一种自动洗碗机的控制方法以及系统与流程
本发明涉及餐具洗涤设备,尤其是涉及一种自动洗碗机的控制方法以及系统。
背景技术:
1、随着自动化技术的飞速发展,各种传统的手工业已经慢慢逐步被半自动或者全自动机械化设备所代替,这样不但可以减少劳动力,还可以极大的提高工作效率。
2、家庭、酒店和饭馆每天都会有大量的筷子、碗、杯子和盘子等清洗对象需要洗涤,一般情况下,大部分的洗涤操作都是采用人工以及自动化清洗设备(洗碗机)的方式,首先需要人为将不同餐具进行分离作初步清理处理,然后通过自动化清洗设备(洗碗机)作统一清洗。
3、针对上述中的相关技术,发明人发现存在有如下缺陷:人为分离餐具的工作效率低下,而且容易出错,较为麻烦。
技术实现思路
1、为了提高了餐具的分类效率,使餐具的初步清理效率提高,间接提高了整体的餐具清洗效率以及效果,本申请提供一种自动洗碗机的控制方法以及系统。
2、第一方面,本申请提供一种自动洗碗机的控制方法,采用如下的技术方案:
3、一种自动洗碗机的控制方法,包括:
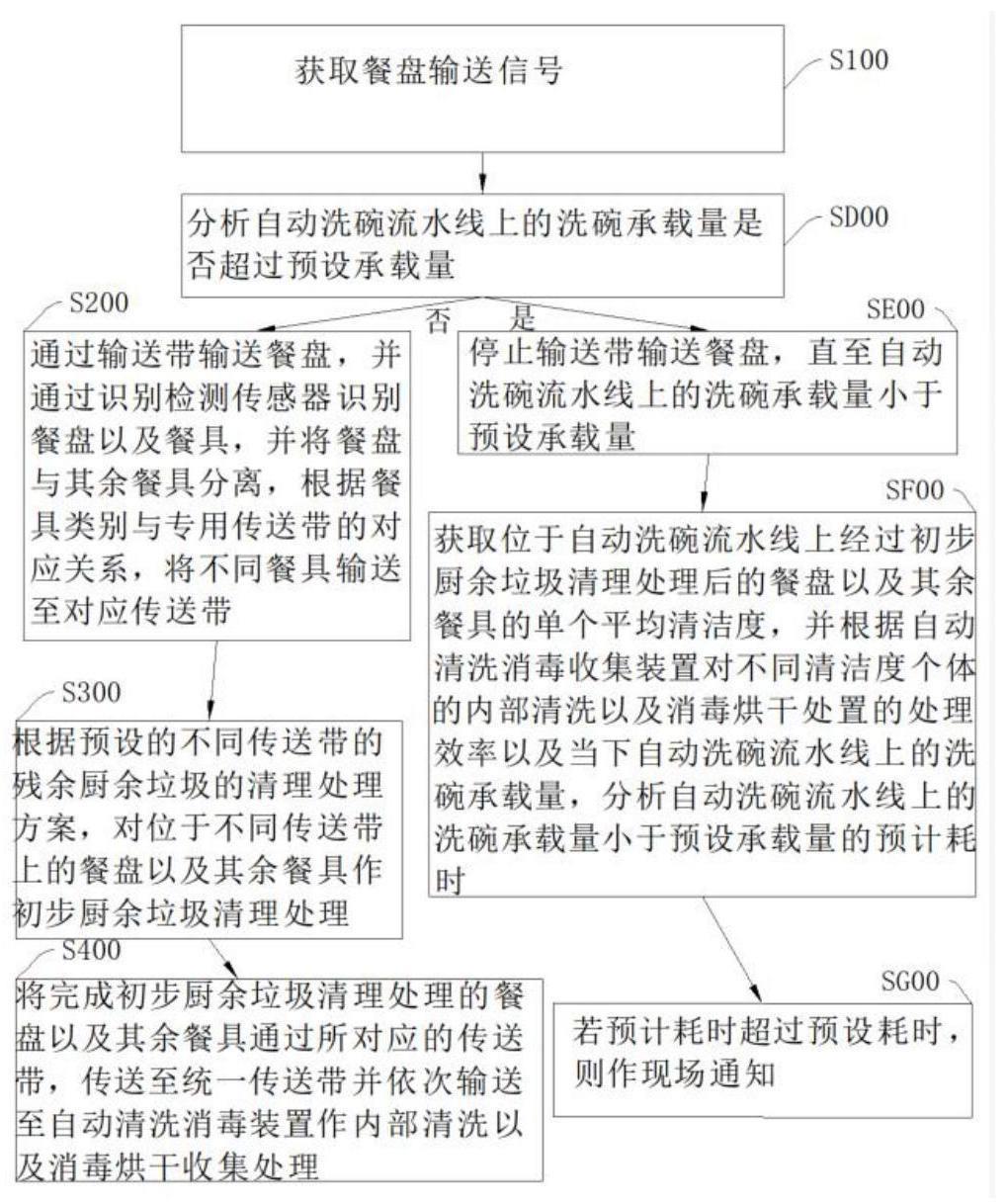
4、获取餐盘输送信号;
5、分析自动洗碗流水线上的洗碗承载量是否超过预设承载量,其中,自动洗碗流水线包括输送带、传送带、自动翻转分离除渣装置以及自动清洗消毒收集装置;
6、若为否,则通过输送带输送餐盘,并通过识别检测传感器识别餐盘以及餐具,并将餐盘与其余餐具分离,根据餐具类别与专用传送带的对应关系,将不同餐具输送至对应传送带;
7、根据预设的不同传送带的残余厨余垃圾的清理处理方案,对位于不同传送带上的餐盘以及其余餐具作初步厨余垃圾清理处理;
8、将完成初步厨余垃圾清理处理的餐盘以及其余餐具通过所对应的传送带,传送至统一传送带并依次输送至自动清洗消毒收集装置作内部清洗以及消毒烘干收集处理;
9、若为是,则停止输送带输送餐盘,直至自动洗碗流水线上的洗碗承载量小于预设承载量;
10、获取位于自动洗碗流水线上经过初步厨余垃圾清理处理后的餐盘以及其余餐具的单个平均清洁度,并根据自动清洗消毒收集装置对不同清洁度个体的内部清洗以及消毒烘干处置的处理效率以及当下自动洗碗流水线上的洗碗承载量,分析自动洗碗流水线上的洗碗承载量小于预设承载量的预计耗时;
11、若预计耗时超过预设耗时,则作现场通知。
12、可选的,将餐盘与其余餐具分离包括:
13、分析餐盘上是否有其余餐具;
14、若为是,则通过高度检测传感器检测获取餐盘在输送带上的高度值,并以高度值以及预设的安全间隔差值的和,作为隔离挡板与输送带的间隔高度,并根据所分析确定的间隔高度对隔离挡板作高度调节;
15、餐盘通过输送带直接通过隔离挡板下方,隔离挡板将所接触的位于餐盘上的其余餐具移动至其余传送带;
16、若为否,则控制隔离挡板的高度调至超过餐盘输送带上的高度值,餐盘通过隔离挡板下方。
17、可选的,根据预设的不同传送带的残余厨余垃圾的清理处理方案,对位于不同传送带上的餐盘以及其余餐具作初步厨余垃圾清理处理包括:
18、若为餐盘的专用传送带,则在传送餐盘期间使餐盘按照预设倾斜轨迹作倾斜设置,且通过位置检测传感器实时检测餐盘的位置同步控制位于传送带旁侧的冲洗装置对餐盘内的厨余垃圾作冲洗,从而使餐盘内的厨余垃圾在冲洗以及倾斜的共同作用下倒入至位于设置于专用传送带下方以及旁侧的垃圾回收装置内。
19、可选的,同步控制位于传送带旁侧的冲洗装置对餐盘内的厨余垃圾作冲洗包括:
20、获取餐盘上所分布的厨余垃圾;
21、根据厨余垃圾的粘附能力与冲洗装置冲洗水压强度要求的对应关系、所获取的餐盘上所分布的厨余垃圾,分析所需的最大水压强度要求,并控制冲洗装置冲洗餐盘内的厨余垃圾。
22、可选的,分析所需的最大水压强度要求,并控制冲洗装置冲洗餐盘内的厨余垃圾包括:
23、根据餐盘上不同位置分布的厨余垃圾的粘附能力,按照粘附能力由高至低对冲洗顺序进行设置;
24、按照所设置的冲洗顺序控制冲洗装置按照所分析的最大水压强度要求,逐一冲洗餐盘内的厨余垃圾。
25、可选的,还包括位于根据餐盘上不同位置分布的厨余垃圾的粘附能力,按照粘附能力由高至低对冲洗顺序进行设置之后,且在按照所设置的冲洗顺序控制冲洗装置按照所分析的最大水压强度要求,逐一冲洗餐盘内的厨余垃圾之前的步骤,具体如下:
26、根据厨余垃圾与冲洗所需水温要求的对应关系、所获取的餐盘上所分布的厨余垃圾,分析所需的最高水温要求,作为冲洗装置后续实际冲洗过程中的水温。
27、可选的,根据预设的不同传送带的残余厨余垃圾的清理处理方案,对位于不同传送带上的餐盘以及其余餐具作初步厨余垃圾清理处理包括:
28、若为餐碗的专用传送带,则在传送餐碗期间使处于碗面向上的餐碗调整为碗面向下,且在传送餐碗期间使餐碗振动状态,从而使厨余垃圾通过镂空设置的专用传送带将厨余垃圾脱离餐碗。
29、可选的,在传送餐碗期间使处于碗面向上的餐碗调整为碗面向下包括如下:
30、通过直径检测传感器检测获取餐碗的碗面向上时靠近顶面位置的外侧壁的直径,定义餐碗在碗面向上时直径由下至上呈递增趋势;
31、控制夹持装置按照所识别的直径作宽度调整;
32、通过夹持装置夹持住处于碗面向上的餐碗作碗面向下翻转设置。。
33、可选的,通过夹持装置夹持住处于碗面向上的餐碗作碗面向下翻转设置包括:
34、通过夹持装置夹持住处于碗面向上的餐碗沿夹持装置所在的传送带向上传送,直至处于碗面向上的餐碗处于碗面向下,传送回与其余碗面向上的餐碗同一传送带。
35、第二方面,本申请提供一种自动洗碗机的控制系统,采用如下的技术方案:
36、一种自动洗碗机的控制系统,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的程序,该程序能够被处理器加载执行时实现如第一方面所述的自动洗碗机的控制方法。
技术特征:
1.一种自动洗碗机的控制方法,其特征在于,包括:
2.根据权利要求1所述的自动洗碗机的控制方法,其特征在于,将餐盘与其余餐具分离包括:
3.根据权利要求2所述的自动洗碗机的控制方法,其特征在于,根据预设的不同传送带的残余厨余垃圾的清理处理方案,对位于不同传送带上的餐盘以及其余餐具作初步厨余垃圾清理处理包括:
4.根据权利要求3所述的自动洗碗机的控制方法,其特征在于,同步控制位于传送带旁侧的冲洗装置对餐盘内的厨余垃圾作冲洗包括:
5.根据权利要求4所述的自动洗碗机的控制方法,其特征在于,分析所需的最大水压强度要求,并控制冲洗装置冲洗餐盘内的厨余垃圾包括:
6.根据权利要求5所述的自动洗碗机的控制方法,其特征在于,还包括位于根据餐盘上不同位置分布的厨余垃圾的粘附能力,按照粘附能力由高至低对冲洗顺序进行设置之后,且在按照所设置的冲洗顺序控制冲洗装置按照所分析的最大水压强度要求,逐一冲洗餐盘内的厨余垃圾之前的步骤,具体如下:
7.根据权利要求1所述的自动洗碗机的控制方法,其特征在于,根据预设的不同传送带的残余厨余垃圾的清理处理方案,对位于不同传送带上的餐盘以及其余餐具作初步厨余垃圾清理处理包括:
8.根据权利要求7所述的自动洗碗机的控制方法,其特征在于,在传送餐碗期间使处于碗面向上的餐碗调整为碗面向下包括如下:
9.根据权利要求8所述的自动洗碗机的控制方法,其特征在于,通过夹持装置夹持住处于碗面向上的餐碗作碗面向下翻转设置包括:
10.一种自动洗碗机的控制系统,其特征在于,包括:包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的程序,该程序能够被处理器加载执行时实现如权利要求1至9中任一项所述的一种自动洗碗机的控制方法。
技术总结
本申请涉及一种自动洗碗机的控制方法以及系统,通过输送带输送餐盘,并通过识别检测传感器识别餐盘以及餐具,并将餐盘与其余餐具分离,根据餐具类别与专用传送带的对应关系,将不同餐具输送至对应传送带;根据预设的不同传送带的残余厨余垃圾的清理处理方案,对位于不同传送带上的餐盘以及其余餐具作初步厨余垃圾清理处理;将完成初步厨余垃圾清理处理的餐盘以及其余餐具通过所对应的传送带,传送至统一传送带并依次输送至自动清洗消毒收集装置作内部清洗以及烘干。本申请具有如下效果:实现餐具的自动分离、自动翻转、自动分类、清洗、自动收集,降低人工、减少人为干预,使餐具的初步清理效率提高,间接提高了整体的餐具清洗效率以及效果。
技术研发人员:高智勇,丘东明
受保护的技术使用者:良基(厦门)自动化设备有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!