扫地机器人的基站的控制方法及装置与流程
本申请涉及智能家居/智慧家庭,尤其涉及一种扫地机器人的基站的控制方法及装置。
背景技术:
1、带基站的自清洁扫地机器人,逐渐成为应用的主流。基站带有清水箱和污水箱,可以在基站内自动清洁拖布、烘干拖布,相比普通扫地一体机器人一块抹布拖全屋来说,清洁能力更强。在清洁过程中会回洗拖布,始终保持拖布干净,可以清洁的总面积更大。
2、然而现有的基站不可移动,扫地机器人在需要清洁拖布的时候需要移动至基站的位置,进行拖布的清洗,再继续清扫过程,无疑降低了扫地机器人的扫拖效率。
技术实现思路
1、本申请提供一种扫地机器人的基站的控制方法及装置,用以解决现有技术中基站不可移动,扫地机器人在需要清洁拖布的时候需要移动至基站的位置,进行拖布的清洗,再继续清扫过程,降低了扫地机器人的扫拖效率的缺陷,实现基站自动分析得到扫地机器人需要进行拖布自清洁的第一位置,并移动到根据第一位置确定的将要停靠的第二位置,以便于扫地机器人及时进行下次拖布清洗,极大地提高了扫地机器人的扫拖效率。
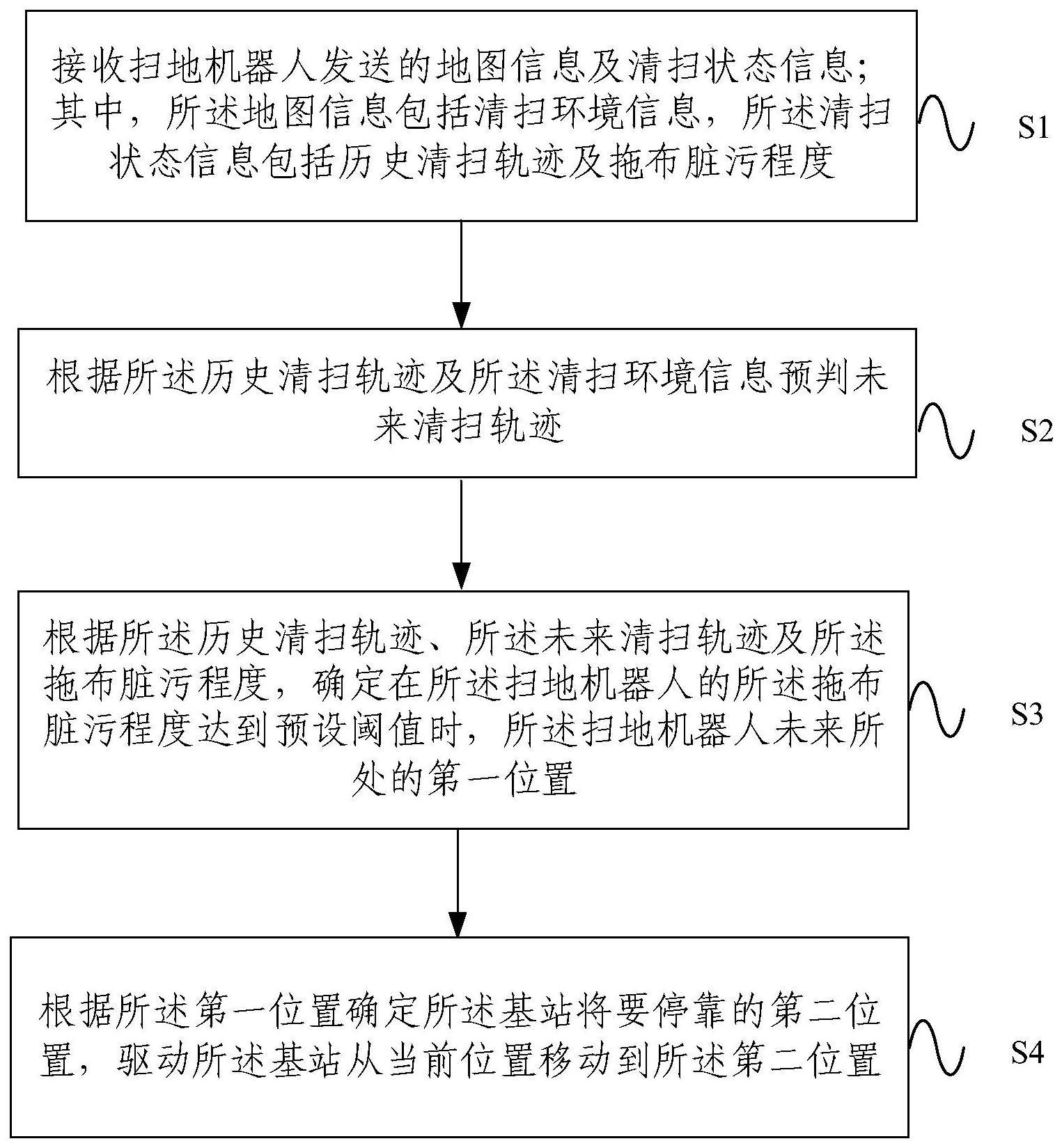
2、本申请提供一种扫地机器人的基站的控制方法,包括:接收扫地机器人发送的地图信息及清扫状态信息;其中,所述地图信息包括清扫环境信息,所述清扫状态信息包括历史清扫轨迹及拖布脏污程度;根据所述历史清扫轨迹及所述清扫环境信息预判未来清扫轨迹;根据所述历史清扫轨迹、所述未来清扫轨迹及所述拖布脏污程度,确定在所述扫地机器人的所述拖布脏污程度达到预设阈值时,所述扫地机器人未来所处的第一位置;根据所述第一位置确定所述基站将要停靠的第二位置,驱动所述基站从当前位置移动到所述第二位置。
3、根据本申请提供的一种扫地机器人的基站的控制方法,所述清扫环境信息包括历史清扫环境信息和未来清扫环境信息;所述根据所述历史清扫轨迹及所述清扫环境信息预判未来清扫轨迹,包括:根据所述历史清扫轨迹及所述历史清扫环境信息确定环境约束下的清扫特征;根据所述环境约束下的清扫特征及所述未来清扫环境信息预判未来清扫轨迹。
4、根据本申请提供的一种扫地机器人的基站的控制方法,所述根据所述历史清扫轨迹、所述未来清扫轨迹及所述拖布脏污程度,确定在所述扫地机器人的所述拖布脏污程度达到预设阈值时,所述扫地机器人未来所处的第一位置,包括:根据所述历史清扫轨迹获取历史清扫量;计算所述预设阈值和所述拖布脏污程度之差,得到拖布脏污程度拟增加值;计算所述拖布脏污程度拟增加值和所述拓扑脏污程度的当前值之比,得到拖布脏污程度比值;根据所述历史清扫量和所述拖布脏污程度比值得到未来清扫量;根据所述未来清扫量和所述未来清扫轨迹确定所述扫地机器人未来所处的第一位置。
5、根据本申请提供的一种扫地机器人的基站的控制方法,所述历史清扫量包括历史清扫面积,所述未来清扫量包括未来清扫面积;或,所述历史清扫量包括历史清扫时间,所述未来清扫量包括未来清扫时间。
6、根据本申请提供的一种扫地机器人的基站的控制方法,所述方法还包括:将所述第二位置发送给所述扫地机器人,以供所述扫地机器人在到达所述第一位置后,向所述第二位置移动。
7、根据本申请提供的一种扫地机器人的基站的控制方法,所述将所述第二位置发送给所述扫地机器人,包括:通过wifi模块和物联网将所述第二位置发送给所述扫地机器人。
8、根据本申请提供的一种扫地机器人的基站的控制方法,所述接收扫地机器人发送的地图信息及清扫状态信息,包括:通过wifi模块和物联网接收扫地机器人发送的地图信息及清扫状态信息。
9、本申请还提供一种扫地机器人的基站的控制装置,包括:信息接收模块,用于:接收扫地机器人发送的地图信息及清扫状态信息;其中,所述地图信息包括清扫环境信息,所述清扫状态信息包括历史清扫轨迹及拖布脏污程度;轨迹预判模块,用于:根据所述历史清扫轨迹及所述清扫环境信息预判未来清扫轨迹;位置确定模块,用于:根据所述历史清扫轨迹、所述未来清扫轨迹及所述拖布脏污程度,确定在所述扫地机器人的所述拖布脏污程度达到预设阈值时,所述扫地机器人未来所处的第一位置;移动控制模块,用于:根据所述第一位置确定所述基站将要停靠的第二位置,驱动所述基站从当前位置移动到所述第二位置。
10、本申请还提供一种电子装置,包括存储器和处理器,所述存储器中存储有计算机程序,所述处理器被设置为通过所述计算机程序执行实现如上述任一种所述扫地机器人的基站的控制方法。
11、本申请还提供一种计算机可读的存储介质,所述计算机可读的存储介质包括存储的程序,其中,所述程序运行时执行实现如上述任一种所述扫地机器人的基站的控制方法。
12、本申请还提供一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现如上述任一种所述扫地机器人的基站的控制方法。
13、本申请提供的扫地机器人的基站的控制方法及装置,通过接收扫地机器人发送的地图信息及清扫状态信息,地图信息包括清扫环境信息,清扫状态信息包括历史清扫轨迹及拖布脏污程度,根据历史清扫轨迹及清扫环境信息预判未来清扫轨迹,根据历史清扫轨迹、未来清扫轨迹及拖布脏污程度,确定在扫地机器人的拖布脏污程度达到预设阈值时,扫地机器人未来所处的第一位置,根据第一位置确定基站将要停靠的第二位置,驱动基站从当前位置移动到第二位置,实现了基站自动分析得到扫地机器人需要进行拖布自清洁的第一位置,并移动到根据第一位置确定的将要停靠的第二位置,以便于扫地机器人及时进行下次拖布清洗,极大地提高了扫地机器人的扫拖效率。
技术特征:
1.一种扫地机器人的基站的控制方法,其特征在于,包括:
2.根据权利要求1所述的扫地机器人的基站的控制方法,其特征在于,所述清扫环境信息包括历史清扫环境信息和未来清扫环境信息;所述根据所述历史清扫轨迹及所述清扫环境信息预判未来清扫轨迹,包括:
3.根据权利要求1所述的扫地机器人的基站的控制方法,其特征在于,所述根据所述历史清扫轨迹、所述未来清扫轨迹及所述拖布脏污程度,确定在所述扫地机器人的所述拖布脏污程度达到预设阈值时,所述扫地机器人未来所处的第一位置,包括:
4.根据权利要求3所述的扫地机器人的基站的控制方法,其特征在于,所述历史清扫量包括历史清扫面积,所述未来清扫量包括未来清扫面积;
5.根据权利要求1所述的扫地机器人的基站的控制方法,其特征在于,所述方法还包括:
6.根据权利要求5所述的扫地机器人的基站的控制方法,其特征在于,所述将所述第二位置发送给所述扫地机器人,包括:
7.根据权利要求1所述的扫地机器人的基站的控制方法,其特征在于,所述接收扫地机器人发送的地图信息及清扫状态信息,包括:
8.一种扫地机器人的基站的控制装置,其特征在于,包括:
9.一种计算机可读的存储介质,其特征在于,所述计算机可读的存储介质包括存储的程序,其中,所述程序运行时执行权利要求1至7中任一项所述的方法。
10.一种电子装置,包括存储器和处理器,其特征在于,所述存储器中存储有计算机程序,所述处理器被设置为通过所述计算机程序执行权利要求1至7中任一项所述的方法。
技术总结
本申请公开了一种扫地机器人的基站的控制方法及装置,涉及智能家居/智慧家庭技术领域,该方法包括:接收扫地机器人的地图信息及清扫状态信息;地图信息包括清扫环境信息,清扫状态信息包括历史清扫轨迹及拖布脏污程度;根据历史清扫轨迹及清扫环境信息预判未来清扫轨迹;根据历史清扫轨迹、未来清扫轨迹及拖布脏污程度,确定扫地机器人的拖布脏污程度达到预设阈值时,扫地机器人未来所处的第一位置;根据第一位置确定基站将要停靠的第二位置,驱动基站从当前位置移动到第二位置。本申请实现了基站自动分析得到扫地机器人需要进行拖布自清洁的第一位置,并移动到根据第一位置确定的第二位置,以便及时进行拖布清洗,提高了扫地机器人的扫拖效率。
技术研发人员:鲜策,刘超,张夕军,王福坤
受保护的技术使用者:海尔机器人科技(青岛)有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!