一种移动机器人稳定运动结构
本发明涉及一种运动结构,具体涉及一种移动机器人稳定运动结构,属于移动机器人。
背景技术:
1、移动机器人,即可在地面上进行移动的机器人,其大量使用在工业生产中,可进行物料的搬运,在不同的车间内进行搬运。
2、现有专利文献“cn205168676u一种移动机器人”中,其提供了可进行机器人移动的运动结构,通过驱动同步带进行移动,从而可在地面上进行移动;
3、但其存在如下缺陷,在进行移动时,同步带长期和地面进行接触,其上会附着大量的灰尘或杂物,在移动时,会影响移动的稳定性,进一步长期在地面上进行移动,同步带会产生磨损,从而会影响同步带的张力,进而会影响同步带的运动,影响移动的稳定性,现有技术中运动结构稳定较差。
4、因此,针对上述问题提出一种移动机器人稳定运动结构。
技术实现思路
1、为了解决现有技术的不足,本申请提供一种移动机器人稳定运动结构,其增设了可进行同步带张力调节的吸尘机构,通过吸尘器提供吸尘的吸力,可使同步带表面粘附的灰尘进行吸除,避免表面粘附灰尘或杂物,影响运动的稳定性,进一步提高了机器人在各个车间中移动的无尘性,避免在进出无尘车间时,附着灰尘。用于解决现有技术中运动时会附着灰尘以及杂物,从而会造成影响移动的问题。
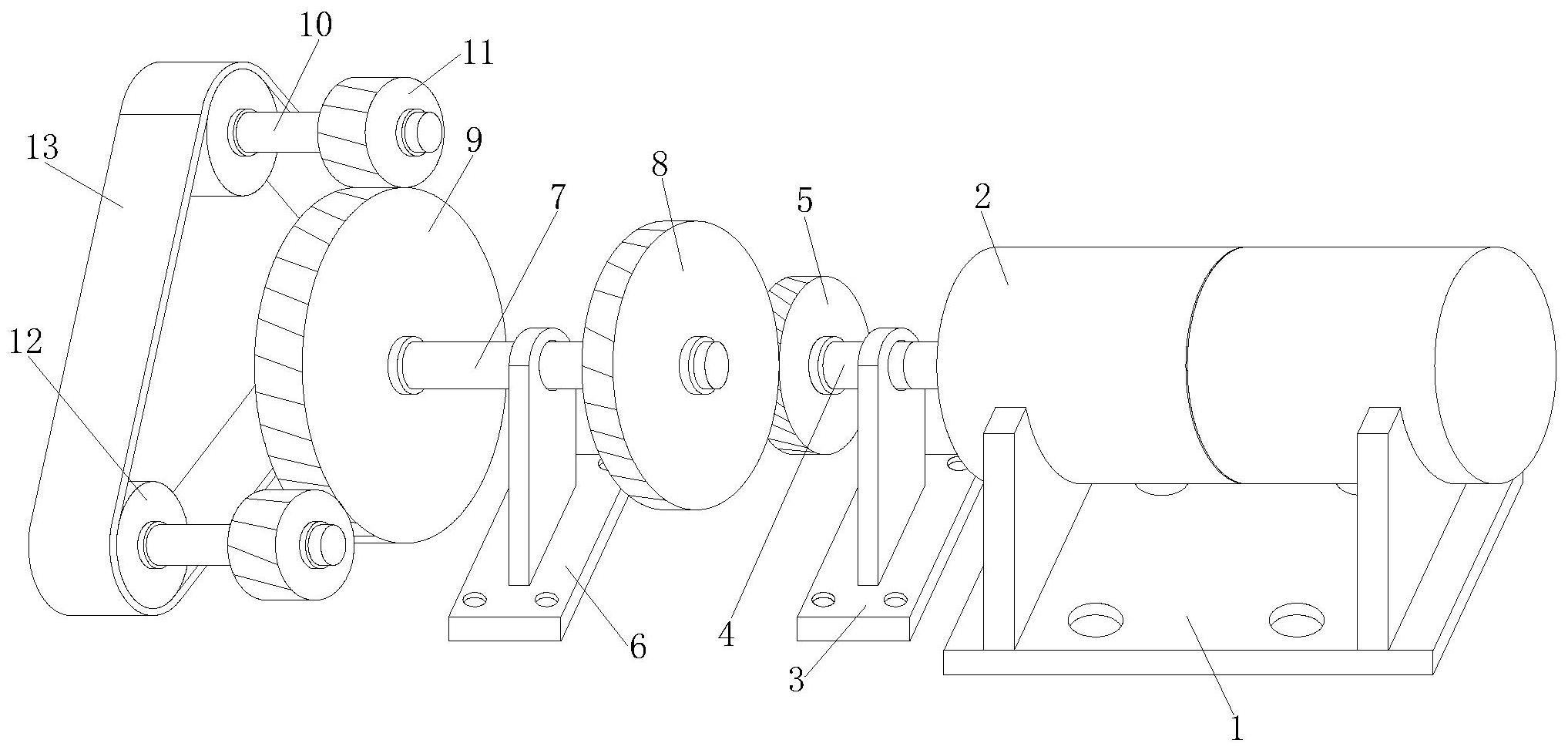
2、根据本申请的一个方面,提供了一种移动机器人稳定运动结构,其包括:第一架体、电机、第二架体、第一轴体、第一齿轮、第三架体、第二轴体、第二齿轮、第三齿轮、第三轴体、第四齿轮、同步轮、同步带、机器人底壳以及吸尘机构;其中,所述电机固定安装在所述第一架体上,所述第一架体固定安装在所述机器人底壳的内部,所述电机的输出轴端固定安装有所述第一轴体,所述第一轴体上固定套接有所述第一齿轮,所述第一齿轮啮合连接有所述第二齿轮,所述第二齿轮的中部固定安装有所述第二轴体,所述第一轴体与所述第二架体转动安装,所述第二轴体与所述第三架体转动安装,所述第二架体和所述第三架体均固定安装在所述机器人底壳的内部,所述第二轴体上还固定套接有所述第三齿轮,所述第三齿轮的四周均匀分布有三个所述第四齿轮,所述第四齿轮与所述第三齿轮啮合连接,所述第四齿轮的中部固定安装有所述第三轴体,所述第三轴体与所述机器人底壳壁转动安装,三个所述第三轴体的一端均固定套接有一个所述同步轮,三个所述同步轮上绕缠有所述同步带;所述同步带的外带面上贴靠有吸尘机构,所述吸尘机构包括:吸尘圆筒,所述吸尘圆筒与同步带的外带面接触,所述吸尘圆筒为同步带提供压力,为同步带提供张力,保障同步带的绷紧。
3、进一步地,所述吸尘机构还包括:吸尘器、吸尘软管以及活动空心块,所述吸尘器固定安装在所述机器人底壳内壁上,所述吸尘器的输出端固定套接有所述吸尘软管,所述活动空心块的一端设置有接口,所述接口与所述活动空心块内部连通,所述活动空心块另一端的开口处固定安装有嵌环体,所述吸尘圆筒的一端设置有吸口,所述吸口与活动空心块的开口端嵌合连接,所述嵌环体与开设在吸口外壁上的环形槽嵌合,所述活动空心块的内部固定安装有挡环,所述挡环的一侧设置有密封垫,所述密封垫与吸口的端部接触;所述吸尘圆筒的筒壁上均匀开设有若干个吸尘细孔。
4、进一步地,所述机器人底壳壁上开设有导向槽,所述导向槽内穿过吸尘圆筒,所述吸尘圆筒与导向槽滑动连接。
5、进一步地,所述活动空心块为方块型结构,所述活动空心块上套设有定位导座,所述定位导座上开设有活动槽,所述活动空心块与所述活动槽滑动连接,所述定位导座的一端内座壁上固定安装有压力传感器,所述压力传感器表面上覆盖有压盘,所述压盘通过多个第一弹簧与所述活动空心块弹性连接,所述第一弹簧的一端与所述压盘的盘面固定连接,所述第一弹簧的另一端与所述活动空心块固定连接。
6、进一步地,所述定位导座的一端固定安装有螺杆,所述螺杆螺纹连接有螺纹管,所述螺纹管上转动安装有多个固定架,所述固定架固定安装在所述机器人底壳的内壁上,所述螺纹管的一端中部固定连接有圆轴。
7、进一步地,所述圆轴上套有蜗轮,所述蜗轮啮合连接有蜗杆,所述蜗杆的一端与第二轴体的一端固定连接,所述蜗杆的另一端与所述机器人底壳壁转动安装。
8、进一步地,所述圆轴远离螺纹管的一端开设有圆孔,所述圆轴贯穿开设在所述蜗轮中部的圆孔,所述圆孔的孔壁上开设有圆环槽,所述圆环槽内间隙配合有圆环块。
9、进一步地,所述圆环块的四周外壁上均匀开设有若干个第一导槽,所述圆环块的内壁上均匀开设有若干个第二导槽,所述第一导槽与所述第二导槽连通,所述第二导槽与圆孔连通,所述第一导槽间隙配合连接有压块,所述压块的一端与圆环槽的槽壁接触,所述压块的另一端固定连接有推块,所述推块与第二导槽间隙配合连接,且推块穿过第二导槽,所述推块远离压块的一端设置斜面,所述第一导槽的内部设置有多个第二弹簧,所述第二弹簧的一端与第一导槽的槽壁固定连接,所述第二弹簧的另一端与压块固定连接。
10、进一步地,所述圆孔内部设置有圆台块,所述圆轴远离螺纹管的一端设置有电动推杆,所述电动推杆转动安装有座体,所述座体与机器人底壳的内壁固定连接,所述电动推杆的输出轴端固定连接有圆台块。
11、进一步地,所述圆台块的侧面与推块的斜面接触。
12、本申请的有益之处在于:该种移动机器人稳定运动结构在传统技术上进行了改进,其增设了可进行同步带张力调节的吸尘机构,通过吸尘器提供吸尘的吸力,可使同步带表面粘附的灰尘进行吸除,避免表面粘附灰尘或杂物,影响运动的稳定性,进一步提高了机器人在各个车间中移动的无尘性,避免在进出无尘车间时,附着灰尘;进一步其通过调节吸尘圆筒的位置,可进行同步带压力的调节,从而实现了同步带张力的调节,其吸尘圆筒的驱动,通过驱动进行运动的电机提供驱动的动力,无需额外设置其他的驱动源,整体使用便捷。
技术特征:
1.一种移动机器人稳定运动结构,其特征在于:包括:第一架体(1)、电机(2)、第二架体(3)、第一轴体(4)、第一齿轮(5)、第三架体(6)、第二轴体(7)、第二齿轮(8)、第三齿轮(9)、第三轴体(10)、第四齿轮(11)、同步轮(12)、同步带(13)、机器人底壳(14)以及吸尘机构;
2.根据权利要求1所述的一种移动机器人稳定运动结构,其特征在于:所述吸尘机构还包括:吸尘器(15)、吸尘软管(16)以及活动空心块(21),所述吸尘器(15)固定安装在所述机器人底壳(14)内壁上,所述吸尘器(15)的输出端固定套接有所述吸尘软管(16),所述活动空心块(21)的一端设置有接口(28),所述接口(28)与所述活动空心块(21)内部连通,所述活动空心块(21)另一端的开口处固定安装有嵌环体(22),所述吸尘圆筒(17)的一端设置有吸口(20),所述吸口(20)与活动空心块(21)的开口端嵌合连接,所述嵌环体(22)与开设在吸口(20)外壁上的环形槽嵌合,所述活动空心块(21)的内部固定安装有挡环(23),所述挡环(23)的一侧设置有密封垫(24),所述密封垫(24)与吸口(20)的端部接触;所述吸尘圆筒(17)的筒壁上均匀开设有若干个吸尘细孔(18)。
3.根据权利要求1所述的一种移动机器人稳定运动结构,其特征在于:所述机器人底壳(14)壁上开设有导向槽(19),所述导向槽(19)内穿过吸尘圆筒(17),所述吸尘圆筒(17)与导向槽(19)滑动连接。
4.根据权利要求2所述的一种移动机器人稳定运动结构,其特征在于:所述活动空心块(21)为方块型结构,所述活动空心块(21)上套设有定位导座(25),所述定位导座(25)上开设有活动槽(27),所述活动空心块(21)与所述活动槽(27)滑动连接,所述定位导座(25)的一端内座壁上固定安装有压力传感器(26),所述压力传感器(26)表面上覆盖有压盘(38),所述压盘(38)通过多个第一弹簧(37)与所述活动空心块(21)弹性连接,所述第一弹簧(37)的一端与所述压盘(38)的盘面固定连接,所述第一弹簧(37)的另一端与所述活动空心块(21)固定连接。
5.根据权利要求4所述的一种移动机器人稳定运动结构,其特征在于:所述定位导座(25)的一端固定安装有螺杆(29),所述螺杆(29)螺纹连接有螺纹管(30),所述螺纹管(30)上转动安装有多个固定架(31),所述固定架(31)固定安装在所述机器人底壳(14)的内壁上,所述螺纹管(30)的一端中部固定连接有圆轴(32)。
6.根据权利要求5所述的一种移动机器人稳定运动结构,其特征在于:所述圆轴(32)上套有蜗轮(33),所述蜗轮(33)啮合连接有蜗杆(34),所述蜗杆(34)的一端与第二轴体(7)的一端固定连接,所述蜗杆(34)的另一端与所述机器人底壳(14)壁转动安装。
7.根据权利要求6所述的一种移动机器人稳定运动结构,其特征在于:所述圆轴(32)远离螺纹管(30)的一端开设有圆孔,所述圆轴(32)贯穿开设在所述蜗轮(33)中部的圆孔,所述圆孔的孔壁上开设有圆环槽(39),所述圆环槽(39)内间隙配合有圆环块(46)。
8.根据权利要求7所述的一种移动机器人稳定运动结构,其特征在于:所述圆环块(46)的四周外壁上均匀开设有若干个第一导槽(40),所述圆环块(46)的内壁上均匀开设有若干个第二导槽(41),所述第一导槽(40)与所述第二导槽(41)连通,所述第二导槽(41)与圆孔连通,所述第一导槽(40)间隙配合连接有压块(42),所述压块(42)的一端与圆环槽(39)的槽壁接触,所述压块(42)的另一端固定连接有推块(43),所述推块(43)与第二导槽(41)间隙配合连接,且推块(43)穿过第二导槽(41),所述推块(43)远离压块(42)的一端设置斜面,所述第一导槽(40)的内部设置有多个第二弹簧(44),所述第二弹簧(44)的一端与第一导槽(40)的槽壁固定连接,所述第二弹簧(44)的另一端与压块(42)固定连接。
9.根据权利要求7所述的一种移动机器人稳定运动结构,其特征在于:所述圆孔内部设置有圆台块(45),所述圆轴(32)远离螺纹管(30)的一端设置有电动推杆(35),所述电动推杆(35)转动安装有座体(36),所述座体(36)与机器人底壳(14)的内壁固定连接,所述电动推杆(35)的输出轴端固定连接有圆台块(45)。
10.根据权利要求9所述的一种移动机器人稳定运动结构,其特征在于:所述圆台块(45)的侧面与推块(43)的斜面接触。
技术总结
本申请公开了一种移动机器人稳定运动结构,其包括:第一架体、电机、第二架体、第一轴体、第一齿轮、第三架体、第二轴体、第二齿轮、第三齿轮、第三轴体、第四齿轮、同步轮、同步带、机器人底壳、吸尘器、吸尘软管、吸尘圆筒、吸尘细孔、导向槽、吸口、活动空心块、嵌环体、挡环、密封垫、定位导座、压力传感器、活动槽、接口、螺杆、螺纹管、固定架、圆轴、蜗轮、蜗杆、电动推杆、座体、第一弹簧、压盘、圆环槽、第一导槽、第二导槽、压块、推块、第二弹簧、圆台块以及圆环块。本申请的有益之处在于增设了可进行同步带张力调节的吸尘机构,通过吸尘器提供吸尘的吸力,可使同步带表面粘附的灰尘进行吸除,进一步可实现同步带张力的调节。
技术研发人员:张丽萍
受保护的技术使用者:台州职业技术学院
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!