机器人控制方法、处理器、控制装置、机器人及存储介质与流程
本公开涉及人工智能领域、智能机器人领域,具体地涉及一种机器人控制方法、处理器、控制装置、机器人及存储介质。
背景技术:
1、随着科技的快速发展,智能扫地机器人、智能搬运机器人等能够自动完成作业任务的智能移动机器人被广泛地应用于家居清洁、物流作业等应用场景中。智能移动机器人可以根据采集到的环境信息来执行运动、搬运等机器人动作,而在比较复杂的作业环境中智能移动机器人会出现行动效率低、动作迟缓等低效运动情况。
技术实现思路
1、鉴于上述问题,本公开提供了机器人控制方法、处理器、控制装置、机器人及存储介质。
2、根据本公开的第一个方面,提供了一种机器人控制方法,应用于安装在上述机器人上的第一处理器,包括:
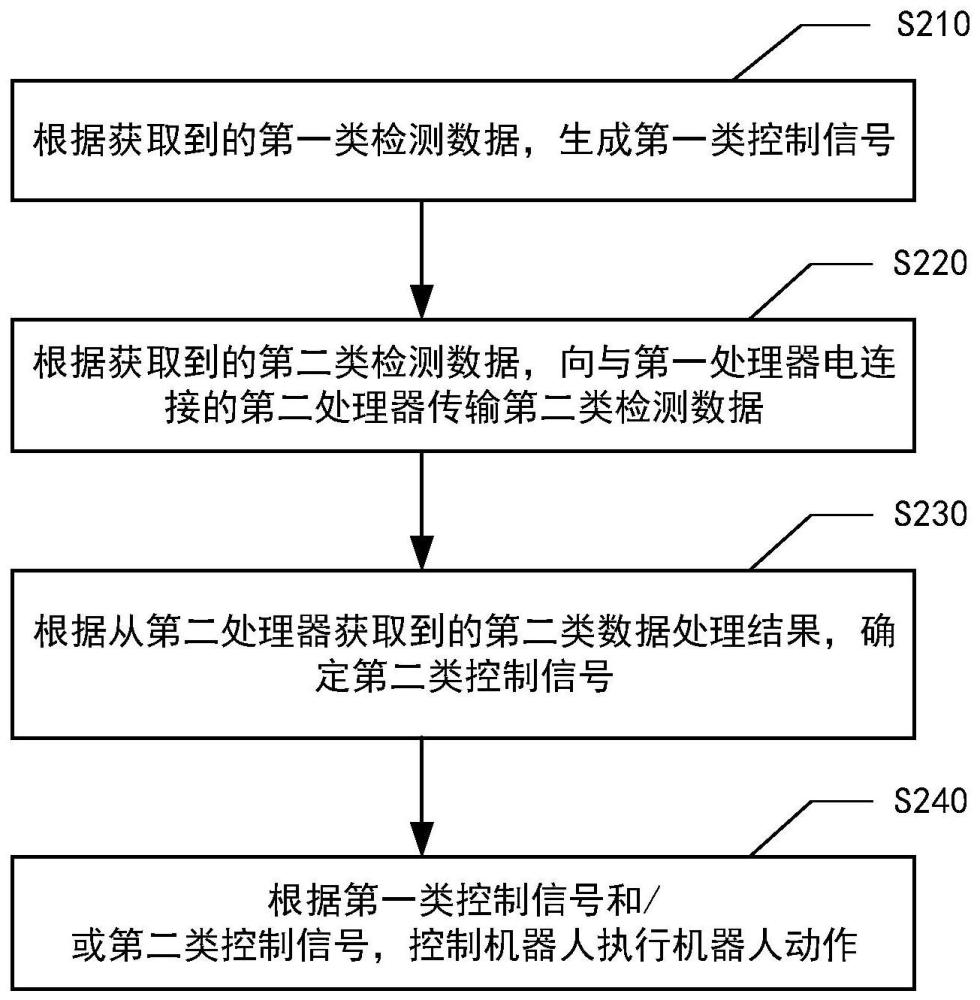
3、根据获取到的第一类检测数据,生成第一类控制信号;
4、根据获取到的第二类检测数据,向与上述第一处理器电连接的第二处理器传输上述第二类检测数据,其中,上述第二处理器被配置为根据上述第二类检测数据生成第二类数据处理结果,上述第二类检测数据的数据量大于上述第一类检测数据的数据量;
5、根据从上述第二处理器获取到的上述第二类数据处理结果,确定第二类控制信号;以及
6、根据上述第一类控制信号和/或上述第二类控制信号,控制上述机器人执行机器人动作。
7、根据本公开的实施例,上述第一处理器被配置为根据上述第一类检测数据,生成第一类数据处理结果;
8、其中,根据从上述第二处理器获取到的上述第二类数据处理结果,确定第二类控制信号包括:
9、根据上述第一类数据处理结果和上述第二类数据处理结果,确定上述第二类控制信号。
10、根据本公开的实施例,上述机器人控制方法还包括:
11、响应于来自上述第二处理器的数据请求指令,根据上述数据请求指令,从上述第一类检测数据中确定目标第一类检测数据;以及
12、向上述第二处理器传输上述目标第一类检测数据。
13、根据本公开的实施例,上述第一处理器通过数据接口与检测装置通信连接,上述数据接口具有接口属性;
14、上述机器人控制方法还包括:
15、响应于获取到来自上述检测装置的初始检测数据,根据与上述初始检测数据相对应的数据接口的接口属性,确定上述初始检测数据的数据类型;
16、在上述数据类型为第一类型的情况下,将上述初始检测数据确定为上述第一类检测数据;以及
17、在上述数据类型为第二类型的情况下,将上述初始检测数据确定为上述第二类检测数据。
18、根据本公开的实施例,上述第二类检测数据包括以下至少一项:
19、与上述机器人的作业环境相关的作业环境图像、激光雷达探测数据、毫米波雷达探测数据、音频检测数据。
20、根据本公开的实施例,上述第一类检测数据包括以下至少一项:
21、红外线检测数据、温度检测数据、超声波雷达探测数据、电池状态数据、地理位置检测数据、机器人姿态检测数据。
22、本公开的另一个方面还提供了一种机器人控制方法,应用于安装在上述机器人上的第二处理器,包括:
23、根据从第一处理器获取到的第二类检测数据,生成第二类数据处理结果;以及
24、向上述从第一处理器传输上述第二类数据处理结果;
25、其中,上述第一处理器被配置为根据权利要求1至6中任一项上述的方法控制上述机器人执行机器人动作。
26、根据本公开的实施例,根据从第一处理器获取到的第二类检测数据,生成第二类数据处理结果包括:
27、根据从第一处理器获取到的第二类检测数据,生成第二类数据处理任务;
28、确定与上述第二类数据处理任务相关联的数据请求指令,上述数据请求指令适用于指示获取目标第一类检测数据;
29、向上述第一处理器传输上述数据请求指令,其中,上述第一处理器被配置为根据上述数据请求指令,从上述第一类检测数据中确定目标第一类检测数据;以及
30、根据上述第二类检测数据和上述目标第一类检测数据执行上述第二类数据处理任务,得到上述第二类数据处理结果。
31、本公开的另一个方面还提供了一种用于控制机器人的第一处理器,包括:
32、第一类控制信号生成模块,用于根据获取到的第一类检测数据,生成第一类控制信号;
33、第二类检测数据传输模块,用于根据获取到的第二类检测数据,向与上述第一处理器电连接的第二处理器传输上述第二类检测数据,其中,上述第二处理器被配置为根据上述第二类检测数据生成第二类数据处理结果,上述第二类检测数据的数据量大于上述第一类检测数据的数据量;
34、第二类控制信号确定模块,用于根据从上述第二处理器获取到的上述第二类数据处理结果,确定第二类控制信号;以及
35、控制模块,用于根据上述第一类控制信号和/或上述第二类控制信号,控制上述机器人执行机器人动作。
36、本公开的另一个方面还提供了一种用于控制机器人的第二处理器,包括:
37、第二类数据处理结果生成模块,用于根据从第一处理器获取到的第二类检测数据,生成第二类数据处理结果;以及
38、第二类数据处理结果传输模块,用于向上述从第一处理器传输上述第二类数据处理结果;
39、其中,上述第一处理器被配置为根据权利要求1至6中任一项上述的方法控制上述机器人执行机器人动作。
40、本公开的另一个方面还提供了一种用于控制机器人的控制装置,包括:
41、第一处理器,被配置为执行应用于安装在机器人上的第一处理器的机器人控制方法;
42、第二处理器,被配置为执行执行应用于安装在机器人上的第二处理器的机器人控制方法,上述第一处理器与上述第二处理器电连接。
43、本公开的另一个方面还提供了一种机器人,包括:
44、机器人壳体;
45、如上所述的控制装置,设置在上述机器人壳体中。
46、根据本公开的实施例,上述控制装置还包括散热板和处理器基板;
47、上述第二处理器安装于上述处理器基板上,上述散热板被配置为与上述处理器基板连接,且上述散热板与上述机器人壳体的内壁连接。
48、本公开的的另一个方面还提供了一种电子设备,包括:一个或多个处理器;存储器,用于存储一个或多个程序,其中,当上述一个或多个程序被上述一个或多个处理器执行时,使得一个或多个处理器执行上述机器人控制方法。
49、本公开的另一个方面还提供了一种计算机可读存储介质,其上存储有可执行指令,该指令被处理器执行时使处理器执行上述机器人控制方法。
50、本公开的另一个方面还提供了一种计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现上述机器人控制方法。
技术特征:
1.一种机器人控制方法,应用于安装在所述机器人上的第一处理器,包括:
2.根据权利要求1所述的方法,其中,所述第一处理器被配置为根据所述第一类检测数据,生成第一类数据处理结果;
3.根据权利要求1所述的方法,还包括:
4.根据权利要求1所述的方法,其中,所述第一处理器通过数据接口与检测装置通信连接,所述数据接口具有接口属性;
5.根据权利要求1至4中任一项所述的方法,其中,所述第二类检测数据包括以下至少一项:
6.根据权利要求1至4中任一项所述的方法,其中,所述第一类检测数据包括以下至少一项:
7.一种机器人控制方法,应用于安装在所述机器人上的第二处理器,包括:
8.根据权利要求7所述的方法,其中,根据从第一处理器获取到的第二类检测数据,生成第二类数据处理结果包括:
9.一种用于控制机器人的第一处理器,包括:
10.一种用于控制机器人的第二处理器,包括:
11.一种用于控制机器人的控制装置,包括:
12.一种机器人,包括:
13.根据权利要求12所述的机器人,其中,所述控制装置还包括散热板和处理器基板;
14.一种电子设备,包括:
15.一种计算机可读存储介质,其上存储有可执行指令,该指令被处理器执行时使处理器执行根据权利要求1~8中任一项所述的方法。
16.一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现根据权利要求1~8中任一项所述的方法。
技术总结
本公开提供了一种机器人控制方法、处理器、控制装置、机器人及存储介质,可以应用于人工智能领域、智能机器人领域。该方法应用于安装在机器人上的第一处理器,包括:根据获取到的第一类检测数据,生成第一类控制信号;根据获取到的第二类检测数据,向与第一处理器电连接的第二处理器传输第二类检测数据,其中,第二处理器被配置为根据第二类检测数据生成第二类数据处理结果,第二类检测数据的数据量大于第一类检测数据的数据量;根据从第二处理器获取到的第二类数据处理结果,确定第二类控制信号;以及根据第一类控制信号和/或第二类控制信号,控制机器人执行机器人动作。
技术研发人员:陈志强,崔锦,李红涛,白飞龙,张爱刚,刘声泉
受保护的技术使用者:同方威视技术股份有限公司
技术研发日:
技术公布日:2024/3/4
- 还没有人留言评论。精彩留言会获得点赞!