一种用于幕墙的清洁机器人的制作方法
本发明涉及清洁装置,具体涉及一种用于幕墙的清洁机器人。
背景技术:
1、玻璃幕墙是温室的外墙围护,不承重,像幕布一样挂上去,它能够投射阳光,给温室带来较好的光照效果。为了提高玻璃幕墙的光照效果,玻璃幕墙的表面需要定期进行清洁,现有清洁的技术手段有两种,一种是通过人工擦拭,这种操作,工作量大,工作效率低,同时,危险性高;另一种是通过机器人进行清洁,现有的机器人如图1所示,包过智能机体,与智能机体连接的清洁装置,以及与智能机体连接的移动吸附装置,现有的机器人虽然取代了人工清洁,提高了清洁工作的安全性,但是,操作复杂,使用成本高,难以广泛推广使用。因此,现在亟需一种结构简单,使用方便,使用成本低的机器人来代替人工完成玻璃幕墙的清洁工作。
技术实现思路
1、为解决上述问题,尤其是针对现有技术所存在的不足,本发明提供了一种用于幕墙的清洁机器人能够解决上述问题。
2、为实现上述目的,本发明采用以下技术手段:
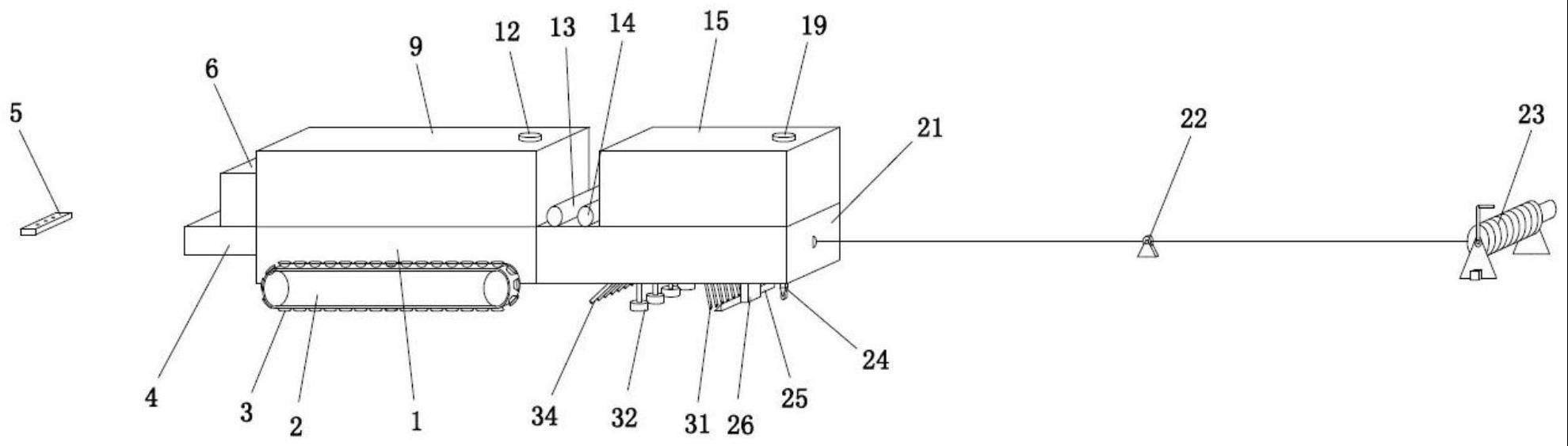
3、一种用于幕墙的清洁机器人,包括移动车体,所述移动车体驱动连接有履带轮,所述履带轮的外侧面连接有多组均匀分布的吸附盘,所述移动车体的一侧连接有移动电源、智能控制器、无线接收器,所述智能控制器通过无线接收器无线连接有无线控制器,所述移动车体的另一侧连接有辅助载体,所述移动车体的顶部连接有水箱,所述辅助载体的顶部连接有抽水泵、吸附泵、污水箱,所述辅助载体远离移动车体的侧部连接有卷线轮,所述辅助载体的底部连接有脚轮、刮板、吸污管、转动电机、喷水管,所述吸污管通过吸附泵与污水箱连接,所述转动电机的传动端连接有毛刷,所述喷水管通过抽水泵与水箱连接,所述移动车体、智能控制器、抽水泵、吸附泵、转动电机分别与移动电源电连接,所述移动车体、抽水泵、吸附泵、转动电机分别与智能控制器控制连接。
4、本发明进一步的方案为,所述移动车体的顶部开设有第一插槽,所述水箱的底部连接有第一插接块,所述第一插接块与第一插槽插接,所述水箱的侧部连接有第一观察窗,所述水箱的顶部连接有水箱盖,所述水箱的底部一侧与抽水泵连接。
5、本发明进一步的方案为,所述智能控制器为jetsonorinnx型号的控制器。
6、本发明进一步的方案为,所述辅助载体的顶部开设有第二插槽,所述污水箱的底部连接有第二插接块,所述第二插接块与第二插槽插接,所述污水箱的侧部连接有第二观察窗,所述污水箱的顶部连接有污水箱盖,所述污水箱的顶部一侧与吸附泵连接。
7、本发明进一步的方案为,所述污水箱的底部一侧连接有排污管。
8、本发明进一步的方案为,所述卷线轮缠绕的牵引线通过导向轮与辅助载体连接。
9、本发明进一步的方案为,所述卷线轮包括电动卷线轮、与电动卷线轮控制连接的线轮控制器,所述线轮控制器通过无线接收器与智能控制器连接。
10、本发明进一步的方案为,所述辅助载体的底部开设有移动槽,所述移动槽内滑动插接有支撑杆,所述支撑杆的底部与刮板连接,所述移动槽的顶部开设有导向槽,所述导向槽内滑动插接有导杆,所述导杆的底部与支撑杆的顶部连接,所述导杆的外侧套接有压缩弹簧,所述压缩弹簧的一端与移动槽的内壁连接,所述压缩弹簧的另一端与支撑杆连接。
11、本发明进一步的方案为,所述刮板为橡胶制品。
12、本发明进一步的方案为,所述压缩弹簧为弹力钢制品。
13、本发明的有益效果:
14、1、本发明由移动车体、履带轮、吸附盘、移动电源、无线控制器、智能控制器、无线接收器、水箱、抽水泵、吸附泵、污水箱、辅助载体、脚轮、刮板、吸污管、毛刷、转动电机、喷水管组成,上述结构均为常见通用结构,结构简单,使用成本低;移动车体通过履带轮的吸附盘在幕墙上移动,喷水管通过抽水泵喷出水箱内的水对幕墙进行清洗,毛刷通过转动电机转动对幕墙进行擦拭;刮板通过移动车体的带动刮取擦拭产生的污水,吸污管通过吸附泵把污水集中到污水箱内,整个控制过程操作方便,使用简单,通过上述设置能够有效代替人工完成玻璃幕墙的清洁工作,易推广。
15、2、本发明的移动车体通过辅助载体连接有卷线轮,卷线轮能够牵引移动车体工作,从而有效提高机器人使用时的安全性,有效提高机器人的使用寿命。
技术特征:
1.一种用于幕墙的清洁机器人,其特征在于,包括移动车体(1),所述移动车体(1)驱动连接有履带轮(2),所述履带轮(2)的外侧面连接有多组均匀分布的吸附盘(3),所述移动车体(1)的一侧连接有移动电源(4)、智能控制器(6)、无线接收器(7),所述智能控制器(6)通过无线接收器(7)无线连接有无线控制器(5),所述移动车体(1)的另一侧连接有辅助载体(21),所述移动车体(1)的顶部连接有水箱(9),所述辅助载体(21)的顶部连接有抽水泵(13)、吸附泵(14)、污水箱(15),所述辅助载体(21)远离移动车体(1)的侧部连接有卷线轮(23),所述辅助载体(21)的底部连接有脚轮(24)、刮板(25)、吸污管(31)、转动电机(33)、喷水管(34),所述吸污管(31)通过吸附泵(14)与污水箱(15)连接,所述转动电机(33)的传动端连接有毛刷(32),所述喷水管(34)通过抽水泵(13)与水箱(9)连接,所述移动车体(1)、智能控制器(6)、抽水泵(13)、吸附泵(14)、转动电机(33)分别与移动电源(4)电连接,所述移动车体(1)、抽水泵(13)、吸附泵(14)、转动电机(33)分别与智能控制器(6)控制连接。
2.根据权利要求1所述的一种用于幕墙的清洁机器人,其特征在于,所述移动车体(1)的顶部开设有第一插槽(8),所述水箱(9)的底部连接有第一插接块(10),所述第一插接块(10)与第一插槽(8)插接,所述水箱(9)的侧部连接有第一观察窗(11),所述水箱(9)的顶部连接有水箱盖(12),所述水箱(9)的底部一侧与抽水泵(13)连接。
3.根据权利要求1所述的一种用于幕墙的清洁机器人,其特征在于,所述智能控制器(6)为jetsonorinnx型号的控制器。
4.根据权利要求1所述的一种用于幕墙的清洁机器人,其特征在于,所述辅助载体(21)的顶部开设有第二插槽(20),所述污水箱(15)的底部连接有第二插接块(16),所述第二插接块(16)与第二插槽(20)插接,所述污水箱(15)的侧部连接有第二观察窗(17),所述污水箱(15)的顶部连接有污水箱盖(19),所述污水箱(15)的顶部一侧与吸附泵(14)连接。
5.根据权利要求4所述的一种用于幕墙的清洁机器人,其特征在于,所述污水箱(15)的底部一侧连接有排污管(18)。
6.根据权利要求1所述的一种用于幕墙的清洁机器人,其特征在于,所述卷线轮(23)缠绕的牵引线通过导向轮(22)与辅助载体(21)连接。
7.根据权利要求6所述的一种用于幕墙的清洁机器人,其特征在于,所述卷线轮(23)包括电动卷线轮(231)、与电动卷线轮(231)控制连接的线轮控制器(232),所述线轮控制器(232)通过无线接收器(7)与智能控制器(6)连接。
8.根据权利要求1所述的一种用于幕墙的清洁机器人,其特征在于,所述辅助载体(21)的底部开设有移动槽(27),所述移动槽(27)内滑动插接有支撑杆(26),所述支撑杆(26)的底部与刮板(25)连接,所述移动槽(27)的顶部开设有导向槽(30),所述导向槽(30)内滑动插接有导杆(28),所述导杆(28)的底部与支撑杆(26)的顶部连接,所述导杆(28)的外侧套接有压缩弹簧(29),所述压缩弹簧(29)的一端与移动槽(27)的内壁连接,所述压缩弹簧(29)的另一端与支撑杆(26)连接。
9.根据权利要求8所述的一种用于幕墙的清洁机器人,其特征在于,所述刮板(25)为橡胶制品。
10.根据权利要求8所述的一种用于幕墙的清洁机器人,其特征在于,所述压缩弹簧(29)为弹力钢制品。
技术总结
本发明公开一种用于幕墙的清洁机器人,包括移动车体,移动车体驱动连接有履带轮,履带轮连接有吸附盘,移动车体连接有移动电源、智能控制器、无线接收器、水箱、辅助载体,智能控制器连接有无线控制器,辅助载体连接有抽水泵、吸附泵、污水箱、卷线轮、脚轮、刮板、吸污管、转动电机、喷水管。有益效果:结构简单,使用成本低,操作方便,使用简单,有效代替人工完成玻璃幕墙的清洁工作,易推广;有效提高机器人的安全性、使用寿命。
技术研发人员:李国权,李付华
受保护的技术使用者:亿昌机器人科技(台州市)有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!