清洁机器人的制作方法
本技术涉及清洁机器人,特别是涉及一种清洁机器人。
背景技术:
1、随着自动清洁工具设备的发展,出现了清洁机器人技术,通过清洁机器人的自动对地面清洁,能够解放双手,大大减轻人们的劳动负担。清洁机器人主要组成部分为底盘模块、清洁模块、水箱模块、控制模块等,各模块互相连接装配成整机。底盘模块作为机器人的承载基础模块,承担着联结各模块的作用。由于拖洗过程中需要用到清水和收集地面的污水,底盘模块中重量最重的当属水箱模块。
2、传统技术中,清洁机器人底盘的框架为金属件,水箱为塑料制品,两者制造公差差异较大,导致整机装配时会出现孔位不能对齐等装配问题,影响清洁机器人的整体结构稳定性。
技术实现思路
1、基于此,有必要提供一种清洁机器人,能够有效提高水箱在底盘上的安装稳定性,保证清洁机器人的整体结构稳定性。
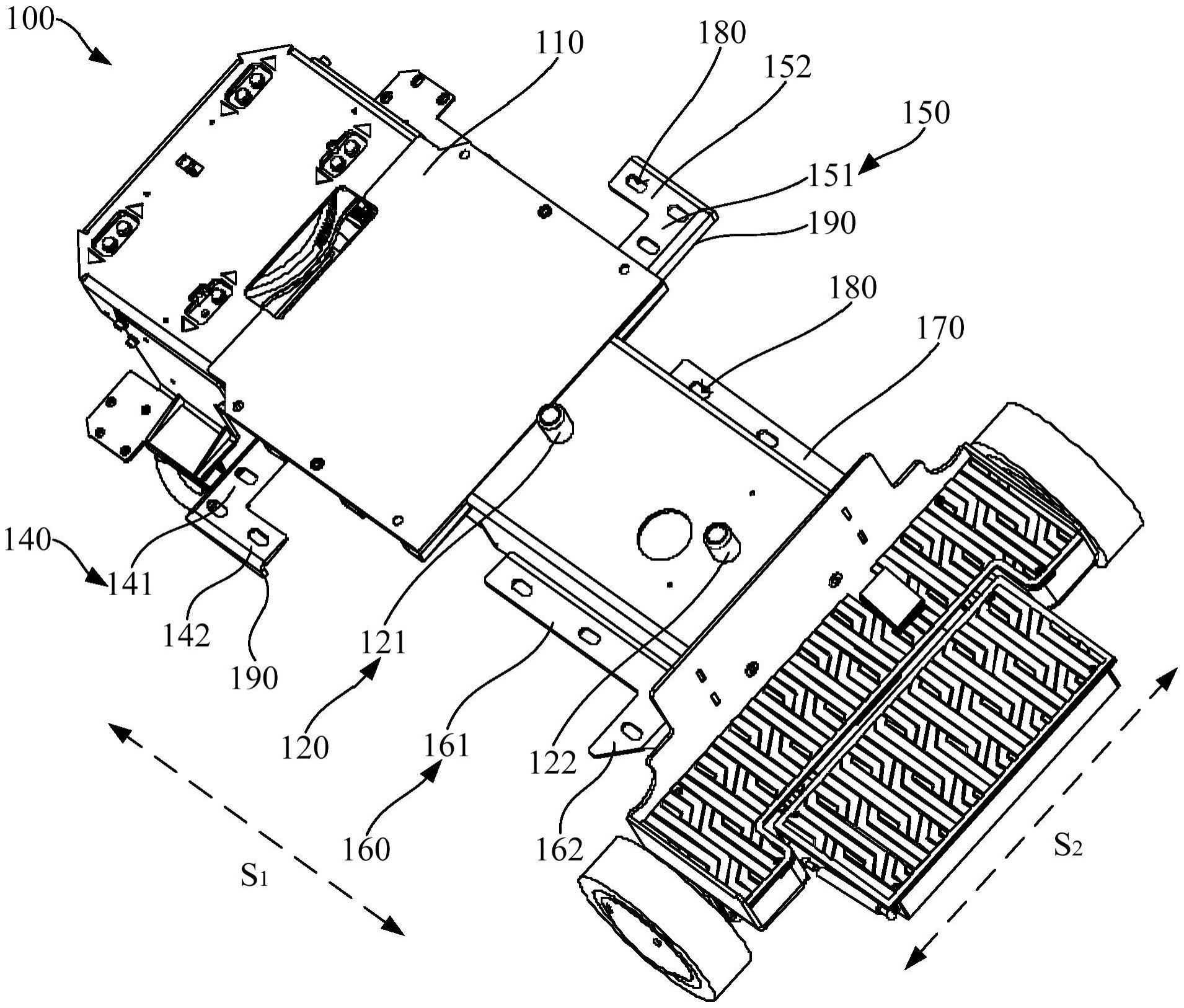
2、其技术方案如下:一种清洁机器人,所述清洁机器人包括:底盘;定位组件,所述定位组件包括第一定位部与第二定位部,所述第一定位部与所述第二定位部在所述底盘上间隔设置;水箱,所述水箱的底壁设有第一配合部与第二配合部,所述第一配合部与所述第一定位部定位配合,所述第二配合部与所述第二定位部定位配合。
3、上述清洁机器人,在安装过程中,将定位组件安装在底盘上,使得第一定位部与第二定位部在底盘上间隔设置,再通过第一配合部和第二配合部分别与第一定位部、第二定位部对应地形成定位配合,使得水箱安装在底盘上,由于有两个配合部与两个定位部形成定位,从而有利于方便水箱的安装,并且使得水箱在底盘上安装稳定,提高清洁机器人的整体结构稳定性。
4、在其中一个实施例中,所述第一定位部与所述第二定位部均为定位柱,且所述第一定位部与所述第二定位部沿所述底盘的长度方向间隔设置,所述第一配合部与所述第二配合部均为凹槽,两个所述定位柱与两个所述凹槽插接配合以使所述水箱与所述底盘定位配合,且所述第二配合部的内轮廓面积大于所述第一配合部的内轮廓面积。
5、在其中一个实施例中,所述第二配合部为腰型凹槽,且所述第二配合部的长度方向与所述底盘的长度方向平行。
6、在其中一个实施例中,所述第一定位部远离所述底盘的一端边缘设有第一引导部,所述第二定位部远离所述底盘的一端边缘设有第二引导部,所述第一引导部用于引导所述第一配合部进入所述第一定位部中,所述第二引导部均用于引导所述第二配合部进入所述第二定位部中。
7、在其中一个实施例中,所述第一配合部的槽口边缘设有第三引导部,所述第二配合部的槽口边缘设有第四引导部,所述第三引导部用于引导所述第一配合部与所述第一定位部定位配合,所述第四引导部用于引导所述第二配合部与所述第二定位部定位配合。
8、在其中一个实施例中,所述清洁机器人还包括第一连接件和第二连接件,所述第一连接件与所述第二连接件沿所述底盘的宽度方向分别设置于所述底盘的相对两侧,且所述第一连接件与所述第二连接件相对所述底盘均向外伸出,所述第一连接件与所述第二连接件分别与所述水箱可拆卸连接。
9、在其中一个实施例中,所述底盘机构还包括第三连接件与第四连接件,所述第三连接件与所述第一连接件位于所述底盘的同侧,且所述第三连接件与所述第一连接件沿所述底盘的长度方向间隔设置,所述第四连接件与所述第二连接件位于所述底盘的同侧,所述第四连接件与所述第二连接件沿所述底盘的长度方向间隔设置,所述第三连接件与所述第四连接件相对于所述底盘均向外伸出,所述第三连接件与所述第四连接件分别与所述水箱可拆卸连接。
10、在其中一个实施例中,所述第一连接件包括第一连接臂与第二连接臂,所述第二连接臂与所述第一连接臂的一端呈夹角设置,所述第一连接臂的另一端与所述底盘连接,所述第一连接臂和/或所述第二连接臂上设有安装部,所述第一连接件通过所述安装部与所述水箱可拆卸连接。
11、在其中一个实施例中,所述第二连接件包括第三连接臂与第四连接臂,所述第四连接臂与所述第三连接臂的一端呈夹角设置,所述第三连接臂的另一端与所述底盘连接,所述第三连接臂和/或所述第四连接臂上设有安装部,所述第二连接件通过所述安装部与所述水箱可拆卸连接。
12、在其中一个实施例中,所述第三连接件包括第五连接臂与第六连接臂,所述第六连接臂与所述第五连接臂的一侧边呈夹角设置,所述第五连接臂的另一侧边与所述底盘连接,所述第五连接臂和/或所述第六连接臂上设有安装部,所述第三连接件通过所述安装部与所述水箱可拆卸连接。
13、在其中一个实施例中,所述第四连接件的一侧边与所述底盘连接,且所述第四连接件的长度方向与所述底盘的长度方向平行,所述第四连接件上设有安装部,所述第四连接件通过所述安装部与所述水箱可拆卸连接。
14、在其中一个实施例中,所述第一连接件和/或所述第二连接件和/或所述第三连接件和/或所述第四连接件设有加强筋,沿所述底盘的高度方向,所述加强筋相对所述第一连接件和/或所述第二连接件和/或所述第三连接件和/或所述第四连接件向外凸起设置。
技术特征:
1.一种清洁机器人,其特征在于,所述清洁机器人包括:
2.根据权利要求1所述的清洁机器人,其特征在于,所述第一定位部与所述第二定位部均为定位柱,且所述第一定位部与所述第二定位部沿所述底盘的长度方向间隔设置,所述第一配合部与所述第二配合部均为凹槽,两个所述定位柱与两个所述凹槽插接配合以使所述水箱与所述底盘定位配合,且所述第二配合部的内轮廓面积大于所述第一配合部的内轮廓面积。
3.根据权利要求2所述的清洁机器人,其特征在于,所述第二配合部为腰型凹槽,且所述第二配合部的长度方向与所述底盘的长度方向平行。
4.根据权利要求2所述的清洁机器人,其特征在于,所述第一定位部远离所述底盘的一端边缘设有第一引导部,所述第二定位部远离所述底盘的一端边缘设有第二引导部,所述第一引导部用于引导所述第一配合部进入所述第一定位部中,所述第二引导部均用于引导所述第二配合部进入所述第二定位部中。
5.根据权利要求2所述的清洁机器人,其特征在于,所述第一配合部的槽口边缘设有第三引导部,所述第二配合部的槽口边缘设有第四引导部,所述第三引导部用于引导所述第一配合部与所述第一定位部定位配合,所述第四引导部用于引导所述第二配合部与所述第二定位部定位配合。
6.根据权利要求1-5中任意一项所述的清洁机器人,其特征在于,所述清洁机器人还包括第一连接件和第二连接件,所述第一连接件与所述第二连接件沿所述底盘的宽度方向分别设置于所述底盘的相对两侧,且所述第一连接件与所述第二连接件相对所述底盘均向外伸出,所述第一连接件与所述第二连接件分别与所述水箱可拆卸连接。
7.根据权利要求6所述的清洁机器人,其特征在于,所述底盘机构还包括第三连接件与第四连接件,所述第三连接件与所述第一连接件位于所述底盘的同侧,且所述第三连接件与所述第一连接件沿所述底盘的长度方向间隔设置,所述第四连接件与所述第二连接件位于所述底盘的同侧,所述第四连接件与所述第二连接件沿所述底盘的长度方向间隔设置,所述第三连接件与所述第四连接件相对于所述底盘均向外伸出,所述第三连接件与所述第四连接件分别与所述水箱可拆卸连接。
8.根据权利要求7所述的清洁机器人,其特征在于,所述第一连接件包括第一连接臂与第二连接臂,所述第二连接臂与所述第一连接臂的一端呈夹角设置,所述第一连接臂的另一端与所述底盘连接,所述第一连接臂和/或所述第二连接臂上设有安装部,所述第一连接件通过所述安装部与所述水箱可拆卸连接;和/或,
9.根据权利要求7所述的清洁机器人,其特征在于,所述第三连接件包括第五连接臂与第六连接臂,所述第六连接臂与所述第五连接臂的一侧边呈夹角设置,所述第五连接臂的另一侧边与所述底盘连接,所述第五连接臂和/或所述第六连接臂上设有安装部,所述第三连接件通过所述安装部与所述水箱可拆卸连接;和/或,
10.根据权利要求7所述的清洁机器人,其特征在于,所述第一连接件和/或所述第二连接件和/或所述第三连接件和/或所述第四连接件设有加强筋,沿所述底盘的高度方向,所述加强筋相对所述第一连接件和/或所述第二连接件和/或所述第三连接件和/或所述第四连接件向外凸起设置。
技术总结
本技术涉及一种清洁机器人。所述清洁机器人包括:底盘;定位组件,所述定位组件包括第一定位部与第二定位部,所述第一定位部与所述第二定位部在所述底盘上间隔设置;水箱,所述水箱的底壁设有第一配合部与第二配合部,所述第一配合部与所述第一定位部定位配合,所述第二配合部与所述第二定位部定位配合。上述清洁机器人,在安装过程中,将定位组件安装在底盘上,再通过第一配合部和第二配合部分别与第一定位部、第二定位部对应地形成定位配合,使得水箱安装在底盘上,由于有两个配合部与两个定位部形成定位,从而有利于方便水箱的安装,并且使得水箱在底盘上安装稳定,提高清洁机器人的整体结构稳定性。
技术研发人员:陈佳吉
受保护的技术使用者:深圳市普渡科技有限公司
技术研发日:20221223
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!