一种多清洁机器人清洁区域动态调整方法、设备及介质与流程
本发明涉及智能机器人,具体涉及一种多清洁机器人清洁区域动态调整方法、设备及介质。
背景技术:
1、机器人在人们的生产、生活中充当着越来越重要的角色,机器人的功能越来越强大,机器人面临的工作环境日益复杂,任务种类更加复杂和繁琐,单个机器人个体在处理这类任务时很难获得理想的效果,由此对机器人协同工作的研究和讨论随之展开,并且在很短的时间内成为机器人学的一个热点和重点研究领域。清洁机器人通过自主行走及清扫取代人工清洁活动,解放了人们的双手。随着清洁机器人的渗透普及,其工作场景已经从面积较小的家居环境逐渐拓展到面积大、情况复杂的商用环境,如大型商超、停车场等。商用场景由于清洁面积大,清洁情况复杂,仅依靠单台机器不足以高效便捷地完成清洁任务。于是,便有了多台机器同时执行清洁作业,共同完成同一区域的清洁任务。然而,机械地使用多台清洁机器人对大面积清洁并不能达到一加一大于二的作用,相反,由于没有明确的分工协作,会导致重复清扫、漏扫、甚至多台机器人互相干扰的情况,从而导致清洁效率低下。
技术实现思路
1、本发明为了克服以上技术的不足,提供了一种有效避免出现重复清扫、漏扫,可以协同完成作业区域的清洁任务的多清洁机器人清洁区域动态调整方法、设备及介质。
2、本发明克服其技术问题所采用的技术方案是:
3、一种多清洁机器人清洁区域动态调整方法,包括:
4、n台清洁机器人链接到同一局域网络中,n为大于等于2的正整数,每个清洁机器人本体中安装iros系统;
5、通过局域网络向各个清洁机器人分发该机器人所清扫区域的完整地图以及该机器人所清扫区域的边界信息;
6、同一域id下所有清洁机器人执行启动,启动后,各个清洁机器人的清洁区域覆盖全部地图,完成初始清洁区域构建;
7、每个清洁机器人通过定义的心跳频率将其状态和清扫边界发送给同一域id下的其它清洁机器人。
8、优选的,n台清洁机器人通过4g或5g或wifi链接到同一局域网络中。
9、优选的,n台清洁机器人安装的iros系统的版本相同。
10、进一步的,同一域id下所有清洁机器人执行启动的方法为:
11、一清洁机器人启动后,启动机器人动态信息同步节点,机器人动态信息同步节点周期获取清洁机器人状态和清扫边界,将获取的清洁机器人状态和清扫边界信息发送到指定话题/cleaning_robot_state中;
12、同一局域网络中其它清洁机器人从话题/cleaning_robot_state中获取到该域id下所有清洁机器人状态和清扫边界后,将该信息提交给该清洁机器人的任务规划模块,任务规划模块比较每个清洁机器人的清扫边界判断清扫区域是否覆盖全部地图。
13、进一步的,还包括:
14、当同一局域网络中一清洁机器人检测到自身出现异常时,该清洁机器人将异常信息发送到话题/cleaning_robot_state中,同一局域网络中其它清洁机器人订阅到对应的异常信息;
15、当同一局域网络中一清洁机器人因网络故障或节点退出无法向话题/cleaning_robot_state发送心跳信息或发送心跳信息超过规定时长时,同一局域网络中其它清洁机器人判定该清洁机器人异常;
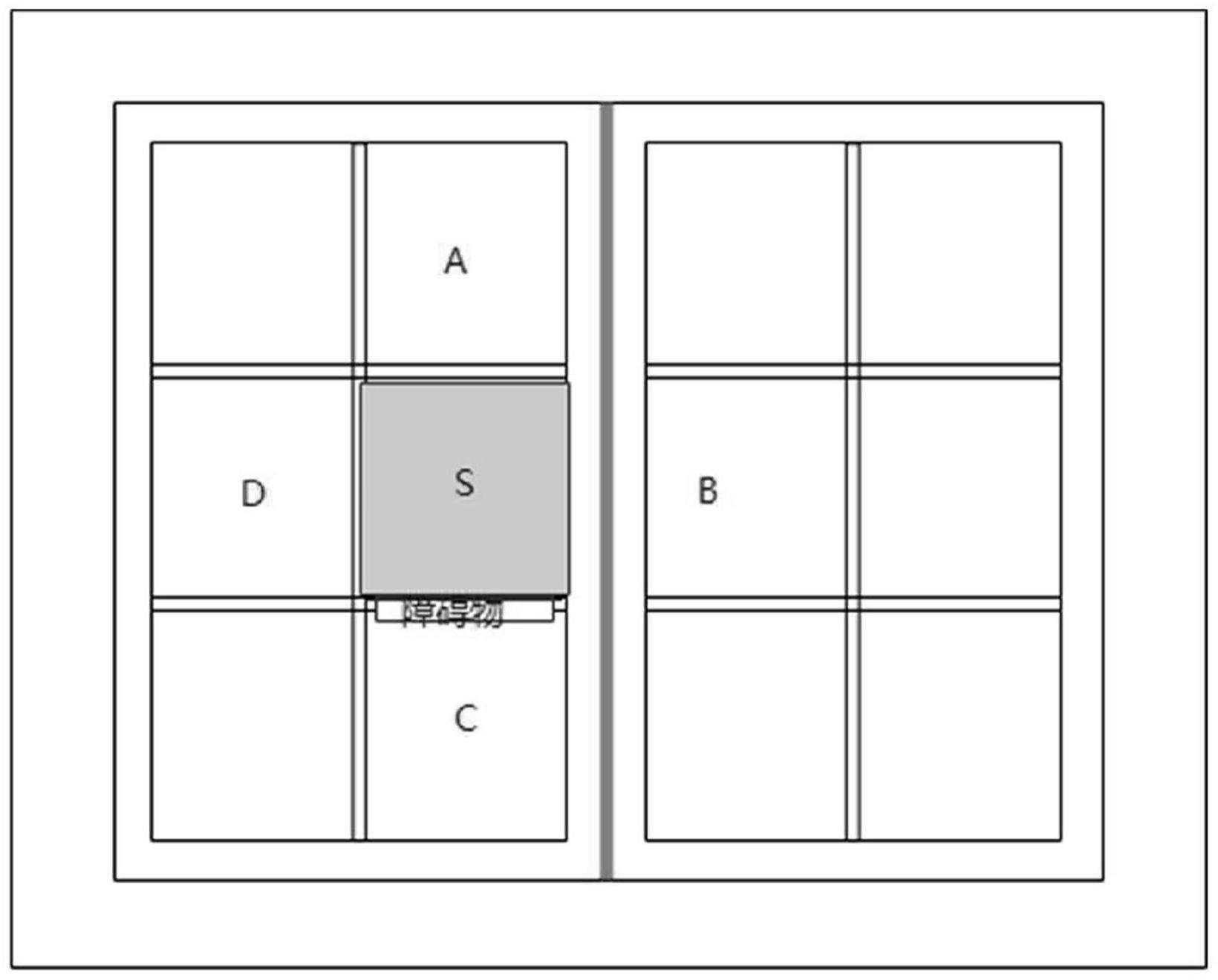
16、当同一局域网络中一清洁机器人退出时,同一局域网络中其它清洁机器人判断本机是否与退出的清洁机器人相邻,如果是则判断本机清扫区域与退出的清洁机器人是否没有禁行线,如果是则判断本机清扫区域边界线是否比退出的清洁机器人的清扫区域边界线长,如果是则判断本机slam是否能够规划到退出的清洁机器人清扫区域中心点的全局规划路径,如果是则该清洁机器人接管退出的清洁机器人的清洁区域。
17、进一步的,还包括:
18、当同一局域网络中多个清洁机器人满足一清洁区域的清扫条件时,该清洁区域的机器人进行清洁区域动态调整计算,将计算结果发送到话题/cleaning_robot_state中,该清洁区域的清洁机器人获取接管权,其它清洁区域订阅到该清洁区域机器人发送的话题后停止清洁区域动态调整计算。
19、进一步的,还包括:
20、同一局域网络中一清洁机器人接管退出的清洁机器人后,将调整后的本机状态信息和清扫边界周期性发送到话题/cleaning_robot_state中,同一局域网络中其它清洁机器人接收到话题信息后,更新自身维护的局域网络中清洁机器人清扫边界列表。
21、进一步的,还包括:
22、当故障清洁机器人维修完毕重新加入局域网络时,该清洁机器人将状态信息置为res,将状态信息res和清扫边界信息发送到话题/cleaning_robot_state中,接管机器人收到话题信息后,重新调整自身清扫区域,并将调整后的本机状态信息和清扫边界信息发送到话题/cleaning_robot_state中,该接管机器人清洁区域恢复初始状态。
23、一种多清洁机器人清洁区域动态调整设备,包括:
24、至少一个处理器,以及
25、与所述至少一个处理器通信连接的存储器;其中,所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够:
26、通过局域网络向各个清洁机器人分发该机器人所清扫区域的完整地图以及该机器人所清扫区域的边界信息;
27、同一域id下所有清洁机器人执行启动,启动后,各个清洁机器人的清洁区域覆盖全部地图,完成初始清洁区域构建;
28、每个清洁机器人通过定义的心跳频率将其状态和清扫边界发送给同一域id下的其它清洁机器人。
29、一种非易失性计算机存储介质,存储有计算机可执行指令,所述计算机可执行指令设置为:
30、通过局域网络向各个清洁机器人分发该机器人所清扫区域的完整地图以及该机器人所清扫区域的边界信息;
31、同一域id下所有清洁机器人执行启动,启动后,各个清洁机器人的清洁区域覆盖全部地图,完成初始清洁区域构建;
32、每个清洁机器人通过定义的心跳频率将其状态和清扫边界发送给同一域id下的其它清洁机器人。
33、本发明的有益效果是:多个清洁机器人清洁通过区域动态调整方法能够避免出现重复清扫、漏扫,协同完成作业区域的清洁任务,解决了现有技术中多台清洁机器人执行清洁作业时清洁效率低下的技术问题。
技术特征:
1.一种多清洁机器人清洁区域动态调整方法,其特征在于,包括:
2.根据权利要求1所述的多清洁机器人清洁区域动态调整方法,其特征在于:n台清洁机器人通过4g或5g或wifi链接到同一局域网络中。
3.根据权利要求1所述的多清洁机器人清洁区域动态调整方法,其特征在于:n台清洁机器人安装的iros系统的版本相同。
4.根据权利要求1所述的多清洁机器人清洁区域动态调整方法,其特征在于,同一域id下所有清洁机器人执行启动的方法为:
5.根据权利要求4所述的多清洁机器人清洁区域动态调整方法,其特征在于,还包括:
6.根据权利要求4所述的多清洁机器人清洁区域动态调整方法,其特征在于,还包括:
7.根据权利要求5所述的多清洁机器人清洁区域动态调整方法,其特征在于,还包括:
8.根据权利要求5所述的多清洁机器人清洁区域动态调整方法,其特征在于,还包括:
9.一种多清洁机器人清洁区域动态调整设备,其特征在于,包括:
10.一种非易失性计算机存储介质,存储有计算机可执行指令,所述计算机可执行指令设置为:
技术总结
一种多清洁机器人清洁区域动态调整方法、设备及介质,涉及智能机器人技术领域,机器人动态信息同步节点负责周期获取清洁机器人状态信息和清扫边界,并将该状态信息和边界信息发送到指定话题;机器人清洁区域动态分配节点负责当组网内清洁机器人出现退出情况时,进行清洁任务的再分配和清扫边界的动态调整。通过清洁机器人动态组网既可以避免多台清洁机器人之间的相互干扰,也可以避免因为某台清洁机器人退出导致的漏扫。
技术研发人员:刘鹏,黄洋,程瑶,王怀震,马辰,南国
受保护的技术使用者:山东新一代信息产业技术研究院有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!