一种可爬楼梯的扫地机器人及其工作方法与流程
本申请涉及扫地机,特别是一种可爬楼梯的扫地机器人及其工作方法。
背景技术:
1、扫地机器人,是一种能对地面进行自动吸尘的智能家用电器,其自动化和智能化的清洁给人们带来一定程度的方便,深受广大消费者的喜爱。
2、而随着消费者群体的壮大,有些消费者的住所为复式结构或者为别墅多层结构,而现有的扫地机器人并不具有爬楼的功能,当扫地机器人清扫完下层地面,需要对上层地面进行清扫时,则需要通过消费者将扫地机器人从下层地面搬运至下层地面;同理,扫地机器人先从上层地面清扫至下层地面清扫,也需要消费者人为搬运。故,现有的扫地机器人没有达到完全智能、全自动的扫地效果。
3、故,发明人针对上述技术问题提出带有爬楼功能的扫地机器人。
技术实现思路
1、鉴于所述问题,提出了本申请以便提供克服所述问题或者至少部分地解决所述问题的一种可爬楼的扫地机器人及其工作方法,包括:
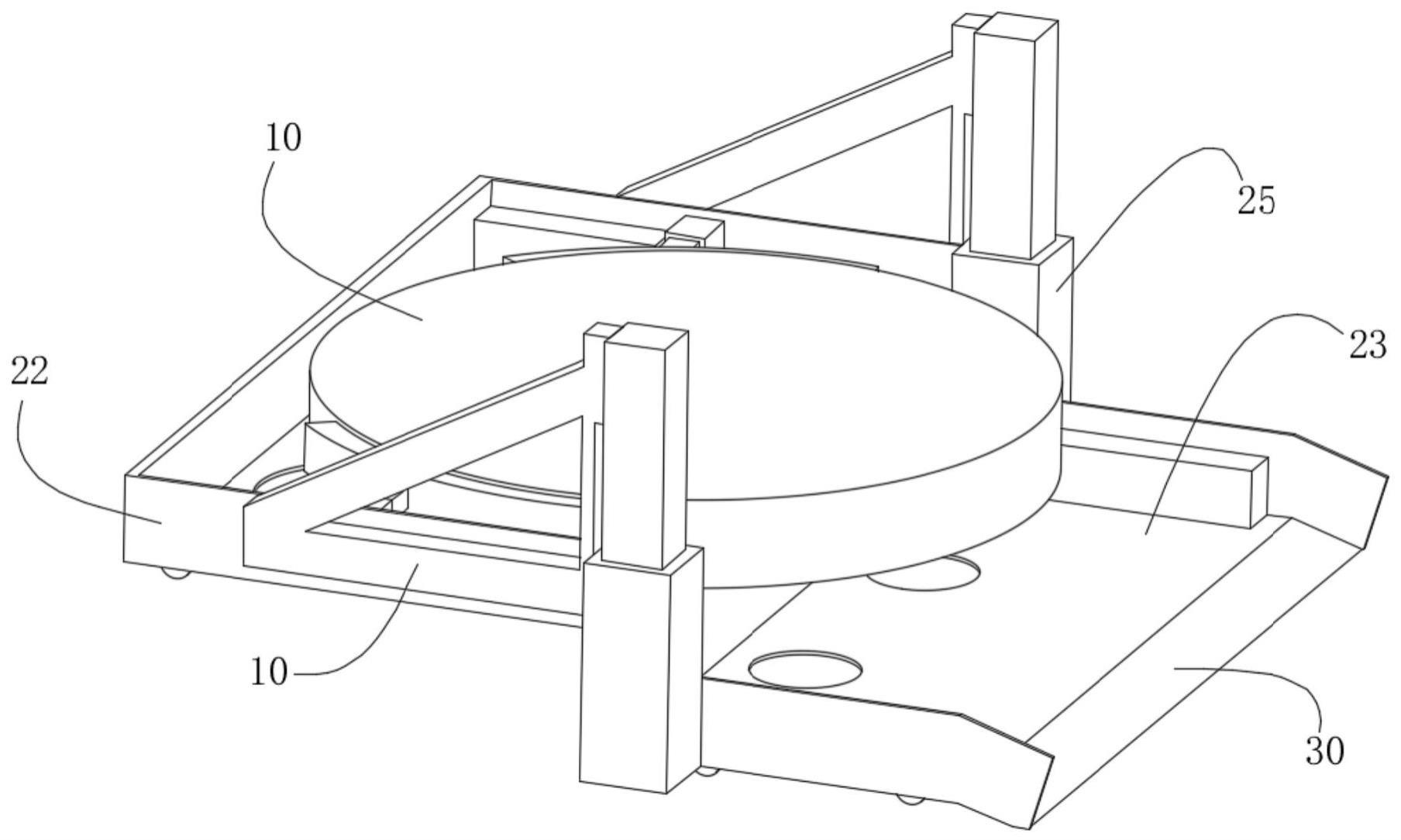
2、一种可爬楼的扫地机器人,包括机器人本体,还包括抬升装置,所述抬升装置包括第一壳体和第二壳体,所述第一壳体的上表面设有第一凹槽,所述第二壳体的上表面设有第二凹槽,所述第一凹槽和所述第二凹槽相邻且连通,所述第一壳体的两对应外侧部分别设有第一伸缩单元,所述第一伸缩单元的固定端与所述第一壳体连接,所述第一伸缩单元的伸缩端作垂直向上运动,该伸缩端通过连接件与所述第二壳体连接;所述第一壳体的底部设有第一行走机构,所述第二壳体的底部设有第二行走机构,当所述第一行走机构和所述第二行走机构位于同一水平面时,所述第一凹槽的内底面和所述第二凹槽内底面齐平;所述第一凹槽远离所述第二凹槽的侧壁与外部贯通,所述机器人本体经过所述第一凹槽移动至所述第二凹槽内,所述第二凹槽内的两内侧壁分别设有夹持机构;
3、当所述机器人本体位于所述第二凹槽内时,两所述夹持机构的夹持端与所述机器人本体的外侧壁抵紧配合,以使得所述机器人本体稳固设于所述第二凹槽。
4、优选的,所述连接件为直角三角形结构,所述连接件的一直角边与所述第一伸缩单元的伸缩端连接,所述连接件的另一直角边与所述第二壳体的外侧壁连接。
5、优选的,所述第一行走机构包括第一万向驱动轮组和第一万向支撑轮组,所述第二行走机构包括第二万向驱动轮组和第二万向支撑轮组。
6、优选的,所述机器人本体的行走机构包括第三万向驱动轮组和第三万向支撑轮组;
7、所述第二凹槽贯通所述第二壳体且对应所述机器人本体的第三万向驱动轮组、边扫机构和吸尘机构分别设有第一过孔,所述第一凹槽贯通所述第一壳体且对应所述机器人本体的第三万向支撑轮组。
8、优选的,所述夹持机构包括第二伸缩单元和夹板,所述夹板为弧形;所述第二伸缩单元的固定端设于所述第二凹槽的内侧壁,所述第二伸缩单元的伸缩端与所述夹板连接,该伸缩端带动伸缩夹板朝所述机器人本体运动;所述夹持机构为两个,两所述夹板作相对运动以夹持所述机器人本体。
9、优选的,所述夹板的朝向所述机器人本体的侧壁设有缓冲防滑层。
10、优选的,所述第一壳体远离所述第二壳体的一侧设有连通所述第一凹槽的斜坡。
11、优选的,所述第二壳体远离所述第一壳体的外侧壁设有导向轮。
12、优选的,所述第二壳体上设有距离监测器,所述距离监测器的监测端朝向阶梯垂直面的方向设置
13、还提供一种可爬楼的扫地机器人的工作方法,应用于上述权利要求1-9任一项所述的可爬楼的扫地机器人,所述方法包括:
14、s110,当机器人本体移动到第二凹槽的指定位置时,通过控制夹持机构将所述机器人本体夹持固定在所述第二凹槽内;
15、s120,当第二壳体接触到第一阶的垂直面时,通过控制第一伸缩机构带动第二壳体和机器人本体上升;
16、s130,当上升到指定高度后,通过控制第一壳体的第一行走机构带动第二壳体和机器人本体朝第二阶的水平面移动;
17、s140,当第一壳体接触到第一阶的垂直面时,通过控制第一伸缩机构带动第一壳体和机器人本体上升,使得第一壳体和第二壳体均位于第二阶的水平面高度;
18、s150,通过控制第二壳体的第二行走机构带动第二壳体和第一壳体在第二阶的水平面上移动。
19、本申请具有以下优点:
20、在本申请实施例中,通过上述扫地机器人包括机器人本体和抬升装置,所述抬升装置包括第一壳体和第二壳体,所述第一壳体的上表面设有第一凹槽,所述第二壳体的上表面设有第二凹槽,所述第一凹槽和所述第二凹槽相邻且连通,所述第一壳体的两对应外侧部分别设有第一伸缩单元,所述第一伸缩单元的固定端与所述第一壳体连接,所述第一伸缩单元的伸缩端作垂直向上运动,该伸缩端通过连接件与所述第二壳体连接;所述第一壳体的底部设有第一行走机构,所述第二壳体的底部设有第二行走机构,当所述第一行走机构和所述第二行走机构位于同一水平面时,所述第一凹槽的内底面和所述第二凹槽内底面齐平;所述第一凹槽远离所述第二凹槽的侧壁与外部贯通,所述机器人本体经过所述第一凹槽移动至所述第二凹槽内,所述第二凹槽内的两内侧壁分别设有夹持机构;当所述机器人本体位于所述第二凹槽内时,两所述夹持机构的夹持端与所述机器人本体的外侧壁抵紧配合,以使得所述机器人本体稳固设于所述第二凹槽。通过第一伸缩单元带动第二壳体和机器人本体同步上升至第二阶的水平面高度,而后第一行走机构带动第一壳体朝第一阶和第二阶的垂直面移动,同步带动第二阶的第二行走机构与第二阶水平面接触,进一步的通过第一行走机构和第二行走机构带动第一壳体接触第一阶和第二阶的垂直面,从而收缩第一伸缩单元使其第一壳体上升至第二阶水平面高度,以便通过第二行走机构将第一壳体也带动到第二阶的水平面上;本申请实施例通过第一伸缩单元、行走结构以及夹持机构之间的巧妙配合,完成将机器人本体从第一阶爬升至第二阶的操作,通过简单的结构设计完成扫地机人空间高度上的位置变换,实用性强,便于市场推广。
技术特征:
1.一种可爬楼的扫地机器人,包括机器人本体,其特征在于,还包括抬升装置,所述抬升装置包括第一壳体和第二壳体,所述第一壳体的上表面设有第一凹槽,所述第二壳体的上表面设有第二凹槽,所述第一凹槽和所述第二凹槽相邻且连通,所述第一壳体的两对应外侧部分别设有第一伸缩单元,所述第一伸缩单元的固定端与所述第一壳体连接,所述第一伸缩单元的伸缩端作垂直向上运动,该伸缩端通过连接件与所述第二壳体连接;所述第一壳体的底部设有第一行走机构,所述第二壳体的底部设有第二行走机构,当所述第一行走机构和所述第二行走机构位于同一水平面时,所述第一凹槽的内底面和所述第二凹槽内底面齐平;所述第一凹槽远离所述第二凹槽的侧壁与外部贯通,所述机器人本体经过所述第一凹槽移动至所述第二凹槽内,所述第二凹槽内的两内侧壁分别设有夹持机构;
2.根据权利要求1所述的可爬楼的扫地机器人,其特征在于,所述连接件为直角三角形结构,所述连接件的一直角边与所述第一伸缩单元的伸缩端连接,所述连接件的另一直角边与所述第二壳体的外侧壁连接。
3.根据权利要求1所述的可爬楼的扫地机器人,其特征在于,所述第一行走机构包括第一万向驱动轮组和第一万向支撑轮组,所述第二行走机构包括第二万向驱动轮组和第二万向支撑轮组。
4.根据权利要求3所述的可爬楼的扫地机器人,其特征在于,所述机器人本体的行走机构包括第三万向驱动轮组和第三万向支撑轮组;
5.根据权利要求1所述的可爬楼的扫地机器人,其特征在于,所述夹持机构包括第二伸缩单元和夹板,所述夹板为弧形;所述第二伸缩单元的固定端设于所述第二凹槽的内侧壁,所述第二伸缩单元的伸缩端与所述夹板连接,该伸缩端带动伸缩夹板朝所述机器人本体运动;所述夹持机构为两个,两所述夹板作相对运动以夹持所述机器人本体。
6.根据权利要求5所述的可爬楼的扫地机器人,其特征在于,所述夹板的朝向所述机器人本体的侧壁设有缓冲防滑层。
7.根据权利要求1所述的可爬楼的扫地机器人,其特征在于,所述第一壳体远离所述第二壳体的一侧设有连通所述第一凹槽的斜坡。
8.根据权利要求1所述的可爬楼的扫地机器人,其特征在于,所述第二壳体远离所述第一壳体的外侧壁设有导向轮。
9.根据权利要求1所述的可爬楼的扫地机器人,其特征在于,所述第二壳体上设有距离监测器,所述距离监测器的监测端朝向阶梯垂直面的方向设置。
10.一种可爬楼的扫地机器人的工作方法,其特征在于,应用于上述权利要求1-9任一项所述的可爬楼的扫地机器人,所述方法包括:
技术总结
本申请涉及扫地机技术领域,特别是一种可爬楼梯的扫地机器人及其工作方法,该扫地机器人包括机器人本体和抬升装置,抬升装置包括第一壳体和第二壳体,第一壳体的上表面设有第一凹槽,第二壳体的上表面设有第二凹槽,第一壳体的两对应外侧部分别设有第一伸缩单元,第一伸缩单元的伸缩端作垂直向上运动,该伸缩端通过连接件与第二壳体连接,第一壳体的底部设有第一行走机构,第二壳体的底部设有第二行走机构,第二凹槽内的两内侧壁分别设有夹持机构,通过第一伸缩单元、行走结构以及夹持机构之间的巧妙配合,完成将机器人本体从第一阶爬升至第二阶的操作。
技术研发人员:魏年勇
受保护的技术使用者:深圳巴诺机器人有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!