扫地机器人的控制方法、装置、扫地机器人及存储介质与流程
本发明属于扫地机器人领域,尤其涉及一种扫地机器人的控制方法、装置、存储介质及扫地机器人。
背景技术:
1、扫地机器人是智能家用电器的一种,现有大多数的扫地机器人的机身后部都会挂载拖布,移动时带动拖布来对地面进行清理,为避免在扫地机器人移动到地毯上时,因拖布与地毯之间的较大摩擦力而导致难以运动的问题,现有的扫地机器人在移动到地毯上时会直接停止工作。而为保证尽可能有效清洁,在通常情况下,扫地机器人会针对地毯进行避让处理,走避让弧线检测地毯轮廓,确保扫地机器人在拖地时避让地毯避免被困。
2、然而,当地毯与墙面间的距离较窄形成窄道时,扫地机器人在未检测到地毯的情况下会沿墙行走直到窄道末端,此时,由于扫地机器人一侧是墙体无法转弯,而另一侧为地毯,若是将大部分机身移动上去,可能会因拖布与地毯接触产生阻力而导致扫地机器人转动困难。
3、若是扫地机器人的后端完全转动到地毯上,导致拖布完全与地毯接触,此时扫地机器人会因为较大的阻力被直接卡死在当前位置无法动弹。即使扫地机器人已经掉头,还存在着扫地机器人在脱离窄道时与墙壁碰撞,导致扫地机器人再次掉头而被困的可能性。
技术实现思路
1、本发明实施例的目的在于提出一种扫地机器人的控制方法,以解决现有技术中扫地机器人在拖地模式下进入到地毯与墙面之间的窄道里时,无法顺利脱离窄道而被困在窄道之中,影响扫地机器人的正常工作与用户体验的技术问题。
2、为了解决上述技术问题,第一方面,本发明提供一种扫地机器人的控制方法,采用了如下所述的技术方案,包括步骤:
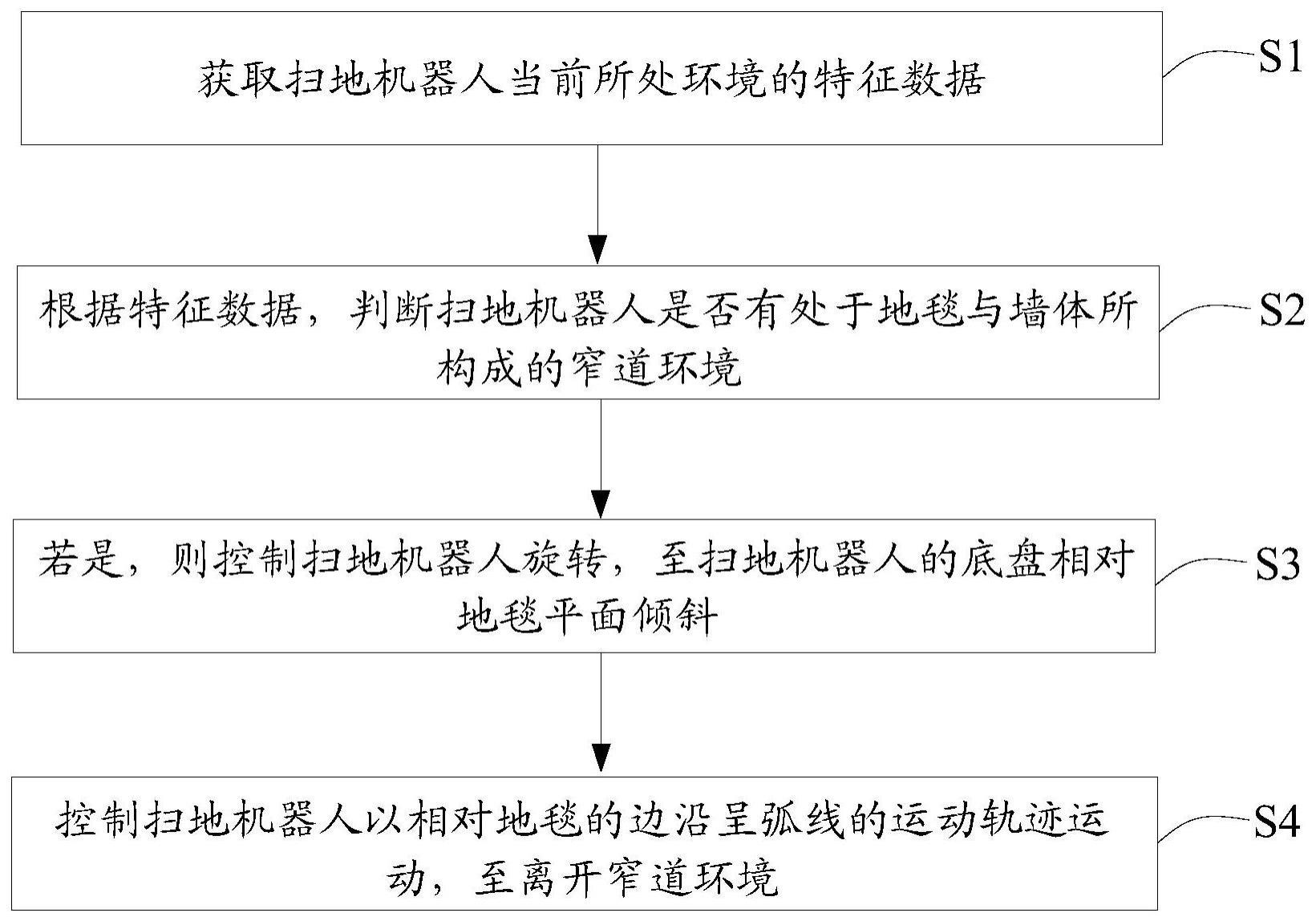
3、获取所述扫地机器人当前所处环境的特征数据;
4、根据所述特征数据,判断所述扫地机器人是否处于地毯与墙体所构成的窄道环境;
5、若是,则控制所述扫地机器人旋转,至所述扫地机器人的底盘相对地毯平面倾斜;以及
6、控制所述扫地机器人以相对地毯的边沿呈弧线的运动轨迹运动,至离开所述窄道环境。
7、第二方面,本发明提供的是一种扫地机器人的控制装置,其包括:
8、获取单元,用于获取所述扫地机器人当前所处环境的特征数据;
9、判断单元,用于根据所述特征数据,判断所述扫地机器人是否处于地毯与墙体所构成的窄道环境;
10、第一控制单元,用于若是,则控制所述扫地机器人旋转,至所述扫地机器人的底盘相对地毯平面倾斜;以及
11、第二控制单元,用于控制所述扫地机器人以相对地毯的边沿呈弧线运动轨迹运动,至离开所述窄道环境。
12、第三方面,本发明提供的是一种扫地机器人,其包括:
13、至少一个存储器、至少一个处理器及至少一个程序指令,所述程序指令存储在所述存储器上并可在所述处理器上运行,所述处理器用于执行上述的扫地机器人的控制方法。
14、第四方面,本发明提供的是一种存储介质,所述存储介质上存储有程序指令,所述程序指令用于执行如上述的扫地机器人的控制方法。
15、本发明的扫地机器人的控制方法中,由于扫地机器人的底盘相对地毯倾斜时,其上的拖布也相对地毯倾斜,此时拖布与地毯之间的接触面积较小、阻力较小,便于扫地机器人在窄道中移动,而控制扫地机器人相对地毯的边沿呈弧线运动,则可避免扫地机器人在做直线运动时,可能会因持续地检测到地毯的存在而停止运行,或因需要避开地毯而与墙体碰撞导致再次掉头的问题,并且扫地机器人以弧线运动能多次识别到地毯的边沿,以更好地识别到地毯轮廓,从而对地毯的大小和形状进行标识,便于后续清扫能避开地毯。
16、另外,由于扫地机器人在窄道环境逃离时因为双轮阻力不一致,实际上难以做直线运动,因此直线前进最终都会走成摇摆前进,而弧形的运动轨迹不但使得扫地机器人与地毯拉开一定的距离,并且相比于尝试做直线运动也更为流畅,使得扫地机器人能够在窄道中有效前进直到完全脱离,可以避免现有的扫地机器人在窄道环境下进行无效率工作的技术缺陷,并能够对窄道进行有效清理,保证扫地机器人的正常工作。
技术特征:
1.一种扫地机器人的控制方法,其特征在于,包括步骤:
2.根据权利要求1所述的扫地机器人的控制方法,其特征在于,所述获取所述扫地机器人当前所处环境的特征数据,包括:
3.根据权利要求2所述的扫地机器人的控制方法,其特征在于,所述根据所述特征数据,判断所述扫地机器人是否处于地毯与墙体所构成的窄道环境,包括:
4.根据权利要求3所述的扫地机器人的控制方法,其特征在于,所述若是,则判断地毯与墙体是否满足构成窄道环境的所需条件,包括:
5.根据权利要求4所述的扫地机器人的控制方法,其特征在于,所述获取地毯边沿与墙体之间的相对宽度,包括:
6.根据权利要求1所述的扫地机器人的控制方法,其特征在于,所述若是,则控制所述扫地机器人旋转至地毯上,使所述扫地机器人的底盘相对地毯平面倾斜,包括:
7.根据权利要求1所述的扫地机器人的控制方法,其特征在于,所述控制所述扫地机器人以相对地毯的边沿呈弧线运动轨迹运动,至离开所述窄道环境,包括:
8.根据权利要求7所述的扫地机器人的控制方法,其特征在于,所述扫地机器人以所述第二设定弧线运动的第二运动幅度,至少为以所述第一设定弧线运动的第一运动幅度的两倍。
9.一种扫地机器人的控制装置,其特征在于,包括:
10.一种扫地机器人,其特征在于,包括:
11.一种存储介质,其特征在于,所述存储介质上存储有程序指令,所述程序指令用于执行如权利要求1至8任一项所述的扫地机器人的控制方法。
技术总结
本发明的扫地机器人的控制方法包括步骤:获取扫地机器人当前所处环境的特征数据;根据特征数据,判断扫地机器人是否处于地毯与墙体所构成的窄道环境;若是,则控制扫地机器人旋转,扫地机器人的底盘相对地毯平面倾斜;控制扫地机器人以相对地毯的边沿呈弧线的运动轨迹运动,至离开窄道环境。本发明还提供一种扫地机器人的控制装置、扫地机器人及存储介质。本发明的技术方案中,由于扫地机器人的底盘相对地毯倾斜时,其上的拖布也相对地毯倾斜,此时拖布与地毯之间的接触面积较小、阻力较小,便于扫地机器人在窄道中移动,而控制扫地机器人相对地毯的边沿呈弧线运动,则可使得扫地机器人与地毯拉开一定的距离,能够在窄道中有效前进直到完全脱离。
技术研发人员:刘烈荣
受保护的技术使用者:深圳拓邦股份有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!