清洁机器人的识别电路和清洁机器人的制作方法
本发明涉及清洁机器人,具体而言,涉及一种清洁机器人的识别电路和清洁机器人。
背景技术:
1、随着清洁机器人技术的发展,基站需要为清洁机器人提供更多功能,在基于安全因素、寿命因素等综合考量下,会为一个清洁机器人设置多个基站,清洁机器人识别多个基站类型成为亟需解决的问题。
技术实现思路
1、本发明的提供了一种清洁机器人的识别电路和清洁机器人。
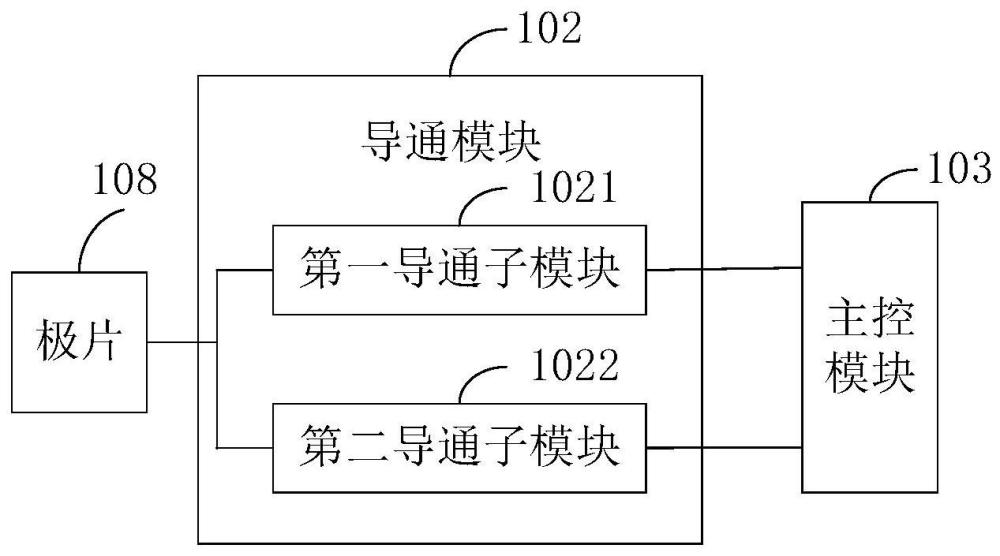
2、第一方面,本发明提供了一种清洁机器人的识别电路,包括:极片、导通模块和主控模块,所述导通模块包括:第一导通子模块、第二导通子模块;
3、所述极片,分别与所述第一导通子模块和所述第二导通子模块电连接,并用于与基站对接,将所述基站的电信号分别输入所述第一导通子模块和第二导通子模块;
4、所述第一导通子模块,与所述主控模块的第一输入端电连接,用于向所述主控模块输入第一电信号;
5、所述第二导通子模块,与所述主控模块的第二输入端电连接,用于向所述主控模块输入第二电信号;
6、所述主控模块,用于根据所述第一电信号和所述第二电信号识别所述基站的类型。
7、在一实施方式中,所述主控模块,还用于若所述第一电信号和所述第二电信号均从第一预设电平变为第二预设电平,则确定所述基站的类型为第一预设类型设备;若所述第一电信号不变,所述第二电信号从第一预设电平变为第二预设电平,则确定所述基站的类型为第二预设类型设备。
8、在一实施方式中,所述第一预设类型设备的极片的电信号对应的电压高于所述第二预设类型设备的极片的电信号对应的电压。
9、在一实施方式中,清洁机器人的识别电路还包括:充放电模块,与供电电源电连接;
10、所述主控模块,用于若所述基站的类型为第一预设类型设备,则控制所述充放电模块接收所述基站的电能。
11、在一实施方式中,清洁机器人的识别电路还包括:切换模块和通信模块;
12、所述通信模块与所述主控模块电连接;
13、所述切换模块具有控制端、固定输入端和第一输出端,所述控制端与所述主控模块电连接,所述固定输入端与所述极片电连接,所述第一输出端与所述通信模块或所述充放电模块电连接;
14、所述第一输出端与所述通信模块电连接时,所述主控模块控制所述通信模块和所述极片之间建立通信连接;
15、所述第一输出端与所述充放电模块电连接时,所述清洁机器人通过所述充放电模块对所述基站充电或接收所述基站的电能。
16、在一实施方式中,所述主控模块,还用于当所述基站的类型为第二预设类型设备时,控制所述第一输出端与所述通信模块电连接;
17、所述通信模块,还用于通过所述极片向所述基站发送基站类型查询指令,接收所述基站基于所述基站类型查询指令反馈的基站类型信息;
18、所述主控模块,还用于根据所述基站类型信息进一步确定基站设备。
19、在一实施方式中,所述主控模块,用于若根据所述基站类型信息进一步确定所述基站设备为待充电设备,则控制所述清洁机器人通过所述充放电模块对所述基站充电;若根据所述基站类型信息进一步确定所述基站设备为普通设备,则使所述基站执行相应操作。
20、在一实施方式中,所述切换模块包括继电器,所述继电器包括所述控制端、所述固定输入端和所述第一输出端和第二输出端;
21、当所述第一输出端与所述通信模块电连接时,所述第二输出端与空闲端口电连接;
22、当所述第一输出端与所述充放电模块电连接时,所述第二输出端与所述充放电模块电连接。
23、在一实施方式中,所述通信模块包括第一场效应管,所述第一场效应管的栅极与所述供电电源电连接,所述第一场效应管的漏极与所述切换模块电连接,所述第一场效应管的源极与所述主控模块电连接。
24、在一实施方式中,所述第一导通子模块包括分压器件和第一导通器件;
25、所述第一导通器件的控制端通过所述分压器件和所述极片电连接,所述第一导通器件的输入端与所述供电电源电连接,所述第一导通器件的输出端接地;
26、所述第二导通子模块包括第二导通器件,所述第二导通器件的控制端和所述极片电连接,所述第二导通器件的输入端与所述供电电源电连接,所述第二导通器件的输出端接地。
27、在一实施方式中,所述第一导通器件为第一三极管,所述第一三极管的基极为所述第一导通器件的控制端,所述第一三极管的集电极为所述第一导通器件的输入端,所述第一三极管的发射极为所述第一导通器件的输出端;或者,
28、所述第一导通器件为第二场效应管,所述第二场效应管的栅极为所述第一导通器件的控制端,所述第二场效应管的漏极为所述第一导通器件的输入端,所述第二场效应管的源极为所述第一导通器件的输出端。
29、在一实施方式中,所述第二导通器件为第二三极管;所述第二三极管的基极为所述第二导通器件的控制端;所述第二三极管的集电极为所述第二导通器件的输入端;所述第二三极管的发射极为所述第二导通器件的输出端;或者,
30、所述第二导通器件为第三场效应管;所述第三场效应管的栅极为所述第二导通器件的控制端;所述第三场效应管的漏极为所述第二导通器件的输入端;所述第三场效应管的源极为所述第二导通器件的输出端。
31、在一实施方式中,所述分压器件包括:第一电阻和第二电阻,所述第一电阻的一端与所述极片电连接,所述第二电阻的一端和所述第一导通器件的控制端均与所述第一电阻的另一端连接,所述第二电阻的另一端接地。
32、在一实施方式中,所述第二电阻的阻值小于所述第一电阻。
33、第二方面,本发明提高一种清洁机器人,包括第一方面所提供的清洁机器人的识别电路。
34、本发明实施例提供的清洁机器人的识别电路,通过将主控模块分别与第一导通子模块和第二导通子模块电连接,当基站的极片与识别电路的极片对接后,基站的极片的电信号分别输入所述第一导通子模块和第二导通子模块,使得第一导通子模块和第二导通子模块分别向主控模块发送对应的第一电信号、第二电信号,主控芯片基于第一电信号、第二电信号是否发生变化确定基站的类型,可以准确识别基站类型,确保识别电路的稳定性。
技术特征:
1.一种清洁机器人的识别电路,其特征在于,包括:极片、导通模块和主控模块,所述导通模块包括:第一导通子模块、第二导通子模块;
2.根据权利要求1所述的识别电路,其特征在于,所述主控模块,还用于若所述第一电信号和所述第二电信号均从第一预设电平变为第二预设电平,则确定所述基站的类型为第一预设类型设备;若所述第一电信号不变,所述第二电信号从第一预设电平变为第二预设电平,则确定所述基站的类型为第二预设类型设备。
3.根据权利要求2所述的识别电路,其特征在于,所述第一预设类型设备的极片的电信号对应的电压高于所述第二预设类型设备的极片的电信号对应的电压。
4.根据权利要求2所述的识别电路,其特征在于,还包括:充放电模块,与供电电源电连接;
5.根据权利要求4所述的识别电路,其特征在于,还包括:切换模块和通信模块;
6.根据权利要求5所述的识别电路,其特征在于,还包括:
7.根据权利要求6所述的识别电路,其特征在于,所述主控模块,用于若根据所述基站类型信息进一步确定所述基站设备为待充电设备,则控制所述清洁机器人通过所述充放电模块对所述基站充电;若根据所述基站类型信息进一步确定所述基站设备为普通设备,则使所述基站执行相应操作。
8.根据权利要求5所述的识别电路,其特征在于,所述切换模块包括继电器,所述继电器包括所述控制端、所述固定输入端和所述第一输出端和第二输出端;
9.根据权利要求5-8任一所述的识别电路,其特征在于,所述通信模块包括第一场效应管,所述第一场效应管的栅极与所述供电电源电连接,所述第一场效应管的漏极与所述切换模块电连接,所述第一场效应管的源极与所述主控模块电连接。
10.根据权利要求4-8任一所述的识别电路,其特征在于,所述第一导通子模块包括分压器件和第一导通器件,所述第一导通器件的控制端通过所述分压器件和所述极片电连接,所述第一导通器件的输入端与所述供电电源电连接,所述第一导通器件的输出端接地;
11.根据权利要求10所述的识别电路,其特征在于,所述第一导通器件为第一三极管,所述第一三极管的基极为所述第一导通器件的控制端,所述第一三极管的集电极为所述第一导通器件的输入端,所述第一三极管的发射极为所述第一导通器件的输出端;
12.根据权利要求10所述的识别电路,其特征在于,所述第二导通器件为第二三极管,所述第二三极管的基极为所述第二导通器件的控制端,所述第二三极管的集电极为所述第二导通器件的输入端,所述第二三极管的发射极为所述第二导通器件的输出端;
13.根据权利要求10所述的识别电路,其特征在于,所述分压器件包括:第一电阻和第二电阻,所述第一电阻的一端与所述极片电连接,所述第二电阻的一端和所述第一导通器件的控制端均与所述第一电阻的另一端连接,所述第二电阻的另一端接地。
14.根据权利要求13所述的识别电路,其特征在于,所述第二电阻的阻值小于所述第一电阻。
15.一种清洁机器人,其特征在于,包括权利要求1-14任一所述的清洁机器人的识别电路。
技术总结
本发明的实施例提供了一种清洁机器人的识别电路及清洁机器人,涉及清洁机器人领域,该电路包括极片、导通模块和主控模块,导通模块包括:第一导通子模块、第二导通子模块;极片,分别与第一导通子模块和第二导通子模块电连接,用于与基站对接,将基站的电信号分别输入第一导通子模块和第二导通子模块;第一导通子模块,与主控模块的第一输入端电连接,用于向主控模块输入第一电信号;第二导通子模块,与主控模块的第二输入端电连接,用于向主控模块输入第二电信号;主控模块,用于根据第一电信号和第二电信号识别基站的类型,可以准确识别基站类型,确保识别电路的稳定性。
技术研发人员:梁嘉晋,李建刚,潘阳,黎林,张子睿
受保护的技术使用者:卧安科技(深圳)有限公司
技术研发日:
技术公布日:2024/4/24
- 还没有人留言评论。精彩留言会获得点赞!