机器人清洁器的制作方法
本公开大体上涉及机器人清洁器,并且更具体地涉及用于机器人清洁器的传感器盖。
背景技术:
1、自主清洁装置(例如,机器人清洁器)配置成自主地穿过(或通过)表面,同时至少部分地清洁该表面。自主清洁装置的一个实例是机器人真空清洁器。机器人真空清洁器可以包括抽吸电机、流体地联接到抽吸电机的集尘杯,以及配置成推动机器人真空清洁器跨过待清洁表面的一个或多个从动轮。在操作中,机器人真空清洁器穿过待清洁表面,同时收集存在于待清洁表面上的任何碎屑的至少一部分。
技术实现思路
技术特征:
1.一种机器人清洁器,包括:
2.根据权利要求1所述的机器人清洁器,其中所述盖液体转向器具有在50°至85°范围内的展开角。
3.根据权利要求1所述的机器人清洁器,其中所述本体包括本体液体转向器。
4.根据权利要求3所述的机器人清洁器,其中所述本体液体转向器和所述盖液体转向器配置成协作以在远离所述导航传感器的方向上推动液体。
5.根据权利要求4所述的机器人清洁器,其中所述盖液体转向器与所述本体液体转向器的至少一部分水平地重叠。
6.根据权利要求3所述的机器人清洁器,其中所述本体液体转向器的至少一部分配置成朝向排放开口推动液体。
7.根据权利要求6所述的机器人清洁器,还包括可移动地联接到所述本体的前部部分的可移动缓冲器,其中所述排放开口设置在所述可移动缓冲器的至少一部分与所述导航传感器之间。
8.根据权利要求1所述的机器人清洁器,其中所述盖液体转向器的底表面限定转向器通道。
9.根据权利要求1所述的机器人清洁器,其中所述盖液体转向器限定保护盖容置部,所述保护盖容置部配置成接收所述保护盖的至少一部分。
10.根据权利要求9所述的机器人清洁器,其中所述盖液体转向器进一步限定板容置部,所述板容置部配置成接收板的至少一部分,所述板配置成覆盖形成于所述保护盖与所述盖液体转向器之间的接合部。
11.一种机器人清洁器,包括:
12.根据权利要求11所述的机器人清洁器,其中所述盖液体转向器具有在50°至85°范围内的展开角。
13.根据权利要求11所述的机器人清洁器,其中所述本体包括本体液体转向器。
14.根据权利要求13所述的机器人清洁器,其中所述本体液体转向器和所述盖液体转向器配置成协作以在远离所述lidar传感器的方向上推动液体。
15.根据权利要求14所述的机器人清洁器,其中所述盖液体转向器与所述本体液体转向器的至少一部分水平地重叠。
16.根据权利要求13所述的机器人清洁器,其中所述本体液体转向器的至少一部分配置成朝向排放开口推动液体。
17.根据权利要求16所述的机器人清洁器,还包括可移动地联接到所述本体的前部部分的可移动缓冲器,其中所述排放开口设置在所述可移动缓冲器的至少一部分与所述lidar传感器之间。
18.根据权利要求11所述的机器人清洁器,其中所述盖液体转向器的底表面限定转向器通道。
19.根据权利要求11所述的机器人清洁器,其中所述盖液体转向器限定保护盖容置部,所述保护盖容置部配置成接收所述保护盖的至少一部分。
20.根据权利要求19所述的机器人清洁器,其中所述盖液体转向器进一步限定板容置部,所述板容置部配置成接收板的至少一部分,所述板配置成覆盖形成于所述保护盖与所述盖液体转向器之间的接合部。
技术总结
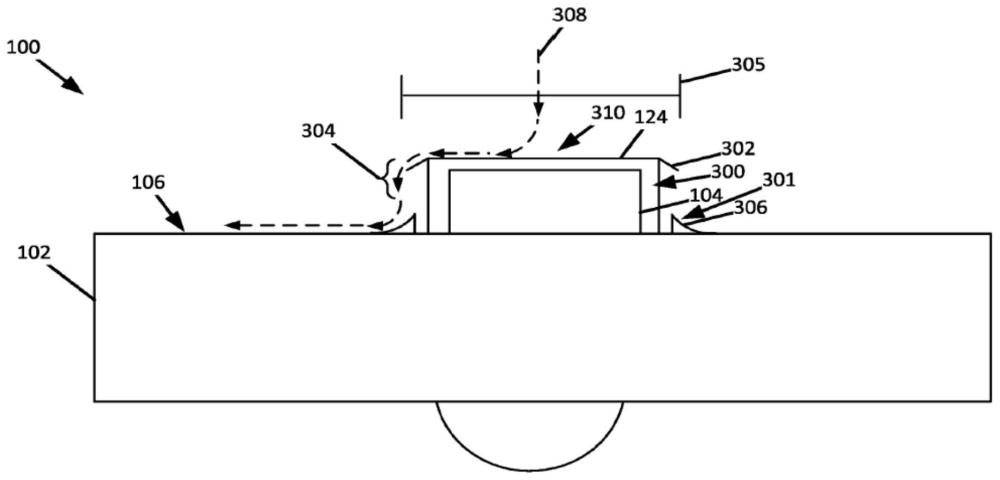
一种机器人清洁器可以包括:具有顶表面的本体;从本体的顶表面延伸的导航传感器;限定传感器腔的保护盖,导航传感器至少部分地接收在传感器腔内;以及从保护盖的上部部分延伸的盖液体转向器,盖液体转向器在本体的方向上展开。
技术研发人员:大卫·哈廷,葛建军,C·沃尔,A·希尔,黄冈,丁俊峰
受保护的技术使用者:尚科宁家运营有限公司
技术研发日:
技术公布日:2024/4/29
- 还没有人留言评论。精彩留言会获得点赞!