一种防撞清扫机器人
本发明主要涉及清扫机器人的,具体为一种防撞清扫机器人。
背景技术:
1、清扫机器人是一种为人类服务的特种机器人,主要用于家庭卫生清洁、清洗等功能,具有噪音小、能耗抵和使用便捷等特点。
2、现有的清扫机器人普遍较小,视野低,因此在进行清扫工作时,容易被人踩踏和碰撞,以及在一些养宠物的家庭,容易因宠物的好奇与宠物发生碰撞。
3、现有的清扫机器人在受到碰撞后,撞击力会直接作用到清扫机器人内部,长期使用,会造成清扫机器人内部零件损坏影响机器人使用寿命,因此需要一种防撞清扫机器人。
技术实现思路
1、本发明技术方案针对现有技术解决方案过于单一的技术问题,提供了显著不同于现有技术的解决方案,主要提供了一种防撞清扫机器人,用以解决上述背景技术中提出的清扫机器人在受到碰撞后内部零件损坏的技术问题。
2、本发明解决上述技术问题采用的技术方案为:
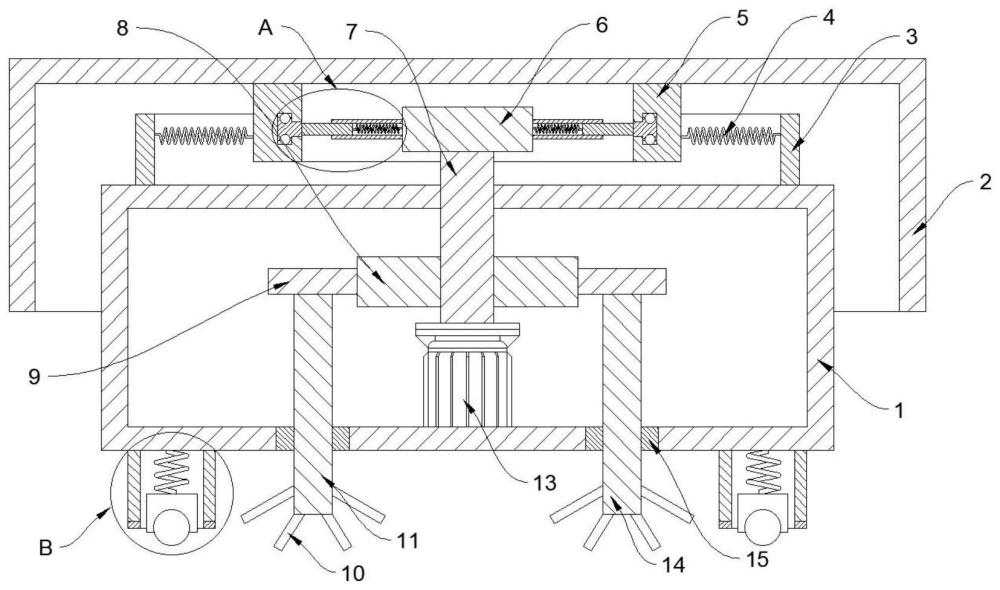
3、一种防撞清扫机器人,包括清扫机器人本体,所述清扫机器人本体内中心位置连接固定有驱动件,所述驱动件穿过清扫机器人本体,所述清扫机器人本体上方设有保护壳,所述保护壳内中心位置连接固定有第一圆筒,所述驱动件远离清扫机器人本体的一端设置在第一圆筒内,所述驱动件形表面铰接有多个回弹件,所述回弹件远离驱动件的一端与第一圆筒滑动接触。
4、优选的,所述驱动件包括伺服电机,所述伺服电机连接固定在清扫机器人本体内,所述伺服电机输出端连接固定有转动杆,所述转动杆远离伺服电机的一端连接固定有转动板,所述转动板位于第一圆筒内,所述回弹件铰接在第一圆筒环形表面。
5、优选的,所述回弹件包括管套,所述管套铰接在转动板环形表面,所述管套远离转动板的一端插接有活动杆,所述活动杆远离管套的一端与第一圆筒滑动接触,所述活动杆在管套内的一端连接固定有第一弹性件,所述第一弹性件远离活动杆的一端与管套连接固定。
6、优选的,所述第一圆筒环形内表面开设有滑槽,所述滑槽内滑动连接有滑块,所述滑块远离滑槽的一端与活动杆相铰接,所述滑块上表面和滑块下表面均开设有圆孔,所述圆孔内滚动连接有滚珠。
7、优选的,所述转动杆环形表面连接固定有第一齿轮,所述清扫机器人本体下表面开设有多个围绕伺服电机环形等距布置的圆孔,所述圆孔内连接固定有轴承,所述轴承内连接固定有连接杆,所述连接杆在清扫机器人本体内的一端连接固定有第二齿轮,所述第一齿轮与第二齿轮向啮合,所述连接杆远离第二齿轮的一端连接固定有清扫刷。
8、优选的,所述清扫机器人本体上表面连接固定有第二圆筒,所述第二圆筒内连接固定有多个第二弹性件,所述第二弹性件远离第二圆筒的一端与第一圆筒连接固定。
9、优选的,所述清扫机器人本体下表面连接固定有多个矩形筒,所述矩形筒内插接有多个滚轮,所述滚轮在矩形筒内的一端连接固定有第三弹性件,所述第三弹性件远离滚轮的一端连接固定在矩形筒内。
10、优选的,所述矩形筒远离清扫机器人本体的一端连接固定有防滑垫。
11、与现有技术相比,本发明的有益效果为:
12、1.通过在第一圆筒内滑动连接多个由管套、活动杆和第一弹性件组成的回弹结构,当清扫机器人一侧受到撞击后,旋转的多个回弹结构分别承受一部分力,并将这部分力分担到第一圆筒的其他位置,通过将撞击力分散的方式,从而降低对清扫机器人内部零件的冲击,减小清扫机器人内部零件损坏的可能性,从而延长机器人的使用寿命。
13、2.通过将管套、活动杆和第一弹性件组成的回弹结构两端分解与转动板和滑块进行铰接,从而使保护壳在受到斜向上的撞击力或斜向下的撞击力后,回弹结构依旧可在第一圆筒内转动,从而避免回弹结构直接拉扯造成的错位与损坏。
14、3.通过在转动杆环形表面连接固定第一齿轮,再在第一齿轮环形表面啮合多个第二齿轮,再将清扫刷通过连接杆与第二齿轮连接固定,利用一个伺服电机同时带动清扫刷和转动板转动,从而减少驱动设备的使用。
15、以下将结合附图与具体的实施例对本发明进行详细的解释说明。
技术特征:
1.一种防撞清扫机器人,包括清扫机器人本体(1),其特征在于:所述清扫机器人本体(1)内中心位置连接固定有驱动件,所述驱动件穿过清扫机器人本体(1),所述清扫机器人本体(1)上方设有保护壳(2),所述保护壳(2)内中心位置连接固定有第一圆筒(5),所述驱动件远离清扫机器人本体(1)的一端设置在第一圆筒(5)内,所述驱动件形表面铰接有多个回弹件,所述回弹件远离驱动件的一端与第一圆筒(5)滑动接触。
2.根据权利要求1所述的一种防撞清扫机器人,其特征在于:所述驱动件包括伺服电机(13),所述伺服电机(13)连接固定在清扫机器人本体(1)内,所述伺服电机(13)输出端连接固定有转动杆(7),所述转动杆(7)远离伺服电机(13)的一端连接固定有转动板(6),所述转动板(6)位于第一圆筒(5)内,所述回弹件铰接在第一圆筒(5)环形表面。
3.根据权利要求2所述的一种防撞清扫机器人,其特征在于:所述回弹件包括管套(14),所述管套(14)铰接在转动板(6)环形表面,所述管套(14)远离转动板(6)的一端插接有活动杆(15),所述活动杆(15)远离管套(14)的一端与第一圆筒(5)滑动接触,所述活动杆(15)在管套(14)内的一端连接固定有第一弹性件(16),所述第一弹性件(16)远离活动杆(15)的一端与管套(14)连接固定。
4.根据权利要求3所述的一种防撞清扫机器人,其特征在于:所述第一圆筒(5)环形内表面开设有滑槽(17),所述滑槽(17)内滑动连接有滑块(18),所述滑块(18)远离滑槽(17)的一端与活动杆(15)相铰接,所述滑块(18)上表面和滑块(18)下表面均开设有圆孔,所述圆孔内滚动连接有滚珠(19)。
5.根据权利要求2所述的一种防撞清扫机器人,其特征在于:所述转动杆(7)环形表面连接固定有第一齿轮(8),所述清扫机器人本体(1)下表面开设有多个围绕伺服电机(13)环形等距布置的圆孔,所述圆孔内连接固定有轴承(12),所述轴承(12)内连接固定有连接杆(11),所述连接杆(11)在清扫机器人本体(1)内的一端连接固定有第二齿轮(9),所述第一齿轮(8)与第二齿轮(9)向啮合,所述连接杆(11)远离第二齿轮(9)的一端连接固定有清扫刷(10)。
6.根据权利要求1所述的一种防撞清扫机器人,其特征在于:所述清扫机器人本体(1)上表面连接固定有第二圆筒(3),所述第二圆筒(3)内连接固定有多个第二弹性件(4),所述第二弹性件(4)远离第二圆筒(3)的一端与第一圆筒(5)连接固定。
7.根据权利要求1所述的一种防撞清扫机器人,其特征在于:所述清扫机器人本体(1)下表面连接固定有多个矩形筒(23),所述矩形筒(23)内插接有多个滚轮(21),所述滚轮(21)在矩形筒(23)内的一端连接固定有第三弹性件(22),所述第三弹性件(22)远离滚轮(21)的一端连接固定在矩形筒(23)内。
8.根据权利要求7所述的一种防撞清扫机器人,其特征在于:所述矩形筒(23)远离清扫机器人本体(1)的一端连接固定有防滑垫(20)。
技术总结
本发明公开了一种防撞清扫机器人,包括清扫机器人本体,所述清扫机器人本体内中心位置连接固定有驱动件,所述驱动件穿过清扫机器人本体,所述清扫机器人本体上方设有保护壳,所述保护壳内中心位置连接固定有第一圆筒,所述驱动件远离清扫机器人本体的一端设置在第一圆筒内,所述驱动件形表面铰接有多个回弹件,所述回弹件远离驱动件的一端与第一圆筒滑动接触,本发明通过将撞击力分散的方式,降低清扫机器人受到撞击后对内部零件的冲击,从而降低清扫机器人内部零件损坏的可能性。
技术研发人员:汤琦玥,陈晨,方晓阳
受保护的技术使用者:南京林业大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!