一种人工智能扫地机器人的制作方法
本技术涉及人工智能,尤其涉及一种人工智能扫地机器人。
背景技术:
1、扫地机器人,又称自动打扫机、智能吸尘、机器人吸尘器等,是智能家用电器的一种,能凭借一定的人工智能,自动在房间内完成地板清理工作。一般采用刷扫和真空方式,将地面杂物先吸纳进入自身的垃圾收纳盒,从而完成地面清理的功能,一般来说,将完成清扫、吸尘、擦地工作的机器人,也统一归为扫地机器人。
2、现有的人工智能扫地机器人:
3、对比文件为cn214965107u公开了一种带有弹性缓冲结构的人工智能扫地机器人,“本实用新型公开了一种带有弹性缓冲结构的人工智能扫地机器人,包括机器人主体、前护罩、缓冲弹簧、固定条板、穿孔、固定块,本实用新型通过前护罩的设计,可以有效保护机器人的前端,提供弹性缓冲保护的同时减少碰撞损伤”。
4、但是,在本实用新型中前护罩弧形固定,只能对相对应弧形机器人进行安装,局限性较大,在进行前护罩进行安装时,现有本人拿着自家机器人主体进行对比安装,耗费时间较长。
技术实现思路
1、本实用新型的目的是为了解决现有技术中存在前护罩弧形固定,只能对相对应弧形机器人进行安装,局限性较大缺点,而提出的一种人工智能扫地机器人。
2、为了实现上述目的,本实用新型采用了如下技术方案:
3、一种人工智能扫地机器人,包括工作箱,所述工作箱上固定安装有第一双向电机,且第一双向电机上设置有夹持固定组件,所述工作箱一侧固定连接有放置u型箱,且放置u型箱上固定安装有第二双向电机,所述第二双向电机两侧输出轴上固定连接有传动轴,且传动轴上固定连接有第一锥齿轮,所述第一锥齿轮啮合连接有第二锥齿轮,且第二锥齿轮上设置有缓冲组件,所述夹持固定组件夹持固定有机器人主体,且机器人主体顶部一侧外表面上固定安装有操作显示屏。
4、优选的,所述夹持固定组件包括固定连接于第一双向电机两侧输出轴上的第一螺纹杆,且第一螺纹杆转动连接在工作箱上,所述第一螺纹杆上螺纹连接有夹持固定板,且夹持固定板内侧固定连接有防滑垫。
5、优选的,所述缓冲组件包括固定连接于第二锥齿轮上的第二螺纹杆,且第二螺纹杆上螺纹连接有螺纹套杆,所述螺纹套杆上固定连接有缓冲箱,且缓冲箱内壁上固定连接有弹簧,所述弹簧上固定连接有缓冲板。
6、优选的,所述机器人主体底部左侧对称设置有转动轴承,且转动轴承上固定连接有万向架,所述万向架上转动连接有移动滑轮,且机器人主体右侧固定安装有辅助轮。
7、优选的,所述机器人主体上固定安装有旋转电机,且旋转电机输出轴上固定连接有清扫杆,所述清扫杆转动连接在机器人主体上。
8、优选的,所述工作箱底部开设有滑槽,且夹持固定板滑动在滑槽内。
9、优选的,所述螺纹套杆滑动连接在放置u型箱上,且缓冲板滑动在缓冲箱上。
10、本实用新型中,所述一种人工智能扫地机器人有益效果:
11、由于设置了工作箱、第一双向电机、机器人主体、操作显示屏、第一螺纹杆、夹持固定板、防滑垫,启动第一双向电机,第一双向电机输出轴带动第一螺纹杆运作,第一螺纹杆带动夹持固定板移动,夹持固定板内侧夹持在机器人主体两侧上,使其可以根据实际情况进行固定缓冲组件,设置有防滑垫,使其可以防止滑落。
12、由于设置了放置u型箱、第二双向电机、传动轴、第一锥齿轮、第二锥齿轮、第二螺纹杆、螺纹套杆、缓冲箱、弹簧、缓冲板,启动第二双向电机,第二双向电机输出轴带动传动轴运作,传动轴带动第一锥齿轮运作,第一锥齿轮带动第二锥齿轮运作,第二锥齿轮带动第二螺纹杆运作,第二螺纹杆带动螺纹套杆移动,螺纹套杆带动缓冲箱移动,使其可以根据实际情况对缓冲箱进行安装,当撞到物品时,缓冲板压缩弹簧进行减震,防止机器人主体损坏。
13、由于设置了转动轴承、万向架、移动滑轮、辅助轮、旋转电机、清扫杆,启动旋转电机,旋转电机输出轴带动清扫杆运作,使其可以对地面进行清扫。
14、本实用新型能够可以根据实际情况对缓冲箱进行安装,当撞到物品时,缓冲板压缩弹簧进行减震,防止机器人主体损坏。
技术特征:
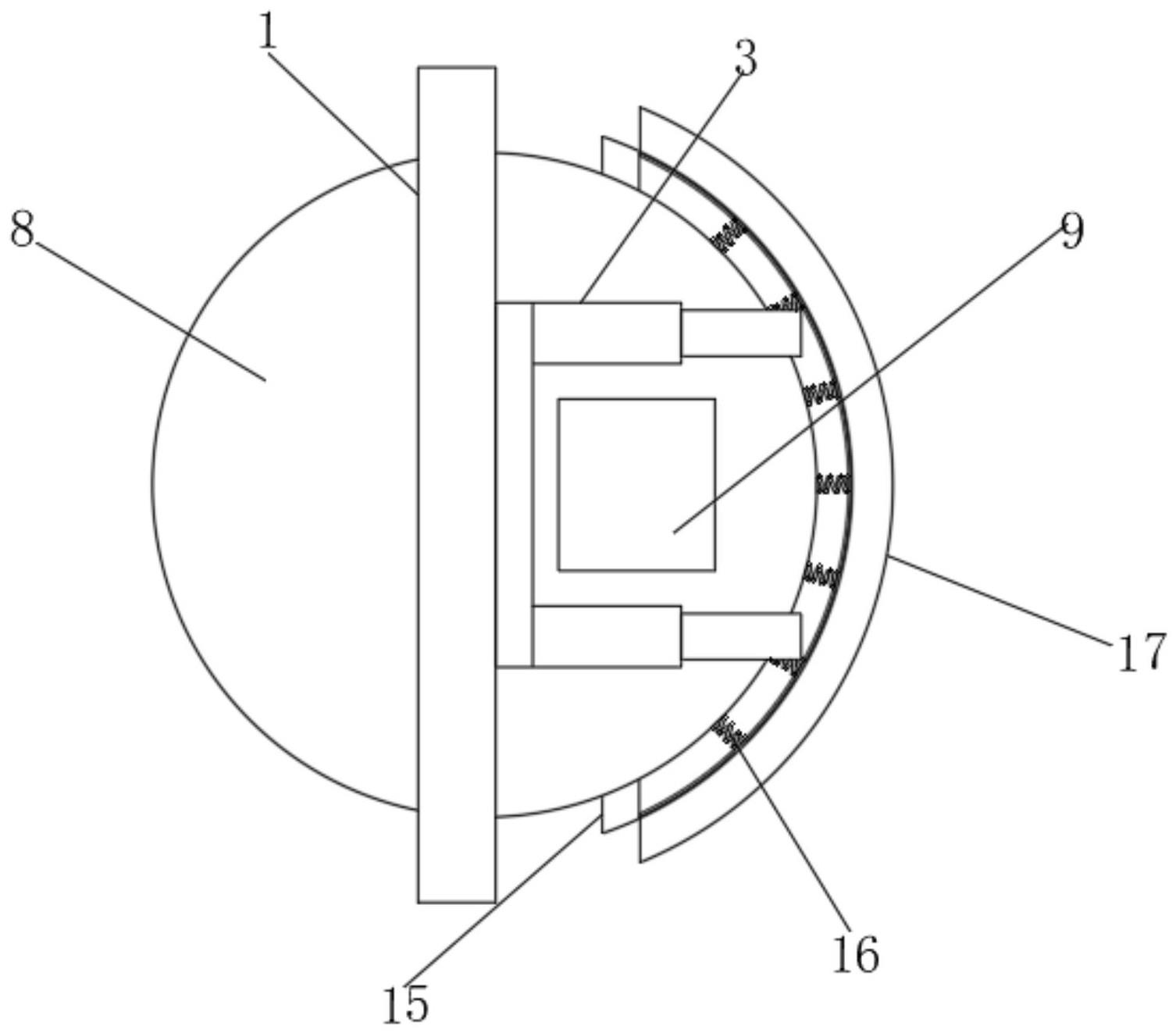
1.一种人工智能扫地机器人,包括工作箱(1),其特征在于,所述工作箱(1)上固定安装有第一双向电机(2),且第一双向电机(2)上设置有夹持固定组件,所述工作箱(1)一侧固定连接有放置u型箱(3),且放置u型箱(3)上固定安装有第二双向电机(4),所述第二双向电机(4)两侧输出轴上固定连接有传动轴(5),且传动轴(5)上固定连接有第一锥齿轮(6),所述第一锥齿轮(6)啮合连接有第二锥齿轮(7),且第二锥齿轮(7)上设置有缓冲组件,所述夹持固定组件夹持固定有机器人主体(8),且机器人主体(8)顶部一侧外表面上固定安装有操作显示屏(9)。
2.根据权利要求1所述的一种人工智能扫地机器人,其特征在于,所述夹持固定组件包括固定连接于第一双向电机(2)两侧输出轴上的第一螺纹杆(10),且第一螺纹杆(10)转动连接在工作箱(1)上,所述第一螺纹杆(10)上螺纹连接有夹持固定板(11),且夹持固定板(11)内侧固定连接有防滑垫(12)。
3.根据权利要求1所述的一种人工智能扫地机器人,其特征在于,所述缓冲组件包括固定连接于第二锥齿轮(7)上的第二螺纹杆(13),且第二螺纹杆(13)上螺纹连接有螺纹套杆(14),所述螺纹套杆(14)上固定连接有缓冲箱(15),且缓冲箱(15)内壁上固定连接有弹簧(16),所述弹簧(16)上固定连接有缓冲板(17)。
4.根据权利要求1所述的一种人工智能扫地机器人,其特征在于,所述机器人主体(8)底部左侧对称设置有转动轴承(18),且转动轴承(18)上固定连接有万向架(19),所述万向架(19)上转动连接有移动滑轮(20),且机器人主体(8)右侧固定安装有辅助轮(21)。
5.根据权利要求1所述的一种人工智能扫地机器人,其特征在于,所述机器人主体(8)上固定安装有旋转电机(22),且旋转电机(22)输出轴上固定连接有清扫杆(23),所述清扫杆(23)转动连接在机器人主体(8)上。
6.根据权利要求1所述的一种人工智能扫地机器人,其特征在于,所述工作箱(1)底部开设有滑槽(24),且夹持固定板(11)滑动在滑槽(24)内。
7.根据权利要求3所述的一种人工智能扫地机器人,其特征在于,所述螺纹套杆(14)滑动连接在放置u型箱(3)上,且缓冲板(17)滑动在缓冲箱(15)上。
技术总结
本技术属于人工智能领域,尤其是一种人工智能扫地机器人,针对现有的前护罩弧形固定,只能对相对应弧形机器人进行安装,局限性较大问题,现提出如下方案,其包括工作箱,所述工作箱上固定安装有第一双向电机,且第一双向电机上设置有夹持固定组件,所述工作箱一侧固定连接有放置U型箱,且放置U型箱上固定安装有第二双向电机,所述第二双向电机两侧输出轴上固定连接有传动轴,且传动轴上固定连接有第一锥齿轮,所述第一锥齿轮啮合连接有第二锥齿轮,且第二锥齿轮上设置有缓冲组件,本技术能够可以根据实际情况对缓冲箱进行安装,当撞到物品时,缓冲板压缩弹簧进行减震,防止机器人主体损坏。
技术研发人员:徐捷
受保护的技术使用者:北京捷通华声科技股份有限公司
技术研发日:20230404
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!