一种扫地机器人地面环境识别装置
本技术涉及扫地机器人,具体是一种扫地机器人地面环境识别装置。
背景技术:
1、扫地机器人,又称自动打扫机、智能吸尘、机器人吸尘器等,是智能家用电器的一种,能凭借一定的人工智能,自动在房间内完成地板清理工作。智能扫地机器人在自动运行时,需要地面环境识别装置实时监测地面状态,从而便于使扫地机器人计算最佳行走路线。
2、根据专利公开号为:cn215128083u公开了一种扫地机器人地面环境识别装置,包括扫地机器人本体、垃圾收纳盒、激光测距传感器、电控开关、景深摄像头、压力滚轮、超声波雷达、led灯带,扫地机器人本体内置垃圾收纳盒,扫地机器人本体上端有激光测距传感器、电控开关和led灯带,超声波雷达安装在前端位置,景深摄像头安装在两侧,压力滚轮均布安装在扫地机器人本体外围,一种扫地机器人地面环境识别装置,激光测距传感器和景深摄像头做环境数据检测,超声波雷达做清洁导航,压力滚轮做障碍压力感应,滚轮受到外侧压力向内运动时弧形限位架弧形面与滚轮契合,运动杆通过运动套筒触动压力传感器感应外侧压力,调整运动状态,拖地单元的由拖地毛毯做地面清洁,方便拆卸清洗,但是,该专利不能对机器人前方的下台阶和下坡道进行实时探测,机器人驶向下台阶时就会发生坠落,从而导致机器人损坏,影响正常使用。因此,本领域技术人员提供了一种扫地机器人地面环境识别装置,以解决上述背景技术中提出的问题。
技术实现思路
1、本实用新型的目的在于提供一种扫地机器人地面环境识别装置,以解决上述背景技术中提出的问题。
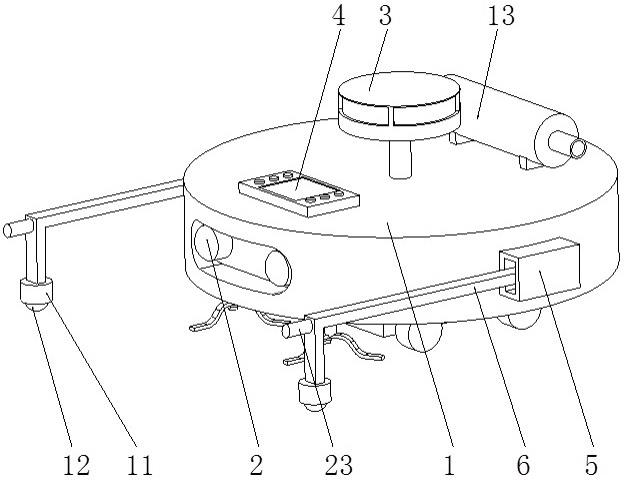
2、本实用新型的技术方案是:一种扫地机器人地面环境识别装置,包括扫地机器人本体,所述扫地机器人本体的前端安装有超声波雷达,且扫地机器人本体的上侧位于中心位置处安装有激光测距传感器,所述扫地机器人本体的上侧位于前端位置处安装有控制器,且扫地机器人本体的上侧位于后端位置处设置有空气净化装置,所述扫地机器人本体的两侧对称设置有两个结构相同的机械防坠落机构,所述机械防坠落机构包括固定于扫地机器人本体一侧的壳体,所述壳体的内部一端设置有l形连杆,所述l形连杆通过转轴转动连接于壳体的内侧,且l形连杆的上侧位于一端位置处连接有拉力弹簧,所述拉力弹簧的上端与壳体的内侧连接,所述l形连杆的下侧位于一端位置处固定有触发凸块,所述壳体的内部一侧对应触发凸块的位置处安装有行程开关,所述l形连杆的另一端固定有转动套壳,所述转动套壳的内侧转动连接有转动球,所述行程开关与控制器电性连接。
3、优选的,所述空气净化装置包括固定于扫地机器人本体上侧的通气套筒,所述通气套筒的一端插设有出气管,且通气套筒的另一端插设有进气管,所述通气套筒的内侧位于一端位置处固定有支架,所述支架的一侧安装有循环风机,所述通气套筒的内侧位于中段位置处设置有活性炭滤芯,且通气套筒的内侧位于另一端位置处设置有滤网。
4、优选的,所述出气管和进气管的内侧均套设有消音海绵。
5、优选的,所述进气管的一端固定有集气斗。
6、优选的,所述l形连杆的上下两侧对称固定有两个弹性限位柱。
7、优选的,所述l形连杆的另一端连接有缓冲柱,所述缓冲柱采用橡胶材质的构件。
8、优选的,所述转动球位于扫地机器人本体的前端10厘米位置处。
9、本实用新型通过改进在此提供一种扫地机器人地面环境识别装置,与现有技术相比,具有如下改进及优点:
10、其一:本实用新型,通过机械防坠落机构,可以对扫地机器人本体前方的路况进行探测,如果前方出现下台阶或下坡道,可以使扫地机器人本体停止前进或者重新计算新路线,防止扫地机器人本体从台阶坠落,提高了使用安全性,且该机构结构简单,运行可靠性高,不易出现故障;
11、其二:本实用新型,通过空气净化装置,可以对房间里的空气进行净化,吸附空气中的异味,提高了实用性。
技术特征:
1.一种扫地机器人地面环境识别装置,其特征在于:包括扫地机器人本体(1),所述扫地机器人本体(1)的前端安装有超声波雷达(2),且扫地机器人本体(1)的上侧位于中心位置处安装有激光测距传感器(3),所述扫地机器人本体(1)的上侧位于前端位置处安装有控制器(4),且扫地机器人本体(1)的上侧位于后端位置处设置有空气净化装置,所述扫地机器人本体(1)的两侧对称设置有两个结构相同的机械防坠落机构;
2.根据权利要求1所述的一种扫地机器人地面环境识别装置,其特征在于:所述空气净化装置包括固定于扫地机器人本体(1)上侧的通气套筒(13),所述通气套筒(13)的一端插设有出气管(14),且通气套筒(13)的另一端插设有进气管(15),所述通气套筒(13)的内侧位于一端位置处固定有支架(16),所述支架(16)的一侧安装有循环风机(17),所述通气套筒(13)的内侧位于中段位置处设置有活性炭滤芯(18),且通气套筒(13)的内侧位于另一端位置处设置有滤网(19)。
3.根据权利要求2所述的一种扫地机器人地面环境识别装置,其特征在于:所述出气管(14)和进气管(15)的内侧均套设有消音海绵(20)。
4.根据权利要求2所述的一种扫地机器人地面环境识别装置,其特征在于:所述进气管(15)的一端固定有集气斗(21)。
5.根据权利要求1所述的一种扫地机器人地面环境识别装置,其特征在于:所述l形连杆(6)的上下两侧对称固定有两个弹性限位柱(22)。
6.根据权利要求1所述的一种扫地机器人地面环境识别装置,其特征在于:所述l形连杆(6)的另一端连接有缓冲柱(23),所述缓冲柱(23)采用橡胶材质的构件。
7.根据权利要求1所述的一种扫地机器人地面环境识别装置,其特征在于:所述转动球(12)位于扫地机器人本体(1)的前端10厘米位置处。
技术总结
本技术涉及扫地机器人技术领域,具体是一种扫地机器人地面环境识别装置,包括扫地机器人本体,所述扫地机器人本体的前端安装有超声波雷达,且扫地机器人本体的上侧位于中心位置处安装有激光测距传感器,所述扫地机器人本体的上侧位于前端位置处安装有控制器,且扫地机器人本体的上侧位于后端位置处设置有空气净化装置。本技术,通过机械防坠落机构,可以对扫地机器人本体前方的路况进行探测,如果前方出现下台阶或下坡道,可以使扫地机器人本体停止前进或者重新计算新路线,防止扫地机器人本体从台阶坠落,提高了使用安全性,且该机构结构简单,运行可靠性高,不易出现故障。
技术研发人员:翟丽红
受保护的技术使用者:太原工业学院
技术研发日:20230116
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!