一种便于集尘的清洁机器人的制作方法
本技术涉及清洁设备,尤其涉及一种便于集尘的清洁机器人。
背景技术:
1、近年来,清洁机器人因其智能化程度较高而越来越受到人们的欢迎,清洁机器人为人们的生活带来了很大的便利,提高了人们的居住体验。清洁机器人配置有基站,清洁机器人停靠于基站时可以实现拖布自清洗、电池充电、集尘等功能,可以进一步减少用户的人为操作。为了实现集尘目的,尘盒一般设有排尘口和用于开闭排尘口的盖板,清洁机器人的内部设有用于连通排尘口和基站集尘口的除尘通道,集尘时,盖板在集尘气流的吸力作用下转动并打开排尘口,尘盒内的脏污通过排尘口、除尘通道和集尘口流向基站内的收集盒中。由于集尘气流对盖板的吸力作用需克服盖板的自重使盖板转动打开排尘口,并且,盖板转动后受集尘气流吸力作用的有效面积减小,盖板的转动幅度较小,导致排尘口的打开幅度较小,不利于提高集尘效率和保证集尘效果,从而不利于提高用户的使用体验。
技术实现思路
1、为了解决上述现有技术中存在的缺点和不足,本实用新型提供了一种便于集尘的清洁机器人,通过弹性件向集尘时的盖板施加打开排尘口的辅助作用力,可以增大盖板的转动幅度,从而可以增大排尘口在集尘时的打开幅度,有利于提高集尘效率和集尘效果。
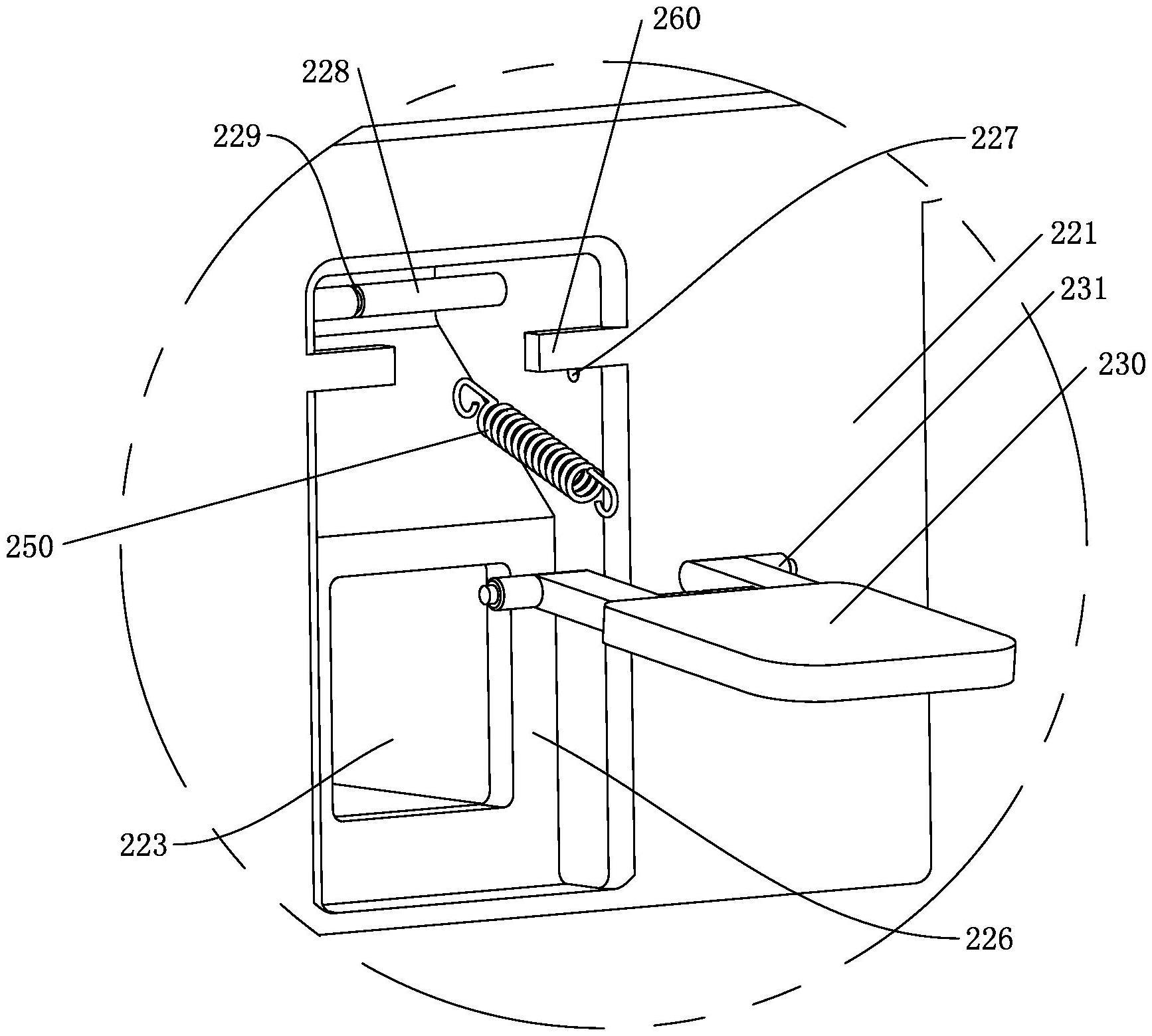
2、为了实现上述技术目的,本实用新型提供的一种便于集尘的清洁机器人,包括设有除尘通道的机体和设于机体内的吸尘组件,吸尘组件包括吸尘风机和尘盒,尘盒设有与除尘通道对应的排尘口和用于开闭排尘口的盖板,所述尘盒与盖板之间设有一端连接于尘盒、另一端连接于盖板的弹性件,弹性件在集尘气流通过除尘通道作用于盖板的集尘过程中向盖板施加打开排尘口的辅助作用力。
3、优选的,所述盖板设有止挡部,盖板转动至止挡部与尘盒抵触使盖板受到转动限位;和/或,所述尘盒设有止挡部,盖板转动至与止挡部抵触使盖板受到转动限位。
4、优选的,所述尘盒设有与弹性件的一端配合的第一轴柱,盖板设有与弹性件的另一端配合的第二轴柱,弹性件的两端分别钩住第一轴柱和第二轴柱。
5、优选的,所述第一轴柱上设有第一限位槽,弹性件的一端钩于第一轴柱的第一限位槽处;和/或,所述第二轴柱上设有第二限位槽,弹性件的另一端钩于第二轴柱的第二限位槽处。
6、优选的,所述盖板设有受弹性件的力矩为零的止点转角,弹性件被设置为在盖板的转动角度小于止点转角时向盖板施加关闭排尘口的辅助作用力,且在盖板的转动角度大于止点转角时向盖板施加打开排尘口的辅助作用力。
7、优选的,所述盖板通过凸轴铰接于尘盒,弹性件为弹簧,盖板转动至止点转角时凸轴、第一轴柱和第二轴柱位于同一平面上。
8、优选的,所述弹性件为扭簧,扭簧设有与第一轴柱连接的第一扭脚和与第二轴柱连接的第二扭脚,盖板转动至止点转角时与第二扭脚垂直。
9、优选的,所述尘盒的侧壁设有凹腔,关闭排尘口的盖板收容于凹腔中;和/或,所述除尘通道设有与尘盒对接配合的第一端口和设于机体侧壁上的第二端口,盖板位于第一端口的投影范围内。
10、优选的,所述盖板与尘盒之间设有用于辅助盖板向下回转关闭排尘口的磁吸结构。
11、优选的,所述尘盒设有与吸尘风机对应的通风口,通风口与排尘口设于尘盒的两个相对侧壁上,吸尘风机在集尘过程中提供自通风口流入尘盒内并流向排尘口的辅助集尘气流。
12、采用上述技术方案后,本实用新型具有如下优点:
13、1、本实用新型提供的清洁机器人,尘盒与盖板之间设置弹性件,集尘气流通过排尘通道作用于盖板的集尘过程中,弹性件向盖板施加打开排尘口的辅助作用力,通过该辅助作用力使打开排尘口的盖板受到一定的转动力矩,利用该转动力矩可以弥补因盖板受集尘气流吸力作用的有效面积减小而减小的力矩,可以增大盖板在打开排尘口时的转动幅度,从而可以增大排尘口在排尘时的打开幅度,有利于提高集尘效率和集尘效果,从而有利于提高用户的使用体验。
14、2、盖板和尘盒可以设置止挡部,通过止挡部使盖板在转动打开排尘口时受到转动限位,从而合理控制盖板的最大转动幅度,使盖板在集尘结束后可以顺利回转并关闭排尘口,避免盖板因转动幅度过大在集尘结束后无法回转关闭排尘口的情况。
15、3、弹性件的两端分别通过第一轴柱和第二轴柱连接于尘盒和盖板,合理设置弹性件与尘盒之间、弹性件与盖板之间的具体连接结构,降低组装难度的同时保证连接稳定性。
16、4、弹性件的一端钩于第一轴柱的第一限位槽处,弹性件的另一端钩于第二轴柱的第二限位槽处,通过与第一限位槽、第二限位槽的配合使弹性件的两端受到限位作用,提高弹性件的结构稳定性,有利于提高弹性件在集尘时向盖板施加辅助作用力的稳定性。
17、5、盖板转动至止点转角时,弹性件向盖板施加的力矩为零。盖板的转动角度小于止点转角时,弹性件向盖板施加关闭排尘口的辅助作用力,通过该辅助作用力使盖板在关闭排尘口时受到一定的阻尼作用,可以防止盖板因机体振动等原因发生晃动,有利于提高盖板在关闭排尘口时的稳定性。
18、6、弹性件可以采用弹簧,盖板转动至凸轴、第一轴柱和第二轴柱位于同一平面上时,弹簧对盖板的力矩作用为零,此时,盖板转动至止点转角。弹性件也可以采用扭簧,盖板转动至与第二扭脚垂直时,扭簧对盖板的力矩作用为零,此时,盖板转动至止点转角。合理设置弹性件的具体结构,并根据弹性件的具体结构合理确定盖板的止点转角,使弹性件可以在盖板转过一定角度后向盖板施加打开排尘口的辅助作用力。
19、7、关闭排尘口的盖板收容于尘盒侧壁上的凹腔中,使盖板在关闭排尘口时不会相对于尘盒的侧壁向外凸出,便于降低用户取装尘盒时的操作难度。盖板位于除尘通道第一端口的投影范围内,避免第一端口的内壁对盖板的转动造成干涉,使盖板在集尘气流的吸力作用下可以顺利转动并打开排尘口。
20、8、盖板与尘盒之间设置磁吸结构,集尘结束后,通过磁吸结构的磁吸力可以增大盖板回转关闭排尘口的转速,使盖板在集尘结束后能快速关闭排尘口。另外,通过磁吸结构可以提高盖板在关闭排尘口时的稳定性,避免盖板由于机体振动等原因在非集尘状态下打开排尘口的情况。
21、9、通风口与排尘口优选的设于尘盒的两个相对侧壁上,集尘时,吸尘风机提供自通风口流入尘盒内并流向排尘口的辅助集尘气流,流经尘盒内的辅助集尘气流可以将尘盒内的脏污吹向排尘口,有助于可以提高集尘气流的强度,有利于提高集尘效果和集尘效率。
技术特征:
1.一种便于集尘的清洁机器人,包括设有除尘通道的机体和设于机体内的吸尘组件,吸尘组件包括吸尘风机和尘盒,尘盒设有与除尘通道对应的排尘口和用于开闭排尘口的盖板,其特征在于,所述尘盒与盖板之间设有一端连接于尘盒、另一端连接于盖板的弹性件,弹性件在集尘气流通过除尘通道作用于盖板的集尘过程中向盖板施加打开排尘口的辅助作用力。
2.根据权利要求1所述的一种便于集尘的清洁机器人,其特征在于,所述盖板设有止挡部,盖板转动至止挡部与尘盒抵触使盖板受到转动限位;和/或,所述尘盒设有止挡部,盖板转动至与止挡部抵触使盖板受到转动限位。
3.根据权利要求1所述的一种便于集尘的清洁机器人,其特征在于,所述尘盒设有与弹性件的一端配合的第一轴柱,盖板设有与弹性件的另一端配合的第二轴柱,弹性件的两端分别钩住第一轴柱和第二轴柱。
4.根据权利要求3所述的一种便于集尘的清洁机器人,其特征在于,所述第一轴柱上设有第一限位槽,弹性件的一端钩于第一轴柱的第一限位槽处;和/或,所述第二轴柱上设有第二限位槽,弹性件的另一端钩于第二轴柱的第二限位槽处。
5.根据权利要求3所述的一种便于集尘的清洁机器人,其特征在于,所述盖板设有受弹性件的力矩为零的止点转角,弹性件被设置为在盖板的转动角度小于止点转角时向盖板施加关闭排尘口的辅助作用力,且在盖板的转动角度大于止点转角时向盖板施加打开排尘口的辅助作用力。
6.根据权利要求5所述的一种便于集尘的清洁机器人,其特征在于,所述盖板通过凸轴铰接于尘盒,弹性件为弹簧,盖板转动至止点转角时凸轴、第一轴柱和第二轴柱位于同一平面上。
7.根据权利要求5所述的一种便于集尘的清洁机器人,其特征在于,所述弹性件为扭簧,扭簧设有与第一轴柱连接的第一扭脚和与第二轴柱连接的第二扭脚,盖板转动至止点转角时与第二扭脚垂直。
8.根据权利要求1所述的一种便于集尘的清洁机器人,其特征在于,所述尘盒的侧壁设有凹腔,关闭排尘口的盖板收容于凹腔中;和/或,所述除尘通道设有与尘盒对接配合的第一端口和设于机体侧壁上的第二端口,盖板位于第一端口的投影范围内。
9.根据权利要求1所述的一种便于集尘的清洁机器人,其特征在于,所述盖板与尘盒之间设有用于辅助盖板向下回转关闭排尘口的磁吸结构。
10.根据权利要求1所述的一种便于集尘的清洁机器人,其特征在于,所述尘盒设有与吸尘风机对应的通风口,通风口与排尘口设于尘盒的两个相对侧壁上,吸尘风机在集尘过程中提供自通风口流入尘盒内并流向排尘口的辅助集尘气流。
技术总结
本技术公开了一种便于集尘的清洁机器人,属于清洁设备技术领域,包括设有除尘通道的机体和吸尘组件,吸尘组件包括吸尘风机和尘盒,尘盒设有排尘口和盖板,所述尘盒与盖板之间设有一端连接于尘盒、另一端连接于盖板的弹性件,弹性件在集尘气流通过除尘通道作用于盖板的集尘过程中向盖板施加打开排尘口的辅助作用力。通过弹性件向集尘时的盖板施加打开排尘口的辅助作用力,可以增大盖板的转动幅度,从而可以增大排尘口在集尘时的打开幅度,有利于提高集尘效率和集尘效果。
技术研发人员:朱泽春,宣子杰,李鹏,毛云龙
受保护的技术使用者:九阳股份有限公司
技术研发日:20230303
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!