扫地机器人的上桩方法、装置、系统和扫地机器人与流程
本申请涉及扫地机器人,尤其涉及一种扫地机器人的上桩方法、装置、系统和扫地机器人。
背景技术:
1、扫地机器人在家庭中的使用越来越广泛,其优点在于,可以在完成清洁任务或没有足够电量时自动返回充电基站(也称充电桩)进行上桩充电。然而,在实际使用过程中,当充电基站被人挪歪,例如,用户不小心踢到或者小孩因玩耍等都可能使得基站原来的位置发生变化,主要是由于充电基站的吸附地面能力较差。这就容易导致,当扫地机器人在上桩过程中,由于扫地机器人进入基站的口不是正对的,扫地机器人会一直爬不上桩,或者因对基站产生推力,导致基站会被一直推着乱走。
技术实现思路
1、有鉴于此,本申请实施例提供一种扫地机器人的上桩方法、装置、系统和扫地机器人。
2、第一方面,本申请实施例提供一种扫地机器人的上桩方法,包括:
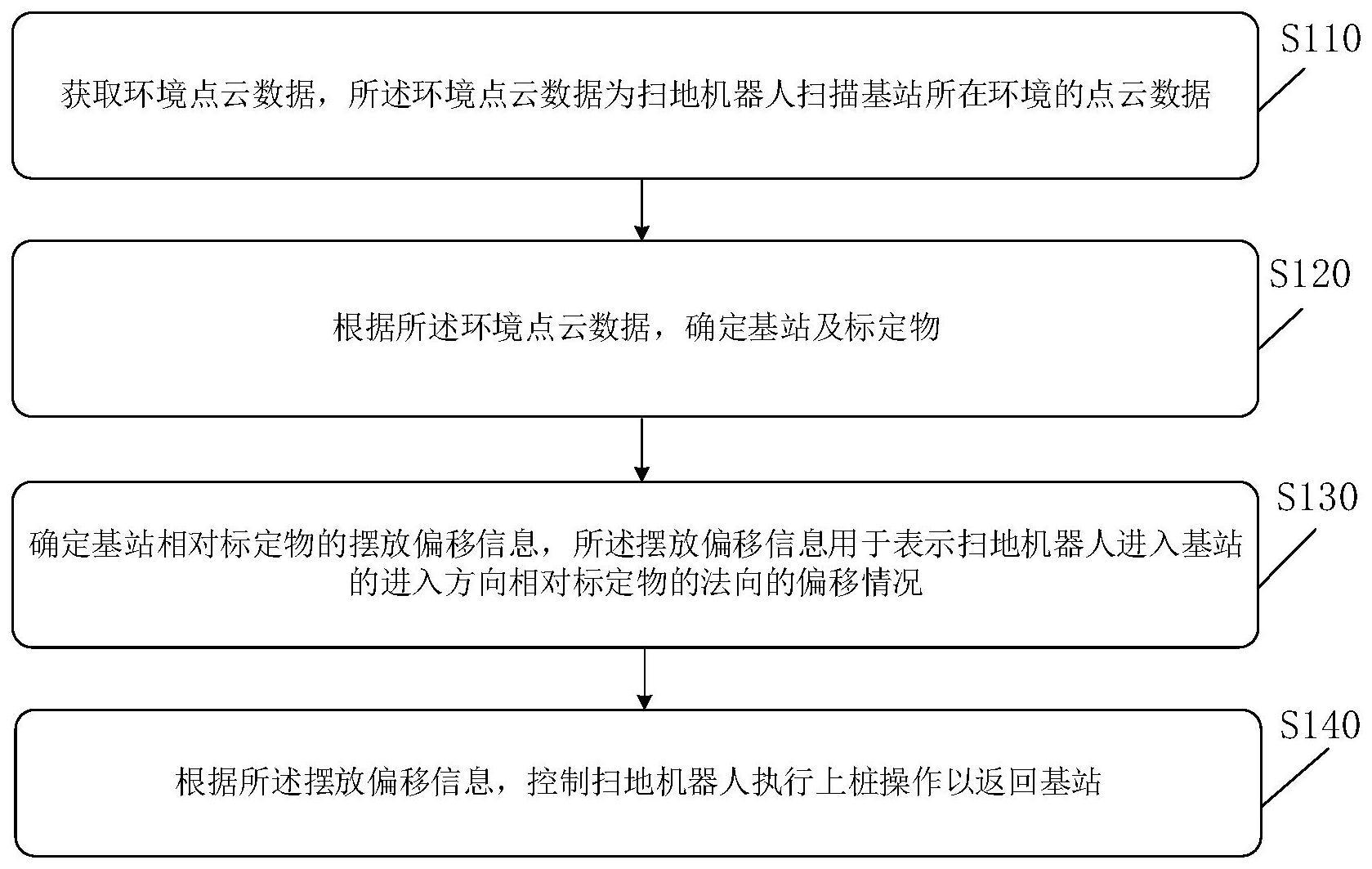
3、获取环境点云数据,所述环境点云数据为扫地机器人扫描基站所在环境的点云数据;
4、根据所述环境点云数据,确定基站及标定物;
5、确定所述基站相对所述标定物的摆放偏移信息,所述摆放偏移信息用于表示所述扫地机器人进入所述基站的进入方向相对所述标定物的法向的偏移情况;
6、根据所述摆放偏移信息,控制所述扫地机器人执行上桩操作以返回所述基站。
7、在一种实施例中,所述根据所述环境点云数据,确定标定物,包括:
8、根据所述环境点云数据,确定至少两个目标障碍物;
9、在至少两个所述目标障碍物中,选择满足标定物条件的目标障碍物作为标定物。
10、在一种实施例中,所述根据所述环境点云数据,确定至少两个目标障碍物,包括:
11、根据所述环境点云数据,确定多个障碍物;
12、沿垂直于每个障碍物的法向将多个所述障碍物拟合生成多条线段;
13、从所述多条线段中筛选出长度大于预设长度阈值的线段作为目标障碍物。
14、在一种实施例中,所述在至少两个所述目标障碍物中,选择满足标定物条件的目标障碍物作为标定物,包括:
15、计算每个所述目标障碍物与所述基站的相对距离;
16、选择最小相对距离对应的目标障碍物作为标定物。
17、在一种实施例中,所述确定所述基站相对所述标定物的摆放偏移信息,包括:
18、确定所述进入方向对应的中心线;
19、根据所述中心线及所述标定物的法向,确定摆放偏移信息。
20、在一种实施例中,所述根据所述中心线及所述标定物的法向,确定摆放偏移信息包括:
21、确定所述中心线的第一法向量及所述标定物的法向的第二法向量;
22、根据所述第一法向量及所述第二法向量确定摆放偏移信息。
23、在一种实施例中,所述摆放偏移信息包括所述进入方向对应的中心线与所述标定物的法向的夹角,所述根据所述摆放偏移信息,控制所述扫地机器人执行上桩操作以返回所述基站,包括:
24、判断所述夹角是否在预设夹角范围;
25、若是,则控制所述扫地机器人执行上桩操作以返回所述基站;
26、若否,则控制所述扫地机器人推动所述基站,使得所述夹角落在预设夹角范围。
27、在一种实施例中,所述基站包括相对的第一侧部和第二侧部,所述控制所述扫地机器人推动所述基站,使得所述夹角落在预设夹角范围,包括:
28、若检测到所述第一侧部与所述标定物的第一距离大于所述第二侧部与所述标定物的第二距离,则控制所述扫地机器人前往所述第一侧部并以所述第二侧部为固定部,推动所述第一侧部靠近所述标定物以使得所述夹角落在预设夹角范围;
29、若检测到所述第一侧部与所述标定物的第一距离小于或等于所述第二侧部与所述标定物的第二距离,则控制所述扫地机器人前往所述第二侧部并以所述第一侧部为固定部,推动所述第二侧部靠近所述标定物以使得所述夹角落在预设夹角范围。
30、在一种实施例中,所述控制所述扫地机器人执行上桩操作以返回所述基站之前,所述方法还包括:
31、平行推动所述基站靠近所述标定物。
32、第二方面,本申请实施例还提供一种扫地机器人的上桩装置,包括:
33、获取模块,用于获取环境点云数据,所述环境点云数据为扫地机器人扫描基站所在环境的点云数据;
34、第一确定模块,用于根据所述环境点云数据,确定基站及标定物;
35、第二确定模块,用于确定所述基站相对所述标定物的摆放偏移信息,所述摆放偏移信息用于表示所述扫地机器人进入所述基站的进入方向相对所述标定物的法向的偏移情况;
36、控制模块,用于根据所述摆放偏移信息,控制所述扫地机器人执行上桩操作以返回所述基站。
37、第三方面,本申请实施例还提供一种扫地机器人的上桩系统,包括:扫地机器人和基站;
38、所述扫地机器人用于获取环境点云数据,所述环境点云数据为所述扫地机器人扫描所述基站所在环境的点云数据;并根据所述环境点云数据,确定所述基站及标定物;
39、所述扫地机器人还用于确定所述基站相对所述标定物的摆放偏移信息,所述摆放偏移信息用于表示所述扫地机器人进入所述基站的进入方向相对所述标定物的法向的偏移情况;并根据所述摆放偏移信息,执行上桩操作以返回所述基站。
40、第四方面,本申请实施例还提供一种扫地机器人,所述车辆包括处理器和存储器,所述存储器存储有计算机程序,所述处理器用于执行所述计算机程序以实施上述的扫地机器人的上桩方法。
41、第五方面,本申请实施例还提供一种计算机可读存储介质,其存储有计算机程序,所述计算机程序在处理器上执行时,实施上述的扫地机器人的上桩方法。
42、本申请的实施例具有如下有益效果:
43、本实施例的扫地机器人的上桩方法通过依据扫地机器人扫描基站所在环境的点云数据来先确定基站与标定物,并进一步确定基站相对标定物的摆放偏移状态,由此来控制扫地机器人让基站往标定物靠近以使其位置稳定,最后执行上桩操作,从而达到快速返回基站目的。该方法提供了一种扫地机器人的新的上桩方式,可以缩短扫地机器人返回充电基站时的上桩时间,提高了上桩效率。
技术特征:
1.一种扫地机器人的上桩方法,其特征在于,包括:
2.根据权利要求1所述的上桩方法,其特征在于,所述根据所述环境点云数据,确定标定物,包括:
3.根据权利要求2所述的上桩方法,其特征在于,所述根据所述环境点云数据,确定至少两个目标障碍物,包括:
4.根据权利要求2所述的上桩方法,其特征在于,所述在至少两个所述目标障碍物中,选择满足标定物条件的目标障碍物作为标定物,包括:
5.根据权利要求1所述的上桩方法,其特征在于,所述确定所述基站相对所述标定物的摆放偏移信息,包括:
6.根据权利要求5所述的上桩方法,其特征在于,所述根据所述中心线及所述标定物的法向,确定摆放偏移信息包括:
7.根据权利要求1至6任一项所述的上桩方法,其特征在于,所述摆放偏移信息包括所述进入方向对应的中心线与所述标定物的法向的夹角,所述根据所述摆放偏移信息,控制所述扫地机器人执行上桩操作以返回所述基站,包括:
8.根据权利要求7所述的上桩方法,其特征在于,所述基站包括相对的第一侧部和第二侧部,所述控制所述扫地机器人推动所述基站,使得所述夹角落在预设夹角范围,包括:
9.根据权利要求7所述的上桩方法,其特征在于,所述控制所述扫地机器人执行上桩操作以返回所述基站之前,所述方法还包括:
10.一种扫地机器人的上桩装置,其特征在于,包括:
11.一种扫地机器人的上桩系统,其特征在于,包括:扫地机器人和基站;
12.一种扫地机器人,其特征在于,所述扫地机器人包括处理器和存储器,所述存储器存储有计算机程序,所述处理器用于执行所述计算机程序以实施权利要求1-9中任一项所述的扫地机器人的上桩方法。
13.一种可读存储介质,其特征在于,其存储有计算机程序,所述计算机程序在处理器上执行时,实施根据权利要求1-9中任一项所述的扫地机器人的上桩方法。
技术总结
本申请涉及扫地机器人技术领域,提供了一种扫地机器人的上桩方法、装置、系统和扫地机器人,该方法包括:获取环境点云数据,所述环境点云数据为扫地机器人扫描基站所在环境的点云数据;根据所述环境点云数据,确定基站及标定物;确定基站相对标定物的摆放偏移信息,所述摆放偏移信息用于表示扫地机器人进入基站的进入方向相对标定物的法向的偏移情况;根据所述摆放偏移信息,控制扫地机器人执行上桩操作以返回基站。该方法可以缩短扫地机器人返回充电基站时的上桩时间,减少返回基站时间。
技术研发人员:朱懋燕,胡子豪
受保护的技术使用者:深圳市镭神智能系统有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!