清洁基站和清洁系统的制作方法
本技术涉及清洁,特别涉及一种清洁基站和清洁系统。
背景技术:
1、相关技术的清洁基站是供清洁机器人充电、清理清洁机器人的零部件的设备。一般地,清洁基站具有开口,开口处设有安装在地面上的爬坡板,清洁机器人可以沿着爬坡板通过开口进入清洁基站内。然而,开口处于常打开状态,容易导致异物进入清洁基站内,影响基站的正常使用。
技术实现思路
1、本实用新型实施方式提供了一种清洁基站和清洁系统。
2、本实用新型实施方式的一种清洁基站,用于维护清洁机器人,所述清洁基站包括:
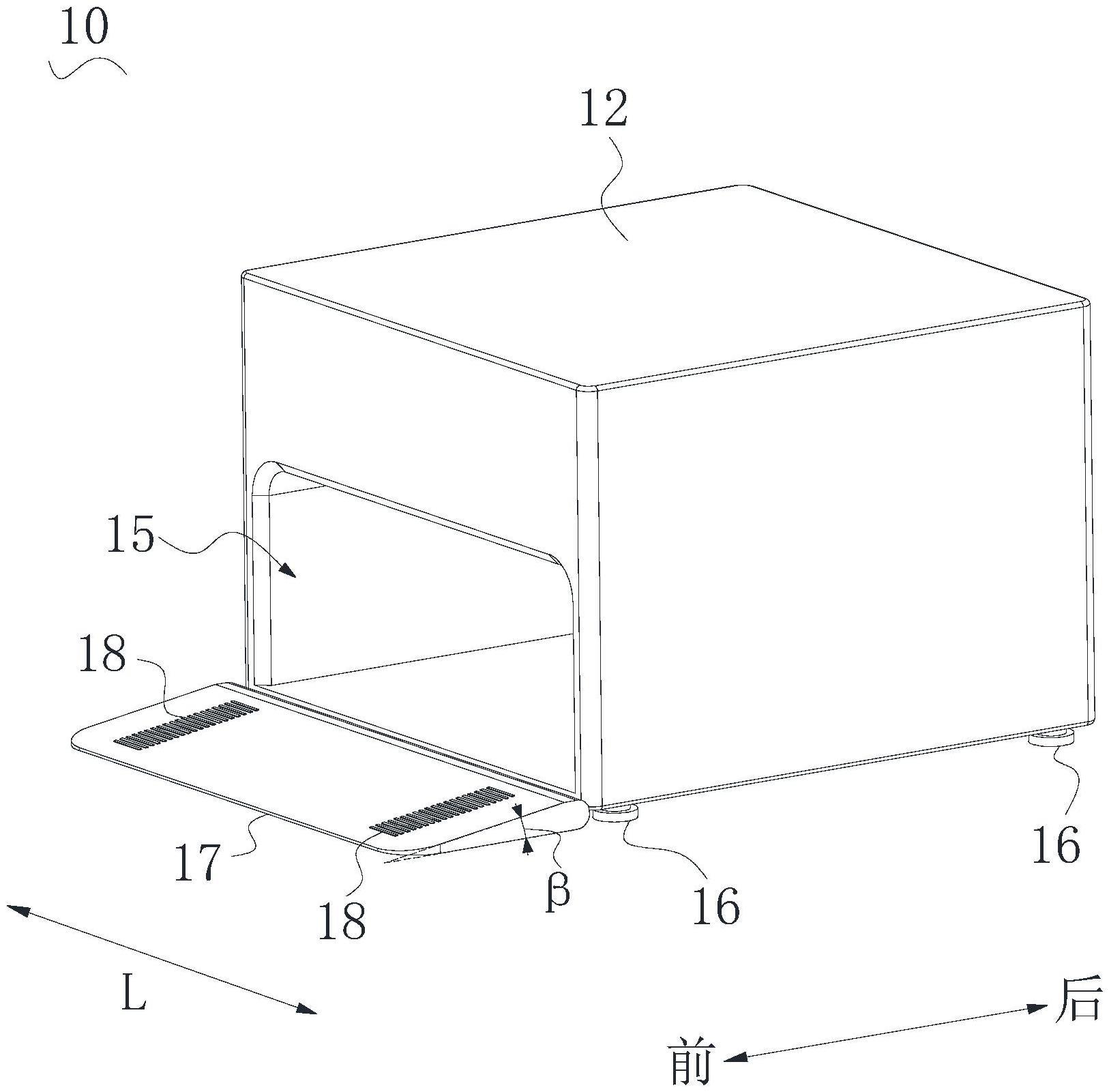
3、本体,所述本体形成有开口;
4、爬坡板,所述爬坡板转动设置在所述开口处,所述爬坡板被配置为承靠在地面上或相对于所述地面抬起。
5、上述清洁基站,通过将爬坡板转动设置在本体的开口处,使得清洁机器人需要通过开口进入清洁基站内时,可转动爬坡板承靠在地面上以打开开口,在不需要使用开口时,可转动爬坡板相对于地面抬起,从而可防止异物经过爬坡板进入清洁基站内而影响清洁基站正常工作,同时爬坡板抬起还可节省空间。
6、在某些实施方式中,所述爬坡板能够相对于所述地面转动抬起任意角度。
7、在某些实施方式中,所述爬坡板被配置为在所述清洁机器人进入所述清洁基站前承靠在所述地面上,在所述清洁机器人进入所述清洁基站后抬起。
8、在某些实施方式中,所述爬坡板被配置为在所述清洁机器人进入所述清洁基站或者离开所述清洁基站后相对于所述地面抬起。
9、在某些实施方式中,在所述爬坡板处于抬起状态的情况下,所述爬坡板能够封闭所述开口。
10、在某些实施方式中,在所述爬坡板封闭所述开口的情况下,所述爬坡板的表面与所述本体的前表面基本平齐。
11、在某些实施方式中,所述爬坡板从承靠所述地面的位置转动至封闭所述开口的位置的过程中,所述爬坡板转过的角度大于或等于90度。
12、在某些实施方式中,所述清洁基站还包括驱动机构,所述驱动机构用于驱动所述爬坡板相对于所述本体转动。
13、在某些实施方式中,所述爬坡板的坡度大于或等于10度。
14、在某些实施方式中,所述爬坡板为单块刚性板。
15、在某些实施方式中,所述本体的底部设置有调节支撑脚,所述调节支撑脚用于调节所述清洁基站的水平度。
16、本实用新型实施方式的一种清洁系统,包括上述任一个实施方式所述的清洁基站和清洁机器人,所述清洁机器人选择性地设置在所述清洁基站上。
17、上述清洁系统,通过将爬坡板转动设置在本体的开口处,使得清洁机器人需要通过开口进入清洁基站内时,可转动爬坡板承靠在地面上以打开开口,在不需要使用开口时,可转动爬坡板相对于地面抬起,从而可防止异物经过爬坡板进入清洁基站内而影响清洁基站正常工作,同时爬坡板抬起还可节省空间。
18、本实用新型的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本实用新型的实践了解到。
技术特征:
1.一种清洁基站,用于维护清洁机器人,其特征在于,所述清洁基站包括:
2.根据权利要求1所述的清洁基站,其特征在于,所述爬坡板能够相对于所述地面转动抬起任意角度。
3.根据权利要求1所述的清洁基站,其特征在于,所述爬坡板被配置为在所述清洁机器人进入所述清洁基站前承靠在所述地面上,在所述清洁机器人进入所述清洁基站后抬起。
4.根据权利要求1所述的清洁基站,其特征在于,所述爬坡板被配置为在所述清洁机器人进入所述清洁基站或者离开所述清洁基站后相对于所述地面抬起。
5.根据权利要求1所述的清洁基站,其特征在于,在所述爬坡板处于抬起状态的情况下,所述爬坡板能够封闭所述开口。
6.根据权利要求5所述的清洁基站,其特征在于,在所述爬坡板封闭所述开口的情况下,所述爬坡板的表面与所述本体的前表面基本平齐。
7.根据权利要求5所述的清洁基站,其特征在于,所述爬坡板从承靠所述地面的位置转动至封闭所述开口的位置的过程中,所述爬坡板转过的角度大于或等于90度。
8.根据权利要求1所述的清洁基站,其特征在于,所述清洁基站还包括驱动机构,所述驱动机构用于驱动所述爬坡板相对于所述本体转动。
9.根据权利要求1所述的清洁基站,其特征在于,所述爬坡板的坡度大于或等于10度。
10.根据权利要求1所述的清洁基站,其特征在于,所述爬坡板为单块刚性板。
11.根据权利要求1所述的清洁基站,其特征在于,所述本体的底部设置有调节支撑脚,所述调节支撑脚用于调节所述清洁基站的水平度。
12.一种清洁系统,其特征在于,包括权利要求1-11任一项所述的清洁基站和清洁机器人,所述清洁机器人选择性地设置在所述清洁基站上。
技术总结
本技术公开了一种清洁基站和清洁系统。清洁基站用于清洁机器人,清洁基站包括:本体,本体形成有开口;爬坡板,爬坡板转动设置在开口处,爬坡板被配置为承靠在地面上或相对于地面抬起。上述清洁基站,通过将爬坡板转动设置在本体的开口处,使得清洁机器人需要通过开口进入清洁基站内时,可转动爬坡板承靠在地面上以打开开口,在不需要使用开口时,可转动爬坡板相对于地面抬起,从而可防止异物经过爬坡板进入清洁基站内而影响清洁基站正常工作,同时爬坡板抬起还可节省空间。
技术研发人员:徐建强,张伟,张鼎,孙涛
受保护的技术使用者:美智纵横科技有限责任公司
技术研发日:20230428
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!