一种智能人体工学餐椅的制作方法
1.本实用新型涉及餐椅领域,具体涉及一种智能人体工学餐椅。
背景技术:
2.人体工学,在本质上就是使工具的使用方式尽量适合人体的自然形态,这样就可以使用工具的人在工作时,身体和精神不需要任何主动适应,从而尽量减少使用工具造成的疲劳。
3.现有技术存在以下问题:
4.现有的餐椅不具备人体工学功能,长时间坐着时,因缺乏支撑,会导致腰部受力较多,长时间静坐会导致腰肌劳损,有碍健康,部分餐椅配备腰托,但腰托多为固定设计,无法较好的贴附用户腰部,支撑性能存在不足。
技术实现要素:
5.(一)实用新型目的
6.为解决背景技术中存在的技术问题,本实用新型提出一种智能人体工学餐椅,具有气囊机构辅助腰托智能贴附用户腰部,辅助腰部支撑降低腰部受力的特点。
7.(二)技术方案
8.为解决上述技术问题,本实用新型提供了一种智能人体工学餐椅,包括椅架和升降机构,升降机构包括安装在所述椅架上的液压缸座,所述液压缸座上安装有液压缸,所述液压缸的输出端安装有活塞杆,所述活塞杆的另一端连接有支撑座;
9.所述支撑座上的顶部连接有椅座,所述椅座的尾部连接有椅背;
10.所述椅座和所述椅背的连接拐角为弯曲结构,且弯曲的区间内放置有可形变的腰托,所述腰托内置气囊机构,气囊机构包括限位架、气囊、压力传感器和电磁阀,所述限位架对称安装在所述腰托的内壁,且两个所述限位架之间安装有所述气囊,所述气囊的进气端安装有所述电磁阀,所述电磁阀上安装有连接外部气源的所述通气管,且所述电磁阀和所述压力传感器信号连接,所述压力传感器贴附所述腰托的内壁设置。
11.优选的,所述限位架为“u型”结构,且所述限位架与所述气囊的接触端设置有限位杆。
12.优选的,所述气囊和所述腰托靠背的接触端面为形变区间。
13.优选的,所述椅座的底部安装有气源装置,所述通气管的另一端连接至所述气源装置。
14.优选的,所述侧撑杆上安装凸出的阻尼轴,所述阻尼轴的外壁套设有“l型”结构的阻尼扶手。
15.优选的,所述椅背上开设有镂空的气孔。
16.本实用新型的上述技术方案具有如下有益的技术效果:气囊和腰托靠背的接触端面为形变区间,用户坐在餐椅上时,电磁阀将气体由通气管输入至气囊内,气囊充气顶伸腰
托外壁发生形变,直至压力传感器检测到腰托贴附用户腰部后的压力变化,向电磁阀发送停止信号,停止气体供应,可实现腰托的智能化调整,自动贴附用户腰部,可适应不同身材的用户使用。
附图说明
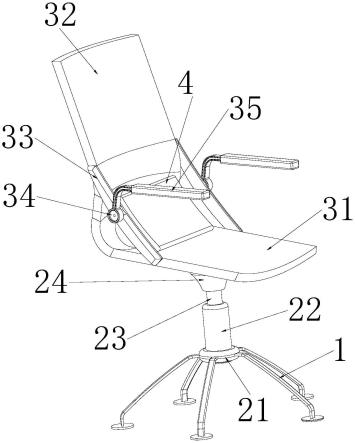
17.图1为本实用新型的结构示意图;
18.图2为本实用新型的气囊机构结构示意图;
19.图3为本实用新型的底部结构示意图。
20.附图标记:
21.1、椅架;21、液压缸座;22、液压缸;23、活塞杆;24、支撑座;31、椅座;32、椅背;33、侧撑杆;34、阻尼轴;35、阻尼扶手;4、腰托;51、限位架;52、气囊;53、压力传感器;54、电磁阀;55、通气管;56、气源装置。
具体实施方式
22.为使本实用新型的目的、技术方案和优点更加清楚明了,下面结合具体实施方式并参照附图,对本实用新型进一步详细说明。应该理解,这些描述只是示例性的,而并非要限制本实用新型的范围。此外,在以下说明中,省略了对公知结构和技术的描述,以避免不必要地混淆本实用新型的概念。
23.如图1-3所示,本实用新型提出的一种智能人体工学餐椅,包括椅架1和升降机构,升降机构包括安装在椅架1上的液压缸座21,液压缸座21上安装有液压缸22,液压缸22的输出端安装有活塞杆23,活塞杆23的另一端连接有支撑座24;
24.支撑座24上的顶部连接有椅座31,椅座31的尾部连接有椅背32;
25.椅座31和椅背32的连接拐角为弯曲结构,且弯曲的区间内放置有可形变的腰托4,腰托4内置气囊机构,气囊机构包括限位架51、气囊52、压力传感器53和电磁阀54,限位架51对称安装在腰托4的内壁,且两个限位架51之间安装有气囊52,气囊52的进气端安装有电磁阀54,电磁阀54上安装有连接外部气源的通气管55,且电磁阀54和压力传感器53信号连接,压力传感器53贴附腰托4的内壁设置。
26.在本实施例中,气囊52和腰托4靠背的接触端面为形变区间,用户坐在餐椅上时,电磁阀54开启,将气体由通气管55输入至气囊52内,气囊52充气发生形变时,侧壁受限位架51限制,凸出形变端顶伸腰托4外壁发生形变,直至压力传感器53检测到腰托4贴附用户腰部后的压力变化,向电磁阀54发送停止信号,停止气体供应,可实现腰托4的智能化调整,自动贴附用户腰部,可适应不同身材的用户使用。
27.需要说明的是:限位架51为“u型”结构,且限位架51与气囊52的接触端设置有限位杆,限位杆的设计辅助对气囊52的限位,且“u型”的结构可起到对气囊52形变端的导向。
28.需要补充的是:椅座31的底部安装有气源装置56,通气管55的另一端连接至气源装置56,气源装置56内蓄积气体,气体经电磁阀54和通气管55的配合在气囊52内和气源装置56循环传输。
29.为了方便用户手部放置,进一步的是,侧撑杆33上安装凸出的阻尼轴34,阻尼轴34的外壁套设有“l型”结构的阻尼扶手35,阻尼结构具有一定的复位性能,在使用时手部经“l
型”结构的阻尼扶手35托举,根据手部受力沿阻尼轴34旋转下压部分,使阻尼扶手35更好的贴附手肘,在使用结束后,阻尼扶手35通过阻尼轴34旋转复位。
30.在一个可选的实施例中,椅背32上开设有镂空的气孔(图中未示出),气孔可提升餐椅椅背的通气性能,防止气体交互较差导致触感下降。
31.应当理解的是,本实用新型的上述具体实施方式仅仅用于示例性说明或解释本实用新型的原理,而不构成对本实用新型的限制。因此,在不偏离本实用新型的精神和范围的情况下所做的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。此外,本实用新型所附权利要求旨在涵盖落入所附权利要求范围和边界、或者这种范围和边界的等同形式内的全部变化和修改例。
技术特征:
1.一种智能人体工学餐椅,其特征在于,包括椅架(1)和升降机构,升降机构包括安装在所述椅架(1)上的液压缸座(21),所述液压缸座(21)上安装有液压缸(22),所述液压缸(22)的输出端安装有活塞杆(23),所述活塞杆(23)的另一端连接有支撑座(24);所述支撑座(24)上的顶部连接有椅座(31),所述椅座(31)的尾部连接有椅背(32);所述椅座(31)和所述椅背(32)的连接拐角为弯曲结构,且弯曲的区间内放置有可形变的腰托(4),所述腰托(4)内置气囊机构,气囊机构包括限位架(51)、气囊(52)、压力传感器(53)和电磁阀(54),所述限位架(51)对称安装在所述腰托(4)的内壁,且两个所述限位架(51)之间安装有所述气囊(52),所述气囊(52)的进气端安装有所述电磁阀(54),所述电磁阀(54)上安装有连接外部气源的通气管(55),且所述电磁阀(54)和所述压力传感器(53)信号连接,所述压力传感器(53)贴附所述腰托(4)的内壁设置。2.根据权利要求1所述的一种智能人体工学餐椅,其特征在于,所述限位架(51)为“u型”结构,且所述限位架(51)与所述气囊(52)的接触端设置有限位杆。3.根据权利要求1所述的一种智能人体工学餐椅,其特征在于,所述椅座(31)的底部安装有气源装置(56),所述通气管(55)的另一端连接至所述气源装置(56)。4.根据权利要求1所述的一种智能人体工学餐椅,其特征在于,还包括侧撑杆(33),所述侧撑杆(33)上安装凸出的阻尼轴(34),所述阻尼轴(34)的外壁套设有“l型”结构的阻尼扶手(35)。5.根据权利要求1所述的一种智能人体工学餐椅,其特征在于,所述椅背(32)上开设有镂空的气孔。
技术总结
本实用新型属于餐椅领域,具体涉及一种智能人体工学餐椅,包括椅架和升降机构,升降机构包括安装在所述椅架上的液压缸座,所述液压缸座上安装有液压缸,所述液压缸的输出端安装有活塞杆,所述活塞杆的另一端连接有支撑座;所述支撑座上的顶部连接有椅座,所述椅座的尾部连接有椅背;所述椅座和所述椅背的连接拐角为弯曲结构,且弯曲的区间内放置有可形变的腰托;用户坐在餐椅上时,电磁阀将气体由通气管输入至气囊内,气囊充气顶伸腰托外壁发生形变,直至压力传感器检测到腰托贴附用户腰部后的压力变化,向电磁阀发送停止信号,停止气体供应,可实现腰托的智能化调整,自动贴附用户腰部,可适应不同身材的用户使用。可适应不同身材的用户使用。可适应不同身材的用户使用。
技术研发人员:汪长虹
受保护的技术使用者:惠州市铁兄弟五金制品有限公司
技术研发日:2022.03.04
技术公布日:2022/9/5
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1