清洁设备及把手组件的制作方法
本申请涉及清洁设备,具体涉及一种清洁设备及把手组件。
背景技术:
1、清洁设备上通常设置有拉杆供用户握持,以便用户拉动清洁设备。但是,通常地,清洁设备上的拉杆的长度及设置角度都是固定的,无法满足用户的实际使用需求。尤其是对于商用清洁机器人,例如商用环境下的大型清洁机器人、割草机、晶面机等,该类大型自移动设备的质量较大,固定长度和角度的拉杆不便于用户使用该些商用清洁机器人。
2、例如,我国专利公开号cn110558904a公开了一种清洁设备,其包括机箱和焊接在机箱的侧壁上的拉手,拉手的长度和角度均是固定的,不便于用户使用。
技术实现思路
1、本申请提供一种清洁设备及把手组件,以改善把手组件的使用效果。
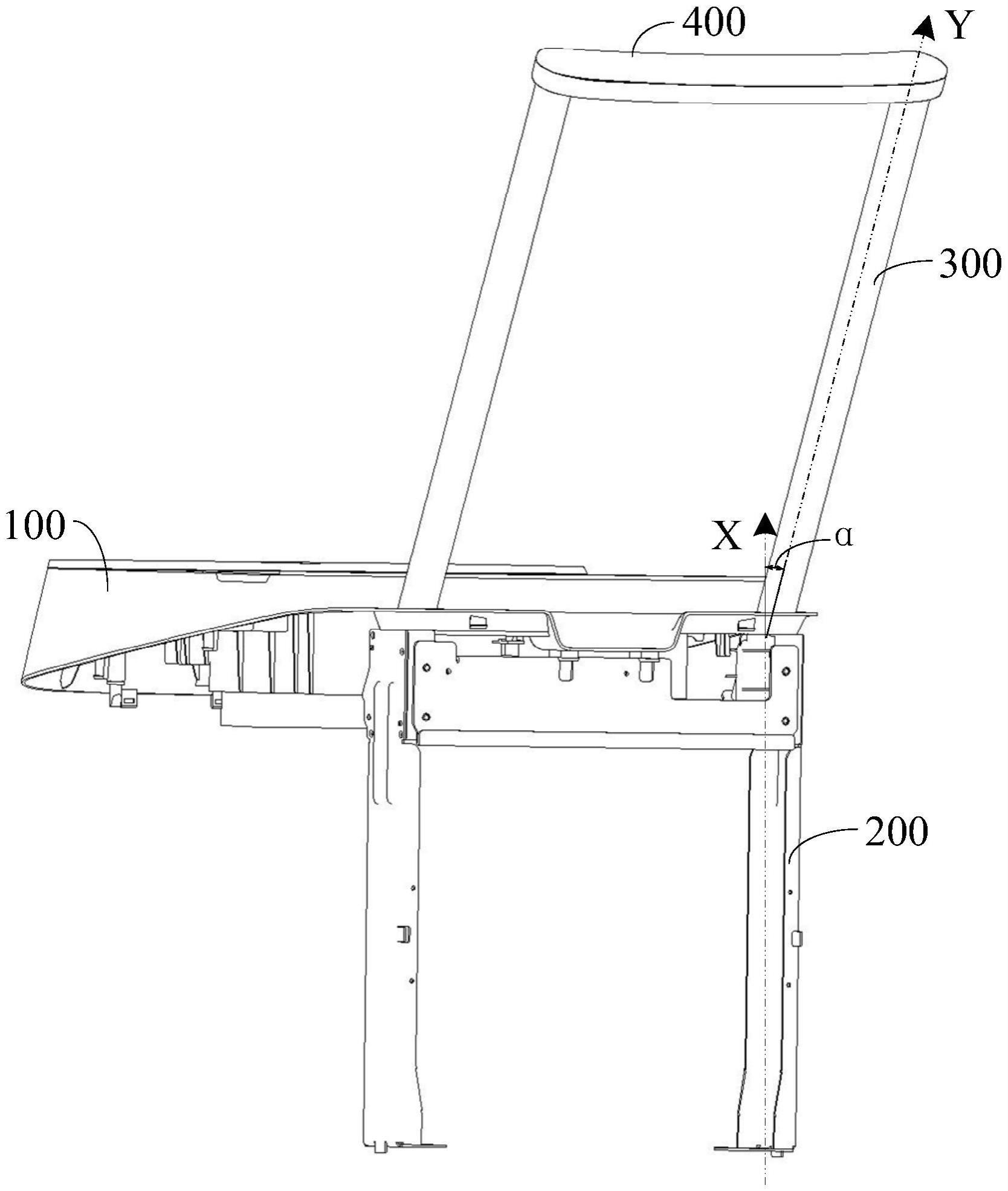
2、本申请提供一种清洁设备,其包括主体、收容件、伸缩件以及握持件,所述收容件设置在所述主体上,所述收容件具有开口、第一容纳空间及第二容纳空间,所述开口连通至第一容纳空间和第二容纳空间,所述第一容纳空间沿着一第一方向延伸,所述第二容纳空间沿着一第二方向延伸,所述第一方向和所述第二方向呈角度设置;所述伸缩件具有相对的第一端和第二端,可转动地设置在所述收容件上,以通过转动可选择地将所述第二端配合至所述第一容纳空间和所述第二容纳空间,且所述第二端配合至所述第一容纳空间时,所述伸缩件可沿着所述第一方向伸缩;所述握持件设置在所述伸缩件上且位于靠近所述第一端的位置。
3、在一些实施例中,所述伸缩件的第二端配合至所述第一容纳空间时,所述伸缩件可沿着所述第一方向移动以实现伸缩。
4、在一些实施例中,在所述开口处还设置有限位部,所述限位部用于将所述伸缩件的一部分限制在所述收容件内。
5、在一些实施例中,所述限位部向着所述开口的径向内侧凸出,以形成一限位位置;所述伸缩件上对应于所述限位部的位置设置有凸出部,当所述伸缩件向外伸出至所述限位位置时,所述限位部抵持在所述凸出部靠近所述开口的一侧。
6、在一些实施例中,以所述凸出部为一转动轴,在所述限位位置,所述伸缩件沿所述转动轴转动以可选择地将所述第二端配合至所述第一容纳空间和所述第二容纳空间。
7、在一些实施例中,所述伸缩件上设置有锁止部;所述第二容纳空间内对应于所述锁止部设置有配合部;所述伸缩件配合至所述第二容纳空间时,所述锁止部可与所述配合部相配合以将所述伸缩件锁止在所述第二容纳空间内。
8、在一些实施例中,所述锁止部为一凸伸部,所述配合部为一凹陷部,所述凸伸部与所述伸缩件之间设置有弹性件,所述弹性件向所述凸伸部施加指向所述凹陷部的作用力,以使所述凸伸部能配合至所述凹陷部内;所述伸缩件上还设置有解锁部,所述解锁部传动连接至所述凸伸部,以用于克服所述弹性件的作用力并解除所述凸伸部与凹陷部之间的配合。
9、在一些实施例中,所述解锁部包括解锁开关以及解锁传动件,所述解锁开关设置在所述握持件上,所述解锁传动件连接在所述解锁开关和所述锁止部之间,受外力作用时,所述解锁开关可通过所述解锁传动件带动所述锁止部移动,以解除所述锁止部与所述配合部之间的配合。
10、在一些实施例中,所述收容件包括本体和转动支架部,所述转动支架部位于所述本体靠近所述握持件的一侧,所述开口位于所述转动支架部远离所述本体的一侧、且所述本体和所述转动支架部的内部相互连通以形成所述第一容纳空间,所述转动支架部的一侧形成有所述第二容纳空间。
11、在一些实施例中,所述第一容纳空间沿着所述第一方向的延伸长度大于所述第二容纳空间沿着所述第二方向的延伸长度。
12、相应地,本申请还提供一种把手组件,包括收容件、伸缩件、以及把手本体。所述伸缩件可伸缩地设置在所述收容件内;所述把手本体设置在所述伸缩件上。
13、其中,所述伸缩件具有第一状态、第二状态及第三状态,在所述第一状态,所述伸缩件的至少部分被容置在所述收容件内;在所述第二状态,所述伸缩件相较于所述第一状态向所述收容件外伸出;在所述第三状态,所述伸缩件相较于所述第二状态时的延伸方向不同。
14、在一些实施例中,所述收容件沿着一第一方向纵长延伸,所述伸缩件沿着一第二方向纵长延伸,在所述第一状态和所述第二状态下,所述第一方向与所述第二方向平行或重合,在所述第三状态下,所述第一方向和所述第二方向之间呈角度设置。
15、在一些实施例中,所述收容件具有开口及第一容纳空间,所述开口连通至所述第一容纳空间,所述第一容纳空间沿着所述第一方向延伸,在所述第一容纳空间靠近所述开口的位置的侧部设置有镂空部;所述伸缩件可穿过所述镂空部向所述第一容纳空间外转动,以达到所述第三状态。
16、在一些实施例中,所述伸缩件上设置有锁止部;所述把手组件还包括配合部;所述锁止部可与所述配合部相配合,以将所述伸缩件锁止在所述第三状态。
17、在一些实施例中,在所述开口处还设置有限位部,所述限位部用于将所述伸缩件的一部分限制在所述开口的内侧。
18、在一些实施例中,所述收容件还具有第二容纳空间,所述第二容纳空间沿着所述第二纵长方向延伸,所述第一容纳空间通过所述镂空部连通至所述第二容纳空间。
19、相应地,本申请还提供一种把手组件,其包括收容件、伸缩件以及把手本体,所述收容件包括相连的本体和转动支架部,所述本体和所述转动支架部的内部相连通,所述转动支架部的一侧设置有镂空部;所述伸缩件可移动地设置在所述收容件内、且具有相对的第一端和第二端;所述把手本体设置在所述伸缩件上且靠近所述第一端。
20、其中,所述伸缩件具有第一位置和第二位置,在所述第一位置,所述伸缩件的第二端位于所述本体内;在所述第二位置,所述伸缩件的第二端移动至所述转动支架部内,并且所述第二端可以穿过所述镂空部以使所述伸缩件得以转动。
21、本申请具有如下有益效果:本申请提供一种清洁设备及把手组件,其中,把手组件包括有收容件、伸缩件和握持件,握持件设置在伸缩件上,伸缩件可以相对于所述收容件伸缩以带动所述握持件移动,在不使用时可以将所述伸缩件的至少部分收缩至所述收容件内,在使用时,可以将所述伸缩件伸出以便用户对所述把手组件进行操作。并且,在将所述伸缩件伸出后,还可以对所述伸缩件的设置角度进行调节,以将所述伸缩件调整至一预设的合适角度,以便用户进行握持连接在伸缩件上的所述握持件并对其进行操作。
22、尤其是,在将所述把手组件应用于商业机器人等清洁设备时,其使得用户便于对该类清洁设备进行推拉等操作。
技术特征:
1.一种清洁设备,其特征在于,包括,
2.如权利要求1所述的清洁设备,其特征在于,所述伸缩件的第二端配合至所述第一容纳空间时,所述伸缩件可沿着所述第一方向移动以实现伸缩。
3.如权利要求1所述的清洁设备,其特征在于,在所述开口处还设置有限位部,所述限位部用于将所述伸缩件的一部分限制在所述收容件内。
4.如权利要求3所述的清洁设备,其特征在于,
5.如权利要求4所述的清洁设备,其特征在于,以所述凸出部为一转动轴,在所述限位位置,所述伸缩件沿所述转动轴转动以可选择地将所述第二端配合至所述第一容纳空间和所述第二容纳空间。
6.如权利要求1所述的清洁设备,其特征在于,
7.如权利要求6所述的清洁设备,其特征在于,所述锁止部为一凸伸部,所述配合部为一凹陷部,所述凸伸部与所述伸缩件之间设置有弹性件,所述弹性件向所述凸伸部施加指向所述凹陷部的作用力,以使所述凸伸部能配合至所述凹陷部内;
8.如权利要求7所述的清洁设备,其特征在于,所述解锁部包括解锁开关以及解锁传动件,所述解锁开关设置在所述握持件上,所述解锁传动件连接在所述解锁开关和所述锁止部之间,受外力作用时,所述解锁开关可通过所述解锁传动件带动所述锁止部移动,以解除所述锁止部与所述配合部之间的配合。
9.如权利要求1所述的清洁设备,其特征在于,所述收容件包括本体和转动支架部,所述转动支架部位于所述本体靠近所述握持件的一侧,所述开口位于所述转动支架部远离所述本体的一侧、且所述本体和所述转动支架部的内部相互连通以形成所述第一容纳空间,所述转动支架部的一侧形成有所述第二容纳空间。
10.如权利要求1所述的清洁设备,其特征在于,所述第一容纳空间沿着所述第一方向的延伸长度大于所述第二容纳空间沿着所述第二方向的延伸长度。
11.一种把手组件,其特征在于,包括,
12.如权利要求11所述的把手组件,其特征在于,所述收容件沿着一第一方向纵长延伸,所述伸缩件沿着一第二方向纵长延伸,在所述第一状态和所述第二状态下,所述第一方向与所述第二方向平行或重合,在所述第三状态下,所述第一方向和所述第二方向之间呈角度设置。
13.如权利要求12所述的把手组件,其特征在于,
14.如权利要求13所述的把手组件,其特征在于,
15.如权利要求13所述的把手组件,其特征在于,在所述开口处还设置有限位部,所述限位部用于将所述伸缩件的一部分限制在所述开口的内侧。
16.如权利要求13所述的把手组件,其特征在于,所述收容件还具有第二容纳空间,所述第二容纳空间沿着所述第二方向延伸,所述第一容纳空间通过所述镂空部连通至所述第二容纳空间。
17.一种把手组件,其特征在于,包括,
技术总结
本申请提供一种清洁设备及把手组件,把手组件包括主体、收容件、伸缩件以及握持件。握持件设置在伸缩件上,伸缩件可以相对于所述收容件伸缩以带动所述握持件移动,在不使用时可以将所述伸缩件的至少部分收缩至所述收容件内,在使用时,可以将所述伸缩件伸出以便用户对所述把手组件进行操作。并且,在将所述伸缩件伸出后,还可以对所述伸缩件的设置角度进行调节,以将所述伸缩件调整至一预设的合适角度,以便用户进行握持连接在伸缩件上的所述握持件并对其进行操作。
技术研发人员:王学斌,刘涛
受保护的技术使用者:科沃斯机器人股份有限公司
技术研发日:20221026
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!