一种自动清洁设备的制作方法
本发明涉及清洁机器人,具体而言,涉及一种自动清洁设备。
背景技术:
1、清洁机器人目前主要包括扫地机器人和拖地机器人两种,扫地机器人和拖地机器人的功能比较单一,要么只能进行扫地要么只能进行拖地。若想同时进行扫地和拖地则必须同时准备两套设备,占用双倍的空间。
2、现有技术中,也有将扫地机器人和拖地机器人结合,在机器人尾端增设拖布从而实现扫地拖地一体清扫,但该一体清扫中的拖地功能仅采用一块拖布在地面平移,随着拖布的平移,在清洁机器人移动轨迹中进行单次的拖地,无法进行反复震动拖地的功能。同时,扫地机器人上的清洁组件无法进行升降调节,而是始终贴紧被清洁面,造成设备在不进行清洁工作时,在被清洁面上自由移动困难或者移动阻力大。因此,现有扫地机器人无法实现拖地、出水、升降、震动等多方位的有效控制。
技术实现思路
1、本发明的目的在于提供一种自动清洁设备,能够解决同时控制湿式清洁模组升降和拖地的技术问题。具体方案如下:
2、根据本发明的具体实施方式,本发明提供一种自动清洁设备,包括:
3、移动平台100,被配置为在操作面上自动移动;
4、清洁模组150,设置于所述移动平台100上,包括:
5、湿式清洁模组400,被配置为采用湿式清洁方式清洁所述操作面的至少一部分;
6、升降结构500,与所述湿式清洁模组400连接,被配置为能够使所述湿式清洁模组400相对于所述移动平台100上下移动;
7、驱动组件900,与所述升降结构500连接,被配置为能够为所述升降结构500的上升提供动力,以及为所述湿式清洁模组400清洁所述操作面提供动力。
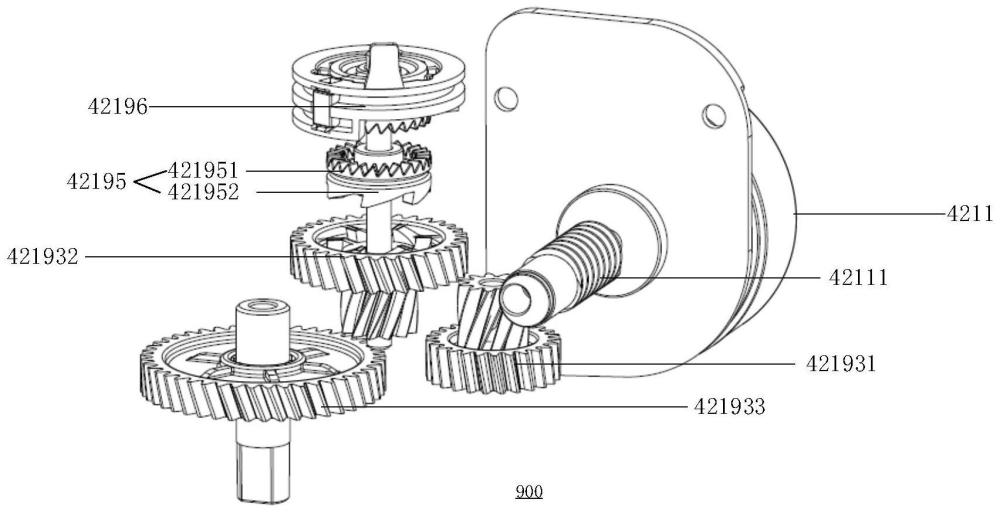
8、可选的,所述驱动组件900包括:
9、电机4211,用于提供正转和反转的驱动力;
10、齿轮组42193,与所述电机4211输出轴连接,用于输出所述电机4211正转和反转的驱动力。
11、可选的,当所述电机4211正转时,所述电机4211提供向所述湿式清洁模组400清洁所述操作面的动力;当所述电机4211反转时,所述电机4211提供驱动所述升降结构500升降的动力。
12、可选的,所述驱动组件900还包括:
13、离合器42195,与所述齿轮组42193啮合连接,当所述离合器42195与所述齿轮组42193反向咬合时提供驱动力,当所述离合器42195与所述齿轮组42193正向非咬合时不提供驱动力。
14、可选的,所述离合器42195包括:相对设置的第一离合器齿轮421951和第二离合器齿轮421952,其中,所述第二离合器齿轮421952具有沿逆时针方向倾斜角度排列的齿,使得当所述第二离合器齿轮421952与所述齿轮组42193反向咬合时提供驱动力,当所述第二离合器齿轮421952与所述齿轮组42193正向非咬合时不提供驱动力。
15、可选的,所述驱动组件900还包括:
16、拉索齿轮42196,与所述第一离合器齿轮421951啮合,在所述第一离合器齿轮421951的驱动下转动。
17、可选的,所述升降组件500还包括:
18、拉索42194,一端缠绕于所述拉索齿轮42196,另一端连接于所述升降结构500,在所述齿轮组42193的驱动下拉动所述升降结构500上升和下降。
19、可选的,所述驱动组件900还包括:
20、清水泵4219,与所述齿轮组42193啮合,在所述齿轮组42193的驱动下向所述湿式清洁模组400提供清洁液。
21、可选的,所述齿轮组42193包括:
22、一级传动齿轮421931,与所述电机4211输出轴连接,用于输出电机的驱动力;
23、二级传动齿轮421932,与所述一级传动齿轮421931啮合,用于将所述电机的驱动力输出至所述拉索齿轮42196;
24、三级传动齿轮421933,与所述二级传动齿轮421932啮合,用于将所述电机的驱动力输出至所述清水泵4219。
25、可选的,所述电机4211输出轴包括输出齿轮42111,与所述一级传动齿轮421931啮合,用于输出电机的驱动力。
26、可选的,所述驱动组件900还包括:
27、驱动轮4212,与所述电机输出轴连接,所述驱动轮4212为非对称结构;
28、震动件4213,与所述驱动轮4212连接,在所述驱动轮4212非对称的转动下实现往复运动。
29、与现有技术相比,本发明实施例具有如下的技术效果:
30、本发明提供的扫拖一体清洁设备,其中,驱动组件与所述升降结构连接,使得清洁设备可以协调的控制升降机构的升降以及清湿式清洁模组的清洁运动。
技术特征:
1.一种自动清洁设备,其特征在于,包括:
2.根据权利要求1所述的自动清洁设备,其特征在于,所述驱动组件(900)包括:
3.根据权利要求1所述的自动清洁设备,其特征在于:当所述电机(4211)正转时,所述电机(4211)提供向所述湿式清洁模组(400)清洁所述操作面的动力;当所述电机(4211)反转时,所述电机(4211)提供驱动所述升降结构(500)升降的动力。
4.根据权利要求3所述的自动清洁设备,其特征在于,所述驱动组件(900)还包括:
5.根据权利要求4所述的自动清洁设备,其特征在于,所述离合器(42195)包括:相对设置的第一离合器齿轮(421951)和第二离合器齿轮(421952),其中,所述第二离合器齿轮(421952)具有沿逆时针方向倾斜角度排列的齿,使得当所述第二离合器齿轮(421952)与所述齿轮组(42193)反向咬合时提供驱动力,当所述第二离合器齿轮(421952)与所述齿轮组(42193)正向非咬合时不提供驱动力。
6.根据权利要求5所述的自动清洁设备,其特征在于,所述驱动组件(900)还包括:
7.根据权利要求6所述的自动清洁设备,其特征在于,所述升降组件(500)还包括:
8.根据权利要求6所述的自动清洁设备,其特征在于,所述驱动组件(900)还包括:
9.根据权利要求8所述的自动清洁设备,其特征在于,所述齿轮组(42193)包括:
10.根据权利要求9所述的自动清洁设备,其特征在于,所述电机(4211)输出轴包括输出齿轮(42111),与所述一级传动齿轮(421931)啮合,用于输出电机的驱动力。
11.根据权利要求10所述的自动清洁设备,其特征在于,所述驱动组件(900)还包括:
技术总结
本发明提供一种自动清洁设备,包括:移动平台(100),被配置为在操作面上自动移动;清洁模组(150),设置于所述移动平台(100)上,包括:湿式清洁模组(400),被配置为采用湿式清洁方式清洁所述操作面的至少一部分;升降结构(500),与所述湿式清洁模组(400)连接,被配置为能够使所述湿式清洁模组(400)相对于所述移动平台(100)上下移动;驱动组件(900),与所述升降结构(500)连接,被配置为能够为所述升降结构(500)的上升提供动力,以及为所述湿式清洁模组(400)清洁所述操作面提供动力。本发明使得清洁设备可以协调的控制升降机构的升降以及湿式清洁模组的清洁运动。
技术研发人员:李行,成盼,段传林,谷二东
受保护的技术使用者:北京石头世纪科技股份有限公司
技术研发日:
技术公布日:2024/1/25
- 还没有人留言评论。精彩留言会获得点赞!