一种智能扫地机器人的制作方法
本技术涉及扫地机器人,更具体的说是涉及一种智能扫地机器人。
背景技术:
1、现有的家用智能扫地机器人都仅是实现了两位一体功能,如吸扫一体、吸拖一体或是扫拖一体功能,虽然在一定程度上做到了清洁地面的功能,但目前这种结构在需要切换清洁模式时,只能靠人通过app软件或功能按键来人为去操作,才能使扫地机器人切换清洁模式,而不能根据家庭环境自主适时启动不同的清洁模式,即:无法根据家庭环境智能启动适合的清洁模式,因此现有的家用智能扫地机器人不能适应复杂的家庭环境。
2、因此,如何提供一种能根据家庭环境智能自主启动相应清洁模式的智能扫地机器人是本领域技术人员亟需解决的技术问题。
技术实现思路
1、有鉴于此,本实用新型提供了一种智能扫地机器人,旨在至少解决上述部分技术问题。
2、为了实现上述目的,本实用新型采用如下技术方案:
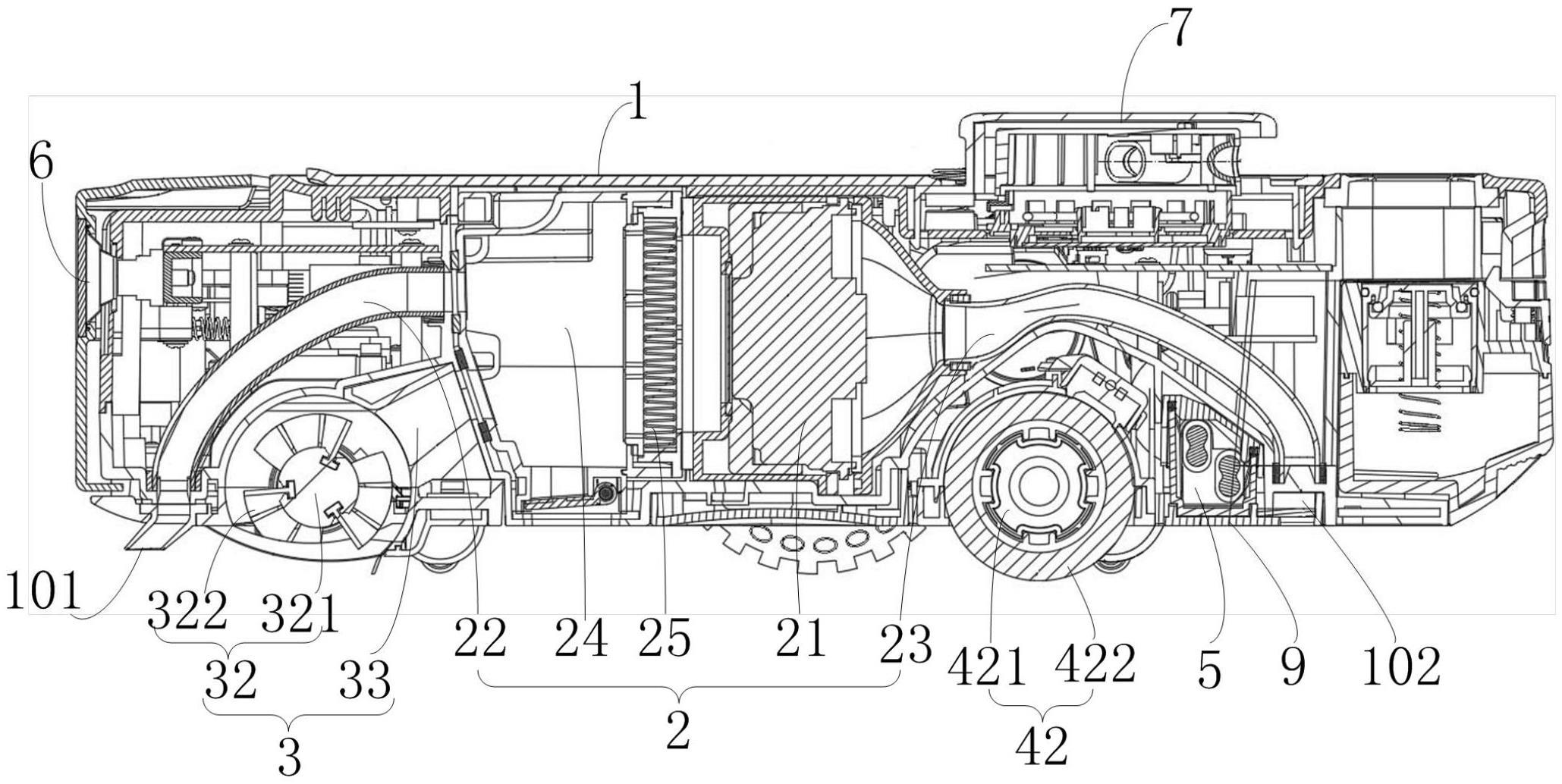
3、一种智能扫地机器人,包括:壳体和均连接在所述壳体上的吸尘系统、清扫系统、拖地系统、uv消杀组件、控制电路板和电源模块,同时所述控制电路板上连接有中央处理器,且所述壳体的底端连接有行走系统,所述壳体的前端连接有视觉摄像头,所述壳体的顶端连接有激光雷达;
4、其中,所述中央处理器通过所述控制电路分别电性连接所述电源模块、所述吸尘系统、所述清扫系统、所述拖地系统、所述uv消杀组件、所述行走系统、所述视觉摄像头和所述激光雷达,同时所述中央处理器通过所述控制电路电性连接有存储器。
5、优选的,所述吸尘系统包括:均连接在所述壳体内的轴流风机、吸口风道、排风管、集尘盒、过滤器,且所述轴流风机与所述中央处理器电性连接;
6、其中,所述壳体的底部分别贯通有吸口和出风口,且所述吸口靠近所述壳体的前端,所述出风口靠近所述壳体的后端;
7、所述吸口风道的吸尘端口接通至所述吸口,所述吸口风道的排尘端口依次接通所述集尘盒、所述过滤器和所述轴流风机的吸风口,同时所述轴流风机的排风口与所述排风管的进口端接通,所述排风管的出口端接通至所述出风口。
8、优选的,所述清扫系统包括:第一驱动电机、滚筒式扫帚和传输管道;
9、其中,所述壳体底端位于所述吸口后方的位置开设有第一安装口,且所述滚筒式扫帚通过第一转轴转动连接在所述壳体内,并与所述第一安装口的位置对应,同时所述滚筒式扫帚的部分外周面可通过所述第一安装口露出在所述壳体外;
10、所述第一驱动电机连接在所述壳体内,并与所述第一转轴连接,以通过所述第一转轴驱动所述滚筒式扫帚转动,同时所述第一驱动电机与所述中央处理器电性连接;
11、所述传输管道的一个端口与所述集尘盒接通,另一个端口靠近所述滚筒式扫帚的外周面。
12、优选的,所述第一安装口靠近所述吸口。
13、优选的,所述拖地系统包括:第二驱动电机、滚筒式拖布和喷水机构;
14、其中,所述壳体底端位于所述出风口前方的位置开设有第二安装口,且所述滚筒式拖布通过第二转轴转动连接在所述壳体内,并与所述第二安装口的位置对应,同时所述滚筒式拖布的部分外周面可通过所述第二安装口露出在所述壳体外;
15、所述第二驱动电机连接在所述壳体内,并与所述第二转轴连接,以通过所述第二转轴驱动所述滚筒式拖布转动,同时所述第二驱动电机与所述中央处理器电性连接;
16、所述喷水机构连接在所述壳体上,且所述喷水机构与所述中央处理器电性连接,同时所述喷水机构的喷水端靠近所述滚筒式拖布的外周面,并朝向所述滚筒式拖布的外周面喷水。
17、优选的,所述喷水机构包括:均连接在所述壳体上的水箱和水泵,以及包括连接在所述壳体内的布水管道,且所述水泵与所述中央处理器电性连接;
18、其中,所述水箱上分别接通有充水口和排水口,所述水箱的所述排水口通过进水管与水泵的进水端接通,所述水泵的出水端通过出水管接通所述布水管道的一端,且所述布水管道远离所述出水管的一端为封闭端,并且所述布水管道靠近在所述滚筒式拖布的上方,同时所述布水管道的长度沿所述滚筒式拖布的轴向延伸;所述布水管道沿其长度方向接通有多个喷头,且多个所述喷头均向所述滚筒式拖布的外周面喷水。
19、优选的,所述水箱与所述壳体可拆卸连接,且所述水箱的所述排水口上连接有弹簧单向阀,同时所述壳体上连接有软管接头,所述弹簧单向阀对接在所述软管接头上,且所述软管接头与所述进水管的一端接通,所述进水管的另一端接通在所述水泵的进水口。
20、优选的,多个所述喷头沿所述布水管道的长度方向均匀分布。
21、优选的,每个所述喷头均为空心“8”字状,且每个所述喷头的尖端均为入水口,并均接通所述布水管道,同时每个所述喷头中部相对的两侧均开设有喷水口,并且每相邻两个所述喷头通过限位板连接,且每个所述限位板的底端面为倒置“人”字状的限位面。
22、优选的,所述uv消杀组件连接在所述壳体内,且所述壳体的底端对应所述uv消杀组件的位置贯通有透光孔。
23、优选的,所述透光孔上连接有透明板。
24、经由上述的技术方案可知,与现有技术相比,本实用新型公开提供了一种智能扫地机器人,可以实现如下技术效果:
25、本申请的中央处理器可根据视觉摄像头的视别信息以及激光雷达的扫描信息计算,并进行判断,以确认开启何种清洁模式,以使本申请能根据家庭环境自主启动相应的清洁模式,从而使本申请适应复杂的家庭环境。
技术特征:
1.一种智能扫地机器人,其特征在于,包括:壳体(1)和均连接在所述壳体(1)上的吸尘系统(2)、清扫系统(3)、拖地系统、uv消杀组件(5)、控制电路板和电源模块,同时所述控制电路板上连接有中央处理器,且所述壳体(1)的底端连接有行走系统,所述壳体(1)的前端连接有视觉摄像头(6),所述壳体(1)的顶端连接有激光雷达(7);
2.根据权利要求1所述的一种智能扫地机器人,其特征在于,所述吸尘系统(2)包括:均连接在所述壳体(1)内的轴流风机(21)、吸口风道(22)、排风管(23)、集尘盒(24)、过滤器(25),且所述轴流风机(21)与所述中央处理器电性连接;
3.根据权利要求2所述的一种智能扫地机器人,其特征在于,所述清扫系统(3)包括:第一驱动电机、滚筒式扫帚(32)和传输管道(33);
4.根据权利要求3所述的一种智能扫地机器人,其特征在于,所述第一安装口靠近所述吸口(101)。
5.根据权利要求2所述的一种智能扫地机器人,其特征在于,所述拖地系统包括:第二驱动电机、滚筒式拖布(42)和喷水机构;
6.根据权利要求5所述的一种智能扫地机器人,其特征在于,所述喷水机构包括:均连接在所述壳体上的水箱(81)和水泵(82),以及包括连接在所述壳体内的布水管道(86),且所述水泵(82)与所述中央处理器电性连接;
7.根据权利要求6所述的一种智能扫地机器人,其特征在于,所述水箱(81)与所述壳体(1)可拆卸连接,且所述水箱(81)的所述排水口上连接有弹簧单向阀(88),同时所述壳体(1)上连接有软管接头(83),所述弹簧单向阀(88)对接在所述软管接头(83)上,且所述软管接头(83)与所述进水管(84)的一端接通,所述进水管(84)的另一端接通在所述水泵(82)的进水口。
8.根据权利要求6所述的一种智能扫地机器人,其特征在于,每个所述喷头(87)均为空心“8”字状,且每个所述喷头(87)的尖端均为入水口(871),并均接通所述布水管道(86),同时每个所述喷头(87)中部相对的两侧均开设有喷水口(872),并且每相邻两个所述喷头(87)通过限位板(870)连接,且每个所述限位板(870)的底端面为倒置“人”字状的限位面(873)。
9.根据权利要求1-8任一项所述的一种智能扫地机器人,其特征在于,所述uv消杀组件(5)连接在所述壳体(1)内,且所述壳体(1)的底端对应所述uv消杀组件(5)的位置贯通有透光孔。
10.根据权利要求9所述的一种智能扫地机器人,其特征在于,所述透光孔上连接有透明板(9)。
技术总结
本技术公开了一种智能扫地机器人,包括:壳体和均连接在壳体上的吸尘系统、清扫系统、拖地系统、UV消杀组件、中央处理器和电源模块,且壳体的底端连接有行走系统,壳体的前端连接有视觉摄像头,壳体的顶端连接有激光雷达;中央处理器分别电性连接电源模块、吸尘系统、清扫系统、拖地系统、UV消杀组件、行走系统、视觉摄像头和激光雷达。本申请能根据家庭环境自主启动相应的清洁模式,从而使本申请适应复杂的家庭环境。
技术研发人员:王利鹏,周强,郭现立
受保护的技术使用者:同温层(深圳)机器人科技有限公司
技术研发日:20221229
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!