一种看管学习坐姿防近视机器人
本技术涉及一种工程领域,更具体的说是一种看管学习坐姿防近视机器人。
背景技术:
1、看管学习坐姿防近视机器人是一种常见的工程机械,例如专利号为cn217827157u的一种坐姿矫正器和坐姿矫正椅,该装置包括底板,底板上固设有支撑杆组件;支撑杆组件上设有一个或多个托架;该坐姿矫正器结构简单,包括支撑杆组件,和底板,支撑杆组件上设有多个用于阻挡身体前倾的托架;底板的上表面位于支撑杆组件的左右两侧分别设有供大腿放置的压合部,但是该装置不够灵活,且功能比较单一。
技术实现思路
1、本实用新型的目的是提供一种看管学习坐姿防近视机器人,可以限制头部位置,防止头侧倾,同时当人向前倾动时报警提示人坐姿不对,并监测人学习状态。
2、本实用新型的目的通过以下技术方案来实现:
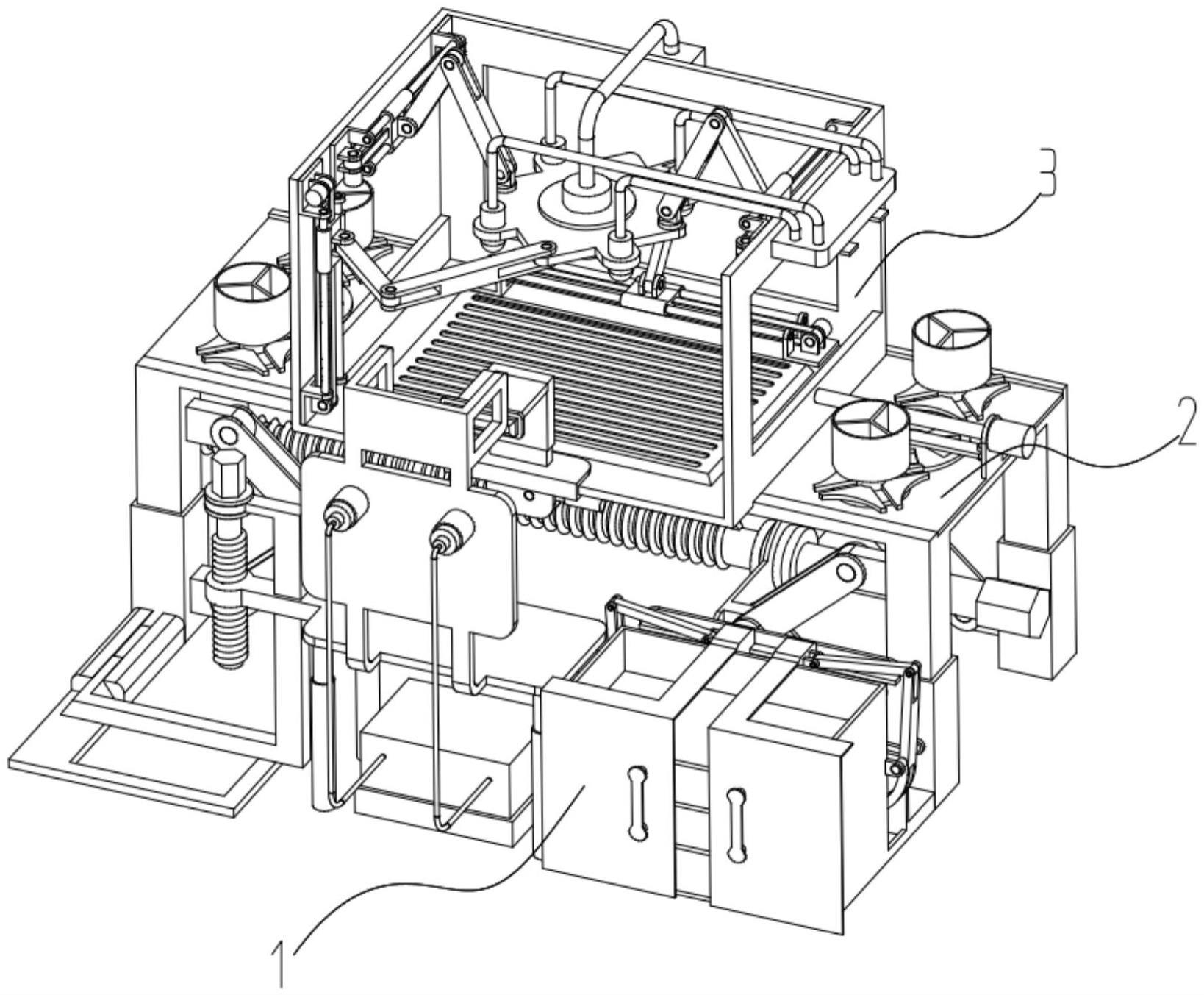
3、一种看管学习坐姿防近视机器人,包括功能桌,所述功能桌侧面安装有坐姿矫正装置,所述功能桌上端安装有学习监测装置。
4、作为本技术方案的进一步优化,本实用新型一种看管学习坐姿防近视机器人,所述坐姿矫正装置包括弯架,所述弯架与支架杆滑动连接,所述支架杆与座椅滑动连接,所述支架杆与螺杆一转动连接,所述螺杆一与座椅螺纹连接,所述座椅与靠背固定连接,所述靠背与移动杆滑动连接,所述移动杆与弹簧一固定连接,所述靠背与弹簧一固定连接,所述靠背与头部限位板固定连接,所述靠背与感应器固定连接,所述感应器与传输线一固定连接,所述传输线一与控制器固定连接,所述控制器与书架外壁固定连接,所述书架外壁与转杆一转动连接,所述转杆一与气缸一配合连接,所述转杆一与转杆二铰接连接,所述转杆二与滑架铰接连接,所述书架外壁与滑架滑动连接,所述转杆一与转杆三铰接连接,所述转杆三与滑块一铰接连接,所述书架外壁与滑块一滑动连接,所述滑块一与门板固定连接。
5、作为本技术方案的进一步优化,本实用新型一种看管学习坐姿防近视机器人,所述功能桌包括桌板架,所述桌板架与外腿架滑动连接,所述外腿架与转杆四铰接连接,所述桌板架与转杆五铰接连接,所述转杆四与转杆五铰接连接,所述转杆五与移动板铰接连接,所述移动板与螺杆二螺纹连接,所述桌板架与电机一固定连接,所述电机一与功能转盘一固定连接,所述功能转盘一与功能转盘二配合连接,所述功能转盘二与笔筒固定连接,所述弯架与外腿架固定连接,所述书架外壁与外腿架固定连接。
6、作为本技术方案的进一步优化,本实用新型一种看管学习坐姿防近视机器人,所述学习监测装置包括外架三,所述外架三与抵胸板固定连接,所述外架三与气缸二固定连接,所述外架三与学习板固定连接,所述外架三与电机二固定连接,所述电机二前端转轮与皮带一配合连接,所述皮带一与滑块二固定连接,所述滑块二与连接杆一转动连接,所述连接杆一与连接杆二铰接连接,所述连接杆二与移动板二转动连接,所述移动板二与摄像头固定连接,所述摄像头与传输线二固定连接,所述传输线二与控制器二固定连接,所述外架三与控制器二固定连接,所述移动板二与灯筒固定连接,所述灯筒与电线固定连接,所述电线与控制器三固定连接,所述外架三与控制器三固定连接,所述外架三与桌板架滑动连接,所述气缸二与桌板架固定连接。
7、本实用新型一种看管学习坐姿防近视机器人的有益效果为:
8、1.背部挤压带动移动杆向后移动,带动弹簧一被压缩,移动杆与感应器接触,并将此信息通过传输线一传递给控制器,当人向前倾动时,移动杆与感应器分离,这时报警提示人坐姿不对;
9、2.人头部置于头部限位板内,两个头部限位板对人头部有限位作用,防止头部侧歪,移动支架杆带动座椅,进而改变座椅位置,转动螺杆一带动座椅上升或下移,进而改变座椅的高度。
技术特征:
1.一种看管学习坐姿防近视机器人,包括功能桌(2),其特征在于:所述功能桌(2)侧面安装有坐姿矫正装置(1),所述功能桌(2)上端安装有学习监测装置(3);
2.根据权利要求1所述的一种看管学习坐姿防近视机器人,其特征在于:所述学习监测装置(3)包括外架三(301),所述外架三(301)与抵胸板(302)固定连接,所述外架三(301)与气缸二(303)固定连接,所述外架三(301)与学习板(304)固定连接,所述外架三(301)与电机二(305)固定连接,所述电机二(305)前端转轮与皮带一(306)配合连接,所述皮带一(306)与滑块二(307)固定连接,所述滑块二(307)与连接杆一(308)转动连接,所述连接杆一(308)与连接杆二(309)铰接连接,所述连接杆二(309)与移动板二(310)转动连接,所述移动板二(310)与摄像头(311)固定连接,所述摄像头(311)与传输线二(312)固定连接,所述传输线二(312)与控制器二(313)固定连接,所述外架三(301)与控制器二(313)固定连接,所述移动板二(310)与灯筒(314)固定连接,所述灯筒(314)与电线(315)固定连接,所述电线(315)与控制器三(316)固定连接,所述外架三(301)与控制器三(316)固定连接,所述外架三(301)与桌板架(201)滑动连接,所述气缸二(303)与桌板架(201)固定连接。
技术总结
本技术涉及一种工程领域,更具体的说是一种看管学习坐姿防近视机器人,包括功能桌,所述功能桌侧面安装有坐姿矫正装置,所述功能桌上端安装有学习监测装置,背部挤压带动移动杆向后移动,带动弹簧一被压缩,移动杆与感应器接触,并将此信息通过传输线一传递给控制器,当人向前倾动时,移动杆与感应器分离,这时报警提示人坐姿不对;人头部置于头部限位板内,两个头部限位板对人头部有限位作用,防止头部侧歪,移动支架杆带动座椅,进而改变座椅位置,转动螺杆一带动座椅上升或下移,进而改变座椅的高度。
技术研发人员:牟立萍,周明佳,李冰,林森,张娜,吴天柱
受保护的技术使用者:哈尔滨华德学院
技术研发日:20230213
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!