无源排污装置及清洁系统的制作方法
本申请涉及清洁,特别是涉及一种无源排污装置及清洁系统。
背景技术:
1、相关技术中,拖地机器人在拖地过程中,会不断收集地面污水到拖地机器人的污水箱中,在拖地机器人回到基站后,污水箱与基站接通,通过基站的抽水泵将污水箱内的污水抽入基站内的集污箱内,集污箱水满后,基站会提示用户及时倒出集污箱内的污水。以上方案存在以上缺点:若集污箱内污水不及时倒出,集污箱内的微生物繁殖会导致发臭,且由于基站必须接入市电抽取污水箱内的污水,也即基站为有源基站,若对基站进行清洗,存在短路风险,因此不便于对基站进行清洗。
技术实现思路
1、本申请提供了一种无源排污装置及清洁系统,能够将污水直接排出到地漏,不存在无源排污装置内微生物繁殖导致发臭的问题,对无源排污装置进行清洁也不存在短路风险。
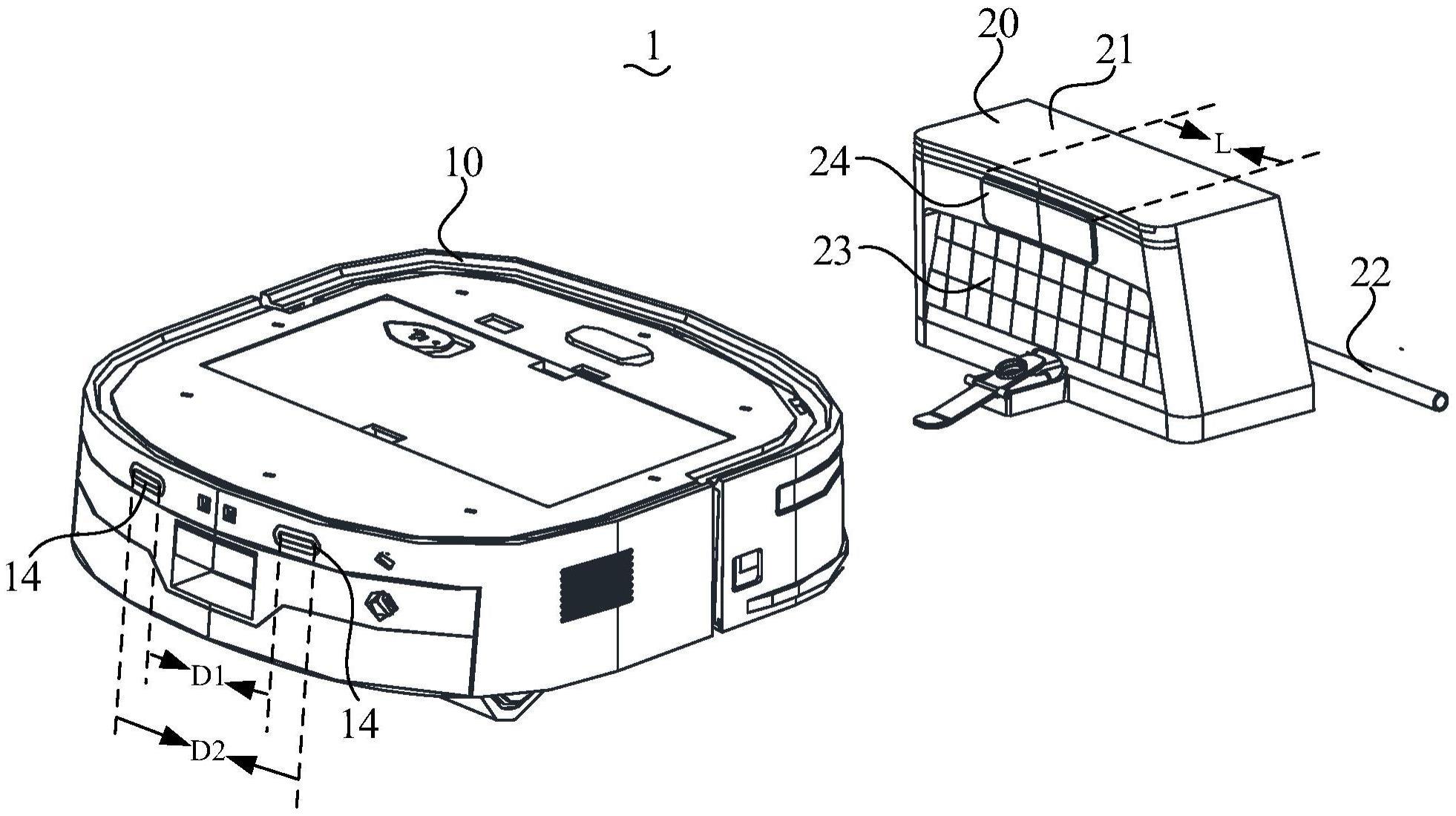
2、本申请第一方面提供一种无源排污装置,与清洁机器人分体设置,所述无源排污装置包括:
3、安装件,具有安装面;
4、排污管,与所述安装件连接,且具有排污接口;以及
5、无源标识件,设置于所述安装面,所述无源标识件适于在不接电的条件下被所述清洁机器人识别,以使所述清洁机器人能够在识别到所述无源标识件后移动至所述安装件处,并将所述清洁机器人的排污口与所述排污接口对接排污。
6、本申请第二方面提供一种清洁系统,包括
7、如上所述的无源排污装置;以及
8、清洁机器人,所述清洁机器人包括:
9、支撑件;
10、污水箱,设置于所述支撑件上,且具有所述排污口;以及
11、识别件,设置于所述支撑件上且位于所述污水箱外,所述识别件用于识别所述无源标识件,所述清洁机器人根据所述识别件的识别结果移动至所述安装件处,并将所述排污口与所述排污接口对接连通。
12、基于本申请提供的清洁系统及其无源排污装置,通过在安装件上设置排污管以及无源标识件,清洁机器人可以通过无源标识件获取安装件所在位置,并移动到安装件所在位置,以将清洁机器人的排污口与排污接口对接连通,进而将清洁机器人收集的污水直接通过排污管排出到地漏,如此,相比于相关技术中的有源基站,本实施例的无源排污装置由于直接将污水排出到地漏,无需像有源基站需及时将污水从集污箱中倒出,更不会存在集污箱内的微生物繁殖导致发臭的问题,且由于无源排污装置无需接电即可工作,可以直接对无源排污装置进行清洁,不存在接电的有源基站清洁过程中导致的短路风险。此外,由于无源排污装置无需具备相关技术中的有源基站的集污箱以及抽水泵,即可实现将清洁机器人中的污水排出到地漏,无源排污装置可以具有更小的体积,可以安装在更狭小的空间内,无源排污装置对安装空间的容积要求更小,因此安装位置可以具有更多选择。
技术特征:
1.一种无源排污装置,其特征在于,与清洁机器人分体设置,所述无源排污装置包括:
2.根据权利要求1所述的无源排污装置,其特征在于,所述无源标识件为能够被所述清洁机器人的激光雷达识别的激光反射贴或者凹凸结构,以使所述激光雷达能够通过霍夫变换原理以及最小二乘法拟合出所述激光反射贴或者所述凹凸结构对应的直线,进而得到所述激光反射贴或者所述凹凸结构在所述激光雷达内拟合出的位置;或者所述无源标识件为能够被所述清洁机器人的摄像头识别的颜色区域或者图案区域。
3.根据权利要求1所述的无源排污装置,其特征在于,还包括:
4.根据权利要求3所述的无源排污装置,其特征在于,所述无源对位件包括导电件、具有磁性的磁体或者红外光反射贴,在所述无源对位件包括所述红外光反射贴时,所述安装面具有安装孔,所述红外光反射贴贴设于所述安装孔的孔底。
5.根据权利要求1所述的无源排污装置,其特征在于,所述排污接口处设置有密封件,所述密封件用于在排污口以及所述排污接口对接连通后,密封所述排污口的口壁以及所述排污接口之间的间隙。
6.根据权利要求5所述的无源排污装置,其特征在于,所述安装件包括:
7.根据权利要求1-6任一项所述的无源排污装置,其特征在于,所述安装件还包括与所述安装面相背设置的背面,排污接口位于安装面所朝向的一侧,所述排污管自所述安装面所朝向的一侧贯穿所述安装面以及所述背面,并延伸至所述背面所朝向的一侧。
8.一种清洁系统,其特征在于,包括
9.根据权利要求8所述的清洁系统,其特征在于,所述识别件包括激光雷达和/或者摄像头。
10.根据权利要求8所述的清洁系统,其特征在于,
技术总结
本申请实施例公开了一种无源排污装置以及清洁系统,无源排污装置与清洁机器人分体设置,无源排污装置包括安装件、排污管以及无源标识件。安装件具有安装面;排污管与安装件连接,且具有排污接口;无源标识件设置于安装面,无源标识件适于在不接电的条件下被清洁机器人识别,以使清洁机器人能够在识别到无源标识件后移动至安装件处,并将清洁机器人的排污口与排污接口对接排污。通过无源排污装置,能够将污水直接排出到地漏,不存在无源排污装置内微生物繁殖导致发臭的问题,对无源排污装置进行清洁也不存在短路风险。此外,无源排污装置相比于相关技术中的有源基站也具有更小的体积。
技术研发人员:杨思其,桑晓庆,刘力源
受保护的技术使用者:安克创新科技股份有限公司
技术研发日:20230321
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!