自动清洁设备和清洁机器人系统的制作方法
本公开涉及智能家居,尤其涉及一种基站和一种清洁机器人系统。
背景技术:
1、随着技术的迭代更新与发展,自清洁设备已经进入到普通家庭生活当中,如并逐渐实现了普及。在当前的自清洁设备中,有一种具备了拖地的功能,如拖地机器人或扫拖一体机,但因其拖地组件无法实现自驱动的升降,致使在自清洁设备清扫的过程中,在一些不需要拖地的场景,无法做到区分策略的处理,影响了自清洁设备的清洁性能,降低了清洁效率和使用体验。
技术实现思路
1、在
技术实现要素:
部分中引入了一系列简化形式的概念,这将在具体实施方式部分中进一步详细说明。本公开的此部分并不意味着要试图限定出所要求保护的技术方案的关键特征和必要技术特征,更不意味着试图确定所要求保护的技术方案的保护范围。
2、本公开第一方面的实施例,提供了一种自动清洁设备,包括:机器主体、以及与机器主体连接的清洁组件,清洁组件包括驱动部、传动装置和清洁元件,驱动部通过传动装置驱动清洁元件的升降和旋转。
3、进一步地,传动装置包括:传动杆,传动杆与驱动部连接,传动杆上设置有丝杠和传动轮;第一传动组件,传动连接丝杠和清洁元件,传动杆旋转,通过丝杠带动第一传动组件运动以使清洁元件旋转;第二传动组件,传动连接传动轮和清洁元件,传动杆旋转,通过传动轮带动第二传动组件运动以使清洁元件升降。
4、进一步地,第一传动组件包括第一齿轮和第二齿轮,第一齿轮与丝杠动力连接,并与第二齿轮啮合;传动装置还包括与清洁元件连接的套筒,套筒与第二齿轮连接;其中,丝杠旋转带动第一齿轮转动,通过第二齿轮带动套筒旋转以使清洁元件旋转。
5、进一步地,第一齿轮包括第一斜齿部和第一直齿部,第一斜齿部与丝杠啮合,第一直齿部与第二齿轮啮合。
6、进一步地,第二齿轮沿轴向开设有贯穿孔,套筒穿设于贯穿孔与第二传动组件转动连接,以使第二传动组件能够带动套筒相对于第二齿轮沿轴向运动;其中,贯穿孔的内壁设置有限位部,套筒的外壁设置有定位部,限位部和定位部相适配以对套筒相对于第二齿轮的转动进行限制。
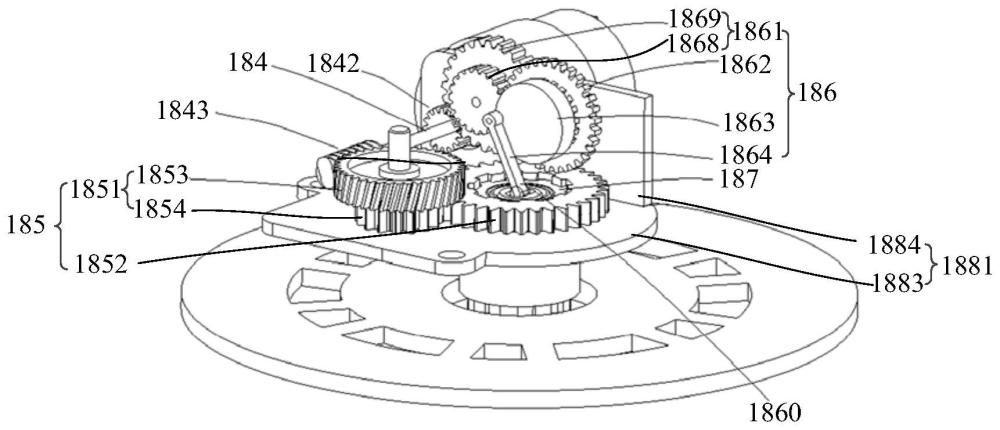
7、进一步地,第二传动组件包括:第三齿轮、第四齿轮、第五齿轮和连杆,第三齿轮与传动轮啮合,并与第四齿轮啮合,第四齿轮和第五齿轮同轴设置并可动力连接,连杆的第一端偏心铰接在第五齿轮上,连杆的第二端与套筒活动连接;其中,传动轮转动,通过第三齿轮带动第四齿轮转动,第五齿轮转动带动连杆运动以使套筒在贯穿孔内相对于第二齿轮升降运动。
8、进一步地,清洁组件还包括:离合机构,连接第四齿轮和第五齿轮之间;其中,离合机构处于接合状态能够使第四齿轮与第五齿轮动力连接,离合机构处于分离状态能够使第四齿轮与第五齿轮动力分离。
9、进一步地,第二传动组件还包括穿设于第四齿轮和第五齿轮的连接轴,第四齿轮滑动地设置在连接轴上,第五齿轮与连接轴连接;离合机构包括定离合齿和动离合齿,定离合齿设置在第五齿轮远离连杆的端面上,动离合齿设置在第四齿轮的端面上;其中,第四齿轮为第一斜齿轮,第三齿轮包括与第四齿轮啮合连接的第二斜齿部,第三齿轮在一个方向上转动能够使第四齿轮带动动离合齿向远离定离合齿的方向移动以使动离合齿和定离合齿分离,第三齿轮在另外一个方向上转动能够使第四齿轮带动动离合齿向靠近定离合齿的方向移动以使动离合齿和定离合齿接合。
10、进一步地,第三齿轮还包括与传动轮啮合连接的第二直齿部,第二直齿部和连杆位于第二斜齿部的两侧。
11、进一步地,第二传动组件还包括:轴承,连杆的第二端通过轴承与套筒连接,且连杆的第二端铰接于轴承。
12、进一步地,自动清洁设备还包括:齿轮箱,齿轮箱与机器主体连接,传动杆和套筒穿设于齿轮箱,驱动部和清洁元件位于齿轮箱的外部,第一传动组件、第二传动组件位于齿轮箱的内部。
13、进一步地,齿轮箱包括可拆卸连接的底座和上盖,底座包括底板和侧板,第一齿轮和第二齿轮设置在底座上,传动杆穿设于侧板,第三齿轮和连接轴设置在侧板上,套筒穿设于底板、第二齿轮与连杆连接。
14、进一步地,自动清洁设备还包括:位置检测装置,设置在机器主体和/或清洁元件上,用于检测清洁元件的上升位置,驱动部根据位置检测装置的检测结果转动或停止转动。
15、本公开第二方面的实施例,提供了一种清洁机器人系统,包括:基站;以及第一方面中任一项的自动清洁设备,自动清洁设备适于停靠至基站上。
16、根据本公开实施例所提供的自清洁设备和清洁机器人系统,自清洁设备包括具有拖地功能的清洁组件,清洁组件与机器主体连接,包括驱动部、传动装置和清洁元件,驱动部通过传动装置驱动清洁元件的升降和旋转,由此,可以根据清洁元件是否与待清洁表面接触的需求,通过驱动部和传动装置,即可实现清洁元件的升降和旋转操作,以满足清洁元件的不同功能需求,即能够实现清洁元件的区分策略的处理,提高了自清洁设备的清洁性能,提高了清洁效率和使用体验。同时,本实施例中的清洁组件,利用一个驱动部,通过传动装置即可驱动清洁元件的升降和旋转,与相关技术中需要利用两个驱动部分别驱动清洁元件升降和旋转相比,简化了一个驱动部的设置,由此,能够满足清洁组件结构紧凑、体积较小的设计需求,有利于减小清洁组件的占用空间,且降低成本,适于推广应用。
17、上述说明仅是本公开技术方案的概述,为了能够更清楚了解本公开的技术手段,而可依照说明书的内容予以实施,并且为了让本公开的上述和其它目的、特征和优点能够更明显易懂,以下特举本公开的具体实施方式。
技术特征:
1.一种自动清洁设备(100),其特征在于,包括:
2.根据权利要求1所述的自动清洁设备(100),其特征在于,所述传动装置(182)包括:
3.根据权利要求2所述的自动清洁设备(100),其特征在于,
4.根据权利要求3所述的自动清洁设备(100),其特征在于,
5.根据权利要求3所述的自动清洁设备(100),其特征在于,
6.根据权利要求5所述的自动清洁设备(100),其特征在于,所述第二传动组件(186)包括:
7.根据权利要求6所述的自动清洁设备(100),其特征在于,所述清洁组件(180)还包括:
8.根据权利要求7所述的自动清洁设备(100),其特征在于,
9.根据权利要求8所述的自动清洁设备(100),其特征在于,
10.一种清洁机器人系统,其特征在于,包括:
技术总结
本公开提供了一种自动清洁设备和清洁机器人系统。其中,自动清洁设备包括:机器主体、以及与机器主体连接的清洁组件,清洁组件包括驱动部、传动装置和清洁元件,驱动部通过传动装置驱动清洁元件的升降和旋转。由此,可以根据清洁元件是否与待清洁表面接触的需求,通过驱动部和传动装置,实现清洁元件的升降和旋转操作,以满足清洁元件的不同功能需求,实现了清洁元件的区分策略的处理,提高了自清洁设备的清洁性能,提高了清洁效率和使用体验,同时,利用一个驱动部,通过传动装置即可驱动清洁元件的升降和旋转,能够满足清洁组件结构紧凑、体积较小的设计需求,有利于减小清洁组件的占用空间,且降低成本。
技术研发人员:陈泽
受保护的技术使用者:北京石头世纪科技股份有限公司
技术研发日:
技术公布日:2024/5/8
- 还没有人留言评论。精彩留言会获得点赞!