一种清洁机器人的制作方法
本技术涉及清洁设备,具体涉及一种清洁机器人。
背景技术:
1、目前,随着人们生活水平的不断提高,智能清洁设备如清洁机器人等越来越多地应用在现代家庭的日常清洁活动中。清洁机器人一般设有行走装置以实现清洁机器人的移动行走功能,现有技术中,清洁机器人的行走装置通常包括万向轮及驱动轮,驱动轮设置于清洁机器人的底面两侧,万向轮设置于清洁机器人的底面前侧,当清洁机器人碰到障碍物时,可通过万向轮改变清洁机器人的运动方向,从而使清洁机器人正常移动行走,进而完成清洁工作。
2、在现有技术中,万向轮通过插接于固定在清洁机器人的安装座以实现安装在清洁机器人上,固定在清洁机器人上的安装座通常为带卡扣的座体,万向轮安装拆卸较为麻烦。且当卡扣损坏时,万向轮无法插接固定在安装座上,这时候需要更换整个安装座,维护成本较高。
技术实现思路
1、本实用新型提供一种清洁机器人,旨在解决现有技术中万向轮结构较为复杂,且安装拆卸较为麻烦,维护成本较高的问题。
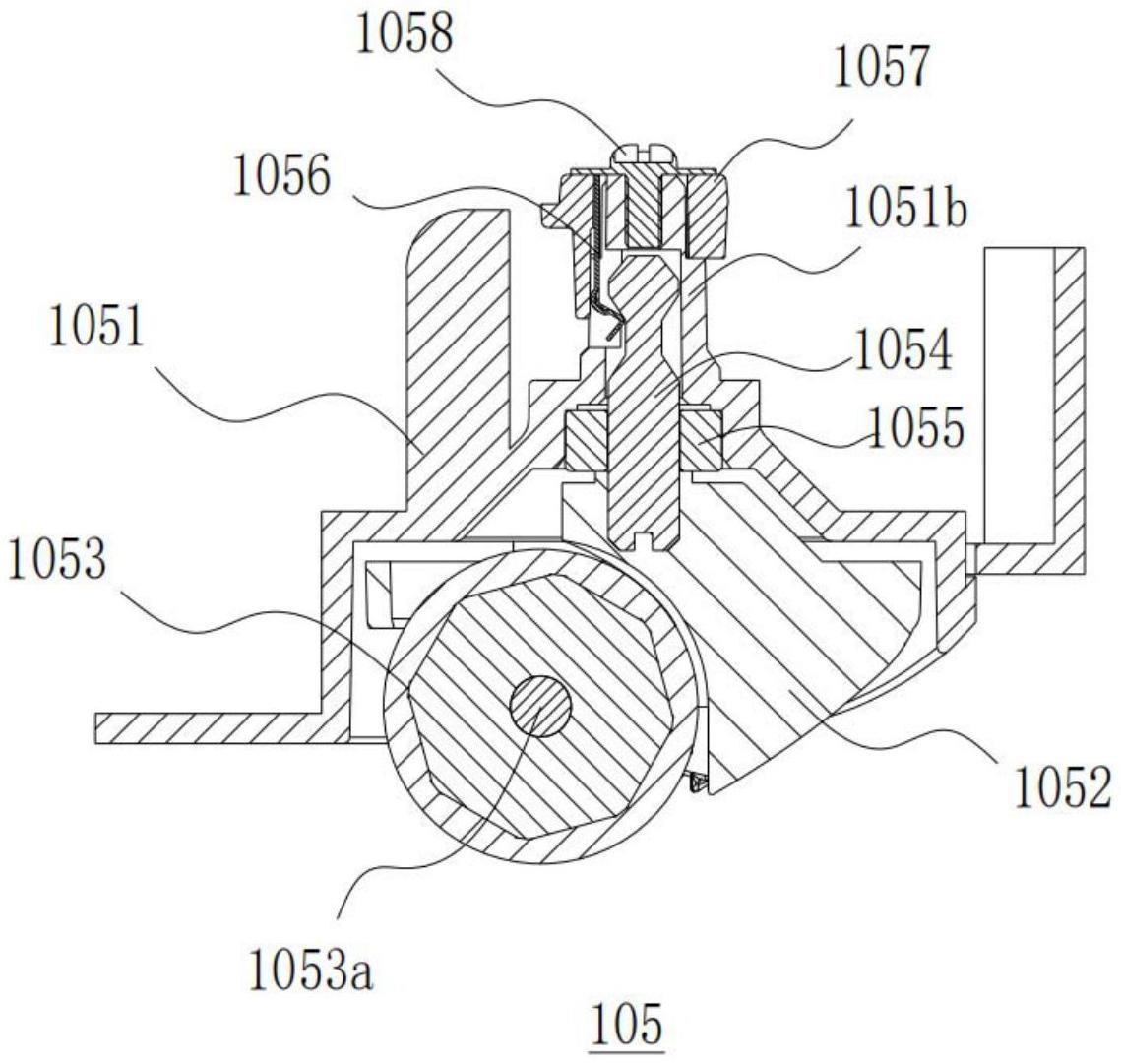
2、为实现上述目的,本实用新型提供一种清洁机器人,包括具有底座的机器主体以及万向轮机构,所述万向轮机构可拆卸地安装至所述底座,所述万向轮机构包括:万向轮,在待清洁面行进;轮座,所述万向轮可转动地安装在所述轮座上;中轴,所述中轴一端连接至所述轮座,另一端连接至所述底座;弹性件,所述弹性件设置在所述底座上,所述弹性件挂扣所述中轴;固定套,所述固定套套接在所述弹性件外周,限制所述弹性件活动。
3、在本实用新型的一些实施例中,还包括轴承,所述轴承设置在所述底座上,所述中轴穿过所述轴承连接至所述底座。
4、在本实用新型的一些实施例中,所述弹性件包括具有弹性的弯折部,所述中轴一端侧壁设有凹槽,所述弯折部挂扣所述凹槽而限制所述中轴的轴向移动。
5、在本实用新型的一些实施例中,所述弹性件周侧等间距设置多个弯折部,多个所述弯折部均挂扣所述中轴的凹槽。
6、在本实用新型的一些实施例中,所述固定套包括弹性臂,所述弹性臂位于在所述弯折部的外侧,所述弹性臂限制所述弯折部的弹性变形。
7、在本实用新型的一些实施例中,所述弹性臂具有弹性,所述弹性臂的弹性系数小于所述弯折部的弹性系数。
8、在本实用新型的一些实施例中,所述固定套设有安装槽,所述安装槽位于所述弯折部的外侧,所述弹性臂可拆卸地插入所述安装槽中。
9、在本实用新型的一些实施例中,所述底座设有内部中空的安装柱,所述中轴插入所述安装柱中空内部,所述弹性件套接在所述安装柱侧壁上,所述安装柱侧壁形成开口部,所述弹性件的弯折部穿过所述开口部而挂扣所述中轴的凹槽。
10、在本实用新型的一些实施例中,所述弯折部与所述凹槽接触的表面为弧面,或所述弯折部与所述凹槽之间的接触面涂敷润滑剂。
11、在本实用新型的一些实施例中,所述固定套通过紧固件锁紧至所述安装柱上,所述固定套套接所述弹性件外周而将所述弹性件固定在所述安装柱上。
12、本实用新型通过提供一种清洁机器人,清洁机器人包括可拆卸地安装至清洁机器人底座的万向轮机构,该万向轮机构包括万向轮、中轴、弹性件和固定套,万向轮通过中轴安装至清洁机器人的底座的安装柱内,弹性件的弯折部挂扣中轴而防止中轴从安装柱内脱离,固定套套接在弹性件外周并设有辅助弯折部恢复弹性变形的弹性臂,该万向轮机构结构简单,且安装拆卸方便快捷,维护成本较低。
技术特征:
1.一种清洁机器人,包括具有底座(1051)的机器主体(101)以及万向轮机构(105),所述万向轮机构(105)可拆卸地安装至所述底座(1051),其特征在于,所述万向轮机构(105)包括:
2.根据权利要求1所述的清洁机器人,其特征在于,还包括轴承(1055),所述轴承(1055)设置在所述底座(1051)上,所述中轴(1054)穿过所述轴承(1055)连接至所述底座(1051)。
3.根据权利要求1所述的清洁机器人,其特征在于,所述弹性件(1056)包括具有弹性的弯折部(1056c),所述中轴(1054)一端侧壁设有凹槽(1054a),所述弯折部(1056c)挂扣所述凹槽(1054a)而限制所述中轴(1054)的轴向移动。
4.根据权利要求3所述的清洁机器人,其特征在于,所述弹性件(1056)周侧等间距设置多个弯折部(1056c),多个所述弯折部(1056c)均挂扣所述中轴(1054)的凹槽(1054a)。
5.根据权利要求3所述的清洁机器人,其特征在于,所述固定套(1057)包括弹性臂(1057a),所述弹性臂(1057a)位于在所述弯折部(1056c)的外侧,所述弹性臂(1057a)限制所述弯折部(1056c)的弹性变形。
6.根据权利要求5所述的清洁机器人,其特征在于,所述弹性臂(1057a)具有弹性,所述弹性臂(1057a)的弹性系数小于所述弯折部(1056c)的弹性系数。
7.根据权利要求5所述的清洁机器人,其特征在于,所述固定套(1057)设有安装槽,所述安装槽位于所述弯折部(1056c)的外侧,所述弹性臂(1057a)可拆卸地插入所述安装槽中。
8.根据权利要求3所述的清洁机器人,其特征在于,所述底座(1051)设有内部中空的安装柱(1051b),所述中轴(1054)插入所述安装柱(1051b)中空内部,所述弹性件(1056)套接在所述安装柱(1051b)侧壁上,所述安装柱(1051b)侧壁形成开口部(1051c),所述弹性件(1056)的弯折部(1056c)穿过所述开口部(1051c)而挂扣所述中轴(1054)的凹槽(1054a)。
9.根据权利要求3所述的清洁机器人,其特征在于,所述弯折部(1056c)与所述凹槽(1054a)接触的表面为弧面,或所述弯折部(1056c)与所述凹槽(1054a)之间的接触面涂敷润滑剂。
10.根据权利要求8所述的清洁机器人,其特征在于,所述固定套(1057)通过紧固件(1058)锁紧至所述安装柱(1051b)上,所述固定套(1057)套接所述弹性件(1056)外周而将所述弹性件(1056)固定在所述安装柱(1051b)上。
技术总结
本技术公开了一种清洁机器人,清洁机器人包括具有底座的机器主体以及万向轮机构,该万向轮机构可拆卸地安装至底座,包括万向轮,在待清洁面行进,万向轮可转动地安装在轮座上;中轴,一端连接至轮座,另一端连接至底座;弹性件,设置在底座上,该弹性件挂扣中轴;固定套,套接在弹性件外周,限制弹性件活动。本技术的万向轮机构结构简单,且安装拆卸方便快捷,维护成本较低。
技术研发人员:邓显舜,叶力荣
受保护的技术使用者:深圳银星智能集团股份有限公司
技术研发日:20221228
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!