基于线激光传感器和激光雷达的机器人避障方法与流程
本申请涉及机器人避障的,具体涉及基于线激光传感器和激光雷达的机器人避障方法。
背景技术:
1、目前大多数扫地机不具备主动避障的功能,单单使用碰撞传感器避障容易撞花家具或推着小障碍物走;实现避障功能的扫地机往往需要在多个侧面安装线激光模组配合(例如机体两侧分别安装至少一个)实现实时数据避障绕障,导致成本较高,而且每一种传感器都有自身的局限性,比如探测范围和有效视角等,导致线激光模组会随着安装高度的不同而产生大小不同的检测盲区。
技术实现思路
1、本申请公开基于线激光传感器和激光雷达的机器人避障方法,具体的技术方案如下:
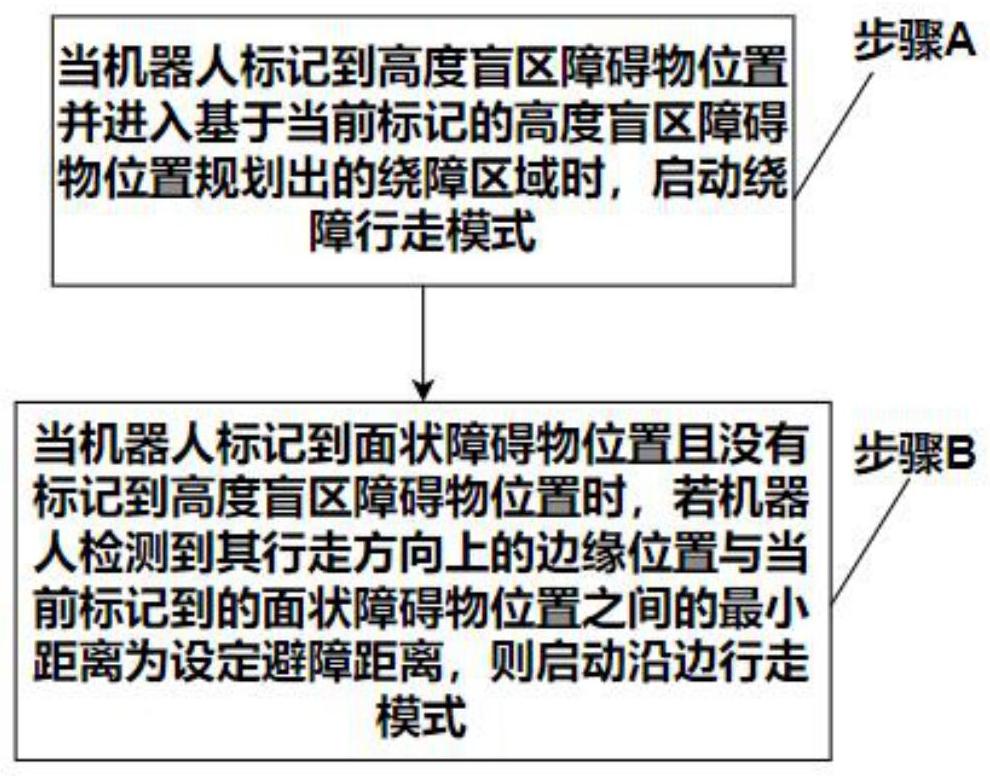
2、基于线激光传感器和激光雷达的机器人避障方法,其特征在于,机器人的机体前侧安装线激光传感器,机器人的机体顶部安装激光雷达,所述激光雷达在机体中的安装高度大于所述线激光传感器在机体中的安装高度;所述机器人避障方法包括:步骤a、当机器人标记到高度盲区障碍物位置并进入基于当前标记的高度盲区障碍物位置规划出的绕障区域时,启动绕障行走模式,其中,高度盲区障碍物位置是机器人利用线激光传感器采集的点云数据标记出来;步骤b、当机器人标记到面状障碍物位置且没有标记到高度盲区障碍物位置时,若机器人检测到其行走方向上的边缘位置与当前标记到的面状障碍物位置之间的最小距离为设定避障距离,则启动沿边行走模式;其中,面状障碍物位置是机器人利用线激光传感器采集的点云数据和激光雷达采集的点云数据共同标记出来。
3、通过执行上述步骤a和步骤b,本申请根据所述线激光传感器扫描的点云数据以及对应标记出的障碍物位置来判断机器人与墙面之间是否存在矮小的障碍物,即确认是否存在高度盲区障碍物位置所在的障碍物,若存在则机器人进行避障,对高度盲区障碍物位置所在的障碍物进行绕障行走,实现机器人绕障导航;若无则机器人沿着面状障碍物位置所在的障碍物的轮廓行走,可以是沿墙体行进,进而在保证机器人沿直墙行走且与墙面保持一定间距的前提下对较矮的障碍物进行有效避障,实现机器人实时沿边避障,保证清扫覆盖率。
4、而且,所述机器人避障方法是使用机体前侧的一个线激光传感器配合机顶的激光雷达,可以扫描具有一定高度的障碍物,且不会忽略矮小障碍物,使扫描过程中的盲区减小,实现低矮障碍物绕障,高障碍物激光沿边,与现有技术相比,不用在机体侧边安装线激光传感器,降低了算法难度和制造成本,也保证机器人避障操作的正常运行。
技术特征:
1.基于线激光传感器和激光雷达的机器人避障方法,其特征在于,机器人的机体前侧安装线激光传感器,机器人的机体顶部安装激光雷达,所述激光雷达在机体中的安装高度大于所述线激光传感器在机体中的安装高度;
2.根据权利要求1所述机器人避障方法,其特征在于,启动沿边行走模式或启动绕障行走模式之前,存在:
3.根据权利要求2所述机器人避障方法,其特征在于,机器人将激光雷达采集的点云数据转换到机器人坐标系中的高度信息是不同于机器人将线激光传感器采集的点云数据转换到同一机器人坐标系中的高度信息,以使线激光传感器在机体中的安装位置是基于激光雷达的扫描盲区确定。
4.根据权利要求3所述机器人避障方法,其特征在于,机器人基于激光雷达坐标系与机器人坐标系之间的转换矩阵,将激光雷达采集的点云数据转换到机器人坐标系下,得到第一点云数据;然后机器人在第一点云数据当中筛选出障碍物扫描高度大于或等于预设盲区高度的点云占据的二维坐标位置,再将从第一点云数据当中筛选出的二维坐标位置标记为第一特定高度障碍物位置;
5.根据权利要求4所述机器人避障方法,其特征在于,机器人将第一特定高度障碍物位置中所包括的面状障碍物位置处的障碍物扫描高度标记为面状障碍物位置处的第一扫描高度,还将第二特定高度障碍物位置中所包括的面状障碍物位置处的障碍物扫描高度标记为面状障碍物位置处的第二扫描高度;
6.根据权利要求5所述机器人避障方法,其特征在于,机器人在步骤b中启动的沿边行走模式包括:
7.根据权利要求4所述机器人避障方法,其特征在于,步骤a包括:
8.根据权利要求7所述机器人避障方法,其特征在于,在机器人无法基于预先标记出的高度盲区障碍物位置规划出绕障区域或没有标记出高度盲区障碍物位置的情况下,若第一特定高度障碍物位置或面状障碍物位置与机器人在其行走方向上的边缘位置之间的最小距离变小,直至当前扫描到的第一特定高度障碍物位置或面状障碍物位置与机器人的行走方向上的边缘位置之间的最小距离为设定避障距离,则启动步骤b所述沿边行走模式。
9.根据权利要求7所述机器人避障方法,其特征在于,在步骤a3中,机器人沿着所述绕障区域的边缘行走至一个位置处,若线激光传感器的扫描区域在机器人的行走平面中覆盖到步骤a1所述的绕障区域之外的至少一个所述高度盲区障碍物位置或多个所述高度盲区障碍物位置,则通过执行步骤a1来标记出新的绕障区域及规划出新的参考扫描盲区,同时机器人继续沿着上一次步骤a1中标记的绕障区域的边缘行走,然后执行步骤a2,以使机器人在行走至其机体覆盖区域与所述新的绕障区域相交的情况下,机器人通过调整位姿来沿着所述新的绕障区域的边缘行走。
10.根据权利要求9所述机器人避障方法,其特征在于,在步骤a1中,所述机器人基于预先标记出的高度盲区障碍物位置规划出绕障区域的方法包括:机器人将包围步骤a1所述的预先标记出的高度盲区障碍物位置的最小圆形区域标记为绕障区域;
11.根据权利要求10所述机器人避障方法,其特征在于,机器人在步骤a1中将机体中心与所述绕障区域的圆心之间的距离设置为使机器人的机体边缘不与所述第二特定高度障碍物位置相接触。
12.根据权利要求11所述机器人避障方法,其特征在于,在步骤a1中,结合线激光传感器的扫描区域与所述绕障区域,机器人规划出参考扫描盲区的方法包括:
13.根据权利要求12所述机器人避障方法,其特征在于,机器人将所述参考扫描盲区的半径设置为大于所述绕障区域的半径,还将所述参考扫描盲区的边缘与所述绕障区域的边缘之间的环形区域的内径设置为大于或等于机器人的机体半径;
14.根据权利要求13所述机器人避障方法,其特征在于,在所述步骤a2中,机器人沿着绕障区域的边缘行走,以带动线激光传感器的扫描区域进入所述参考扫描盲区的方法包括:
技术总结
本申请公开基于线激光传感器和激光雷达的机器人避障方法,所述机器人避障方法包括:步骤A、当机器人标记到高度盲区障碍物位置并进入基于当前标记的高度盲区障碍物位置规划出的绕障区域时,启动绕障行走模式,其中,高度盲区障碍物位置是机器人利用线激光传感器采集的点云数据标记出来;步骤B、当机器人标记到面状障碍物位置且没有标记到高度盲区障碍物位置时,若机器人检测到其行走方向上的边缘位置与当前标记到的面状障碍物位置之间的最小距离为设定避障距离,则启动沿边行走模式;其中,面状障碍物位置是机器人利用线激光传感器采集的点云数据和激光雷达采集的点云数据共同标记出来。
技术研发人员:陈泽鑫,陈卓标,周和文
受保护的技术使用者:珠海一微半导体股份有限公司
技术研发日:
技术公布日:2025/1/13
- 还没有人留言评论。精彩留言会获得点赞!