一种用于建筑楼宇的面壁清洗机器人
本发明涉及智能机器人,特别是涉及一种用于建筑楼宇的面壁清洗机器人。
背景技术:
1、建筑楼宇的面壁通常由玻璃幕墙组成,玻璃幕墙在长时间使用后,表面会出现脏污的情况,因此需要对玻璃表面进行清理,现有的通常雇佣工人站在悬吊的操作平台上对玻璃进行清理,危险系数较高,随着科学技术和自动控制技术的发展,越来越多的危险操作由机器人来代替,以此保证操作人员的人身安全,因此亟需一种用于建筑楼宇的面壁清洗机器人来解决玻璃表面脏污的情况。
技术实现思路
1、本发明的目的是提供一种用于建筑楼宇的面壁清洗机器人,以解决上述问题,达到对玻璃表面清洁的目的。
2、为实现上述目的,本发明提供了如下方案:
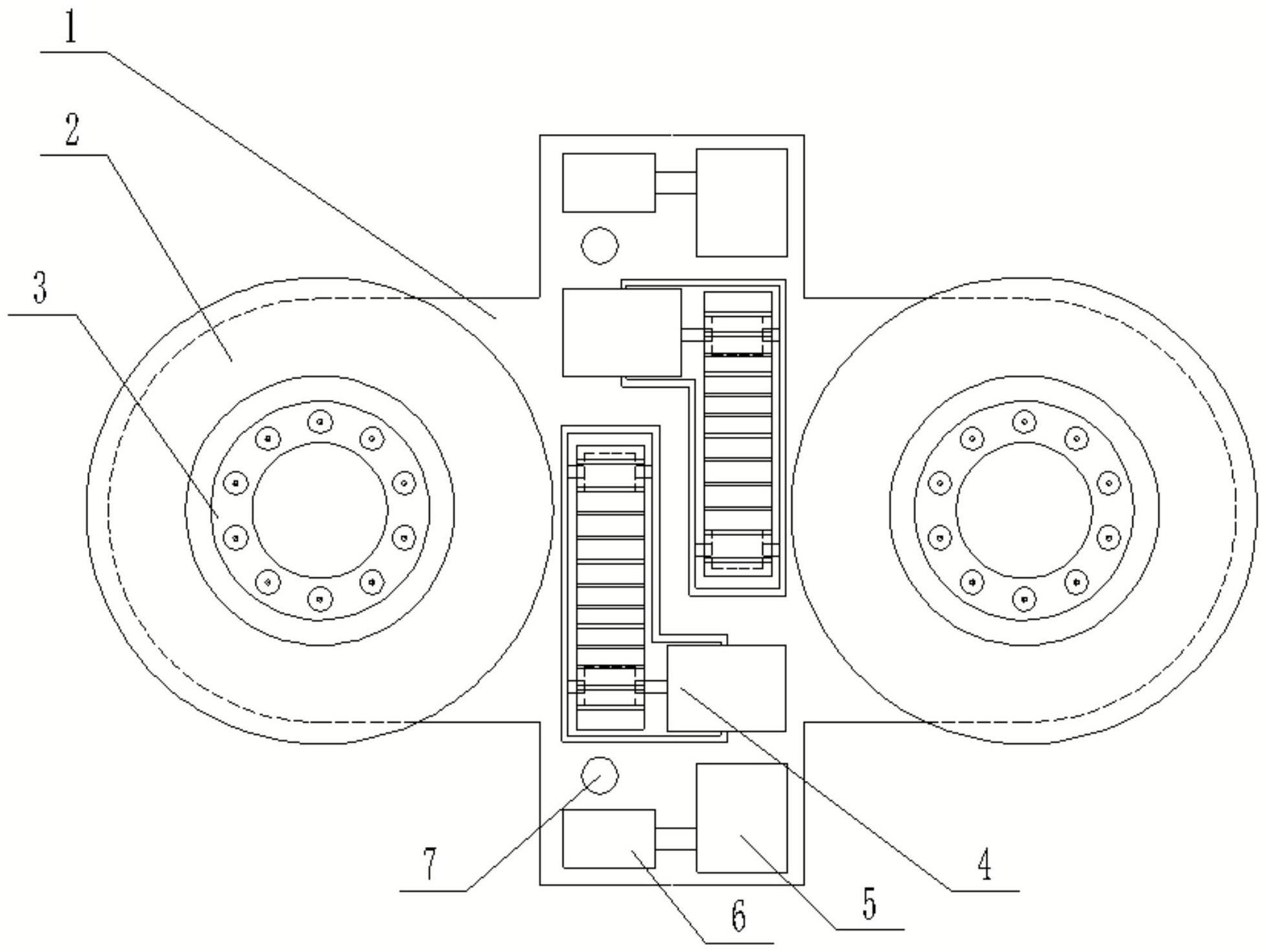
3、一种用于建筑楼宇的面壁清洗机器人,包括机架,所述机架左右两侧分别转动连接有清洁组件,所述清洁组件传动连接有第一动力部,所述机架上下两侧分别设有喷水组件,所述机架中部设有行走组件;所述清洁组件包括转台,所述转台顶部与所述机架转动连接,且与所述第一动力部传动连接,所述转台下方边部可拆卸连接有吸水棉,所述转台下方中部设有吸盘组件。
4、优选的,所述吸盘组件包括密封圈,所述转台底部开设有第一安装槽,所述第一安装槽位于所述转台底部中心,所述密封圈与所述第一安装槽内部固接,密封圈边部开设有若干吸附槽,若干所述吸附槽呈圆形排列,所述吸附槽为板球型结构,所述吸附槽连通有气道,所述气道远离所述吸附槽一侧连通有抽气部,所述气道内设有单向流通部。
5、优选的,所述单向流通部包括第一限位环和第二限位环,所述第二限位环和所述第一限位环边部均与所述气道内壁固接,所述第二限位环和所述第一限位环同轴设置,所述第二限位环和所述第一限位环中部均开设有孔道,所述第一限位环靠近所述第二限位环一侧固接有第二弹簧,所述第二弹簧远离所述第一限位环一侧固接有球体,所述球体位于所述第二限位环下方,所述球体直径大于所述孔道直径。
6、优选的,所述抽气部包括气泵,所述气泵固接于所述转台中部,所述密封圈远离所述吸附槽一侧中部设有接头,所述接头一端与若干所述气道端部连通,所述接头另一端与所述气泵连通。
7、优选的,所述吸水棉为环状结构,所述吸水棉顶面固接有两限位柱,所述转台底部开设有两安装孔,所述限位柱插接在所述安装孔内,所述转台侧壁开设有通孔,所述通孔与所述安装孔连通,所述通孔内插接有销钉,所述限位柱侧壁开设有插孔,所述插孔与所述销钉端部相适配,所述销钉外壁套设有第一弹簧,所述第一弹簧一端与所述销钉固接,所述第一弹簧另一端与所述转台外壁固接。
8、优选的,所述第一动力部包括第二电机,所述第二电机侧壁与所述机架固接,所述第二电机输出轴同轴固接有第一齿轮,所述转台外壁同轴固接有外齿圈,所述外齿圈与所述第一齿轮啮合连接。
9、优选的,所述行走组件包括两呈中心对称设置的行走部,所述行走部包括安装架,所述安装架与所述机架固接,所述安装架内壁分别转动连接有主动轮和从动轮,所述主动轮和从动轮外套设有履带,所述安装架端部固接有第三电机,所述第三电机输出轴与所述主动轮同轴固接。
10、优选的,所述喷水组件包括水箱、蠕动泵和喷头,所述水箱、蠕动泵和喷头均与所述机架固接,所述水箱与所述蠕动泵进口端固接,所述蠕动泵出口端与所述喷头连通。
11、本发明具有如下技术效果:机架用于承载整体装置,清洁组件具有清洁玻璃表面污物的效果,第一动力部为清洁组件的转动提供动力,喷水组件用于向玻璃表面喷水或者清洁液,有助于软化污渍,便于污渍的去除,行走组件使得整体装置可在玻璃表面行走从而将整个玻璃的表面清洗干净,转台通过第一动力部的带动实现绕机架转动的效果,吸水棉用于擦拭玻璃,方便更换,吸盘组件具有使整体装置吸附在玻璃上的作用。
技术特征:
1.一种用于建筑楼宇的面壁清洗机器人,其特征在于:包括机架(1),所述机架(1)左右两侧分别转动连接有清洁组件,所述清洁组件传动连接有第一动力部,所述机架(1)上下两侧分别设有喷水组件,所述机架(1)中部设有行走组件;所述清洁组件包括转台(23),所述转台(23)顶部与所述机架(1)转动连接,且与所述第一动力部传动连接,所述转台(23)下方边部可拆卸连接有吸水棉(2),所述转台(23)下方中部设有吸盘组件(3)。
2.根据权利要求1所述一种用于建筑楼宇的面壁清洗机器人,其特征在于:所述吸盘组件(3)包括密封圈(301),所述转台(23)底部开设有第一安装槽(8),所述第一安装槽(8)位于所述转台(23)底部中心,所述密封圈(301)与所述第一安装槽(8)内部固接,密封圈(301)边部开设有若干吸附槽(302),若干所述吸附槽(302)呈圆形排列,所述吸附槽(302)为半球型结构,所述吸附槽(302)连通有气道(304),所述气道(304)远离所述吸附槽(302)一侧连通有抽气部,所述气道(304)内设有单向流通部。
3.根据权利要求2所述一种用于建筑楼宇的面壁清洗机器人,其特征在于:所述单向流通部包括第一限位环(306)和第二限位环(308),所述第二限位环(308)和所述第一限位环(306)边部均与所述气道(304)内壁固接,所述第二限位环(308)和所述第一限位环(306)同轴设置,所述第二限位环(308)和所述第一限位环(306)中部均开设有孔道,所述第一限位环(306)靠近所述第二限位环(308)一侧固接有第二弹簧(307),所述第二弹簧(307)远离所述第一限位环(306)一侧固接有球体(309),所述球体(309)位于所述第二限位环(308)下方,所述球体(309)直径大于所述孔道直径。
4.根据权利要求2所述一种用于建筑楼宇的面壁清洗机器人,其特征在于:所述抽气部包括气泵(10),所述气泵(10)固接于所述转台(23)中部,所述密封圈(301)远离所述吸附槽(302)一侧中部设有接头(305),所述接头(305)一端与若干所述气道(304)端部连通,所述接头(305)另一端与所述气泵(10)连通。
5.根据权利要求1所述一种用于建筑楼宇的面壁清洗机器人,其特征在于:所述吸水棉(2)为环状结构,所述吸水棉(2)顶面固接有两限位柱(9),所述转台(23)底部开设有两安装孔,所述限位柱(9)插接在所述安装孔内,所述转台(23)侧壁开设有通孔(16),所述通孔(16)与所述安装孔连通,所述通孔(16)内插接有销钉(14),所述限位柱(9)侧壁开设有插孔(17),所述插孔(17)与所述销钉(14)端部相适配,所述销钉(14)外壁套设有第一弹簧(15),所述第一弹簧(15)一端与所述销钉(14)固接,所述第一弹簧(15)另一端与所述转台(23)外壁固接。
6.根据权利要求1所述一种用于建筑楼宇的面壁清洗机器人,其特征在于:所述第一动力部包括第二电机(13),所述第二电机(13)侧壁与所述机架(1)固接,所述第二电机(13)输出轴同轴固接有第一齿轮(12),所述转台(23)外壁同轴固接有外齿圈(11),所述外齿圈(11)与所述第一齿轮(12)啮合连接。
7.根据权利要求1所述一种用于建筑楼宇的面壁清洗机器人,其特征在于:所述行走组件包括两呈中心对称设置的行走部(4),所述行走部(4)包括安装架(405),所述安装架(405)与所述机架(1)固接,所述安装架(405)内壁分别转动连接有主动轮(402)和从动轮(404),所述主动轮(402)和从动轮(404)外套设有履带(403),所述安装架(405)端部固接有第三电机(401),所述第三电机(401)输出轴与所述主动轮(402)同轴固接。
8.根据权利要求1所述一种用于建筑楼宇的面壁清洗机器人,其特征在于:所述喷水组件包括水箱(5)、蠕动泵(6)和喷头(7),所述水箱(5)、蠕动泵(6)和喷头(7)均与所述机架(1)固接,所述水箱(5)与所述蠕动泵(6)进口端固接,所述蠕动泵(6)出口端与所述喷头(7)连通。
技术总结
本发明涉及智能机器人技术领域,特别是涉及一种用于建筑楼宇的面壁清洗机器人,包括机架,机架左右两侧分别转动连接有清洁组件,清洁组件传动连接有第一动力部,机架上下两侧分别设有喷水组件,机架中部设有行走组件;清洁组件包括转台,转台顶部与机架转动连接,且与第一动力部传动连接,转台下方边部可拆卸连接有吸水棉,转台下方中部设有吸盘组件。本发明可以达到对玻璃表面清洁的目的。
技术研发人员:李杨,陈成军,张学峰,杨发展,王光政,王永琪,梁丽萍,刘建泽
受保护的技术使用者:青岛理工大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!