清洁机器人的制作方法
本技术涉及服务机器人,具体地,涉及一种清洁机器人。
背景技术:
1、清洁机器人是一种能够自主完成清洁任务的机器人,可以代替人工进行家庭或公共场所的清洁工作,但是,现有的清洁机器人普遍存在识别能力和反应能力不足等问题,导致其面对环境元素多变的应用场所时,难以精准地对障碍物和清理对象进行感知和识别,从而容易引发错误操作,可靠性较低。
技术实现思路
1、针对现有技术的上述至少一种缺陷或不足,本实用新型提供了一种清洁机器人,具备出色的识别能力和反应能力,有利于满足运行可靠性、安全性和智能化需求。
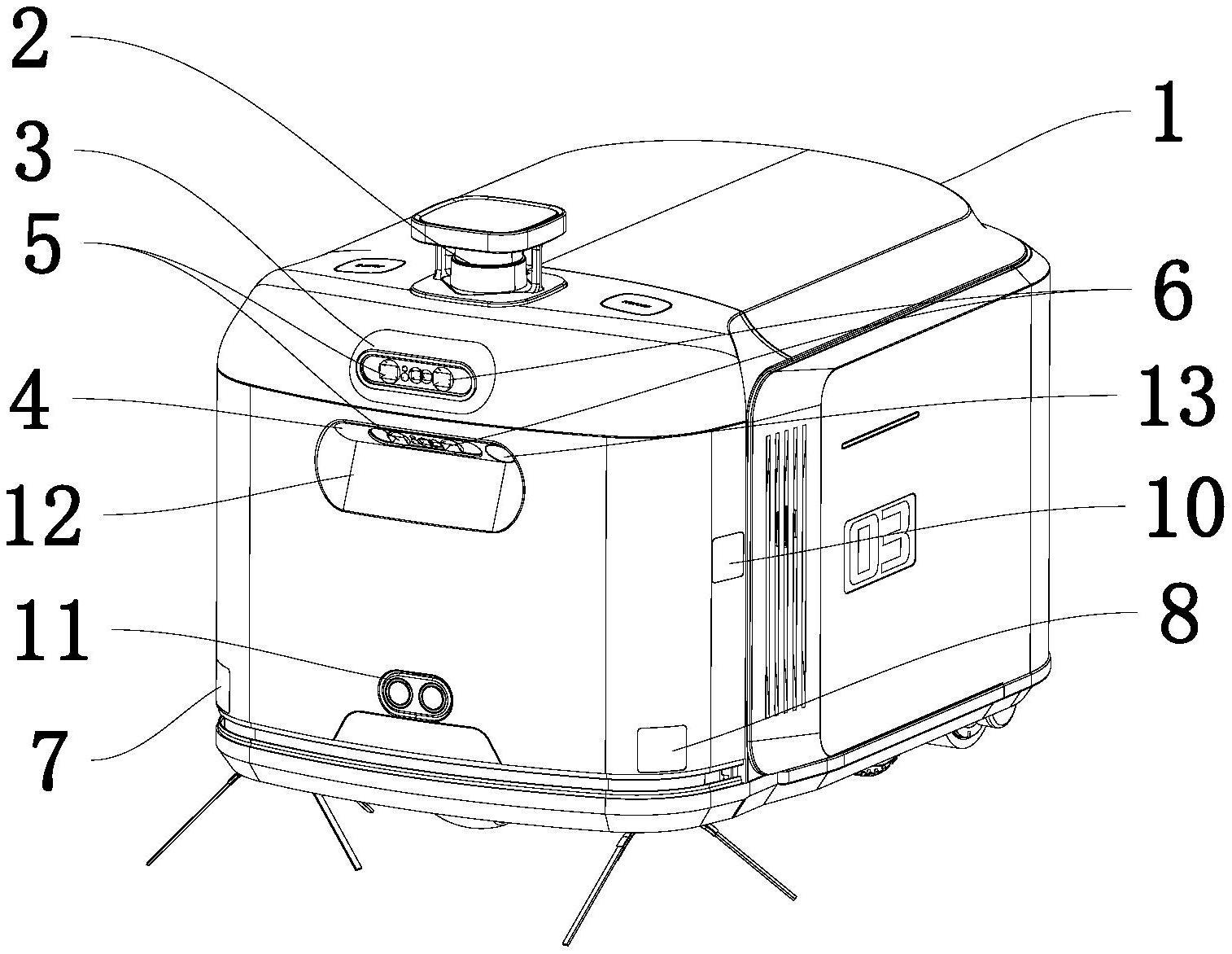
2、为实现上述目的,本实用新型提供了一种清洁机器人,所述清洁机器人包括:机器人主体;激光雷达,设置在所述机器人主体的顶面且用于测量自身与四周的障碍物的水平距离;前方平视相机模组,设置在所述机器人主体的前侧面且用于获取前方可视范围内的深度信息和图像信息;和前方俯视相机模组,设置在所述机器人主体的前侧面且布置在所述前方平视相机模组的下方,所述前方俯视相机模组用于获取前下方可视范围内的深度信息和图像信息;所述前方平视相机模组的所述前方可视范围和所述前方俯视相机模组的所述前下方可视范围共同覆盖所述激光雷达的下方测量盲区。
3、可选地,所述前方平视相机模组和所述前方俯视相机模组均形成为包括深度相机和rgb相机的rgbd模组,同一个所述rgbd模组中的所述深度相机和所述rgb相机沿左右方向间隔设置。
4、进一步的,所述前方平视相机模组和前方俯视相机模组均采用由双目结构光相机与rgb相机组合的rgbd模组;或者所述前方平视相机模组采用由tof相机与rgb相机组合的rgbd模组,所述前方俯视相机模组采用由双目结构光相机与rgb相机组合的rgbd模组。
5、可选地,所述清洁机器人还包括固定连接于所述机器人主体的折弯板,所述折弯板包括用于安装所述前方平视相机模组的竖板部和用于安装所述前方俯视相机模组的斜板部。
6、进一步的,所述机器人主体包括前壳体,所述水平激光雷达设置在所述前壳体的顶壁,所述折弯板安装在所述前壳体的内侧壁。
7、可选地,所述清洁机器人还包括:第一沿边传感器,设置在所述机器人主体的前侧面的左侧底部且用于感知自身与左前方墙面之间的距离;第二沿边传感器,设置在所述机器人主体的前侧面的右侧底部且用于感知自身与右前方墙面之间的距离。
8、可选地,所述清洁机器人还包括第一补盲传感器,设置在所述机器人主体的左侧面且用于感知自身与左方墙面之间的距离;第二补盲传感器,设置在所述机器人主体的右侧面且用于感知自身与右方墙面之间的距离。
9、可选地,所述第一补盲传感器和所述第二补盲传感器位于相同高度且高于所述第一沿边传感器和所述第二沿边传感器设置。
10、可选地,所述清洁机器人还包括低矮障碍物感应器,设置在所述机器人主体的前侧面的底部且用于感应位于所述清洁机器人的前方的低矮障碍物。
11、可选地,所述清洁机器人还包括设置在所述机器人主体的前侧面的前视补光灯,所述前视补光灯与所述前方俯视相机模组沿左右方向间隔设置。
12、通过上述技术方案,本实用新型的清洁机器人在运行过程中,利用水平激光雷达,能够扫描周围环境,以获取清洁机器人相对周围物体相对位置信息,从而可以帮助清洁机器人完成导航、避障、清理等反应动作,同时,利用前方平视相机模组和前方俯视相机模组在垂直平面内的多角度拍摄,增加对环境的感知范围,实现更加精准的三维感知和识别,提高清洁机器人对物体识别、姿态估计、虚拟现实等应用的准确性和鲁棒性。整体而言,通过水平激光雷达与前方平视相机模组、前方俯视相机模组的协同监测作业,能够提高清洁机器人的识别能力和反应能力,从而提高清洁机器人的可靠性和智能化程度。
13、本实用新型的其它特征和优点将在随后的具体实施方式部分予以详细说明。
技术特征:
1.一种清洁机器人,其特征在于,所述清洁机器人包括:
2.根据权利要求1所述的清洁机器人,其特征在于,所述前方平视相机模组(3)和所述前方俯视相机模组(4)均为包括深度相机(5)和rgb相机(6)的rgbd模组,同一个所述rgbd模组中的所述深度相机(5)和所述rgb相机(6)沿左右方向间隔设置。
3.根据权利要求2所述的清洁机器人,其特征在于,所述前方平视相机模组(3)和前方俯视相机模组(4)均采用由双目结构光相机与rgb相机组合的rgbd模组;或者所述前方平视相机模组(3)采用由tof相机与rgb相机组合的rgbd模组,所述前方俯视相机模组(4)采用由双目结构光相机与rgb相机组合的rgbd模组。
4.根据权利要求1所述的清洁机器人,其特征在于,所述清洁机器人还包括固定安装于所述机器人主体(1)的折弯板(12),所述折弯板(12)包括用于安装所述前方平视相机模组(3)的竖板部(12a)和用于安装所述前方俯视相机模组(4)的斜板部(12b)。
5.根据权利要求4所述的清洁机器人,其特征在于,所述机器人主体(1)包括前壳体(1a),所述水平激光雷达(2)安装在所述前壳体(1a)的顶壁面,所述折弯板(12)安装在所述前壳体(1a)的内侧壁。
6.根据权利要求1所述的清洁机器人,其特征在于,所述清洁机器人还包括:
7.根据权利要求6所述的清洁机器人,其特征在于,所述清洁机器人还包括:
8.根据权利要求7所述的清洁机器人,其特征在于,所述第一补盲传感器(9)和所述第二补盲传感器(10)位于相同高度且高于所述第一沿边传感器(7)和所述第二沿边传感器(8)设置。
9.根据权利要求1所述的清洁机器人,其特征在于,所述清洁机器人还包括:
10.根据权利要求1所述的清洁机器人,其特征在于,所述清洁机器人还包括设置在所述机器人主体(1)的前侧面的前视补光灯(13),所述前视补光灯(13)与所述前方俯视相机模组沿左右方向间隔设置。
技术总结
本技术属于服务机器人领域,公开了一种清洁机器人,该清洁机器人包括机器人主体、水平激光雷达、前方平视相机模组和前方俯视相机模组,其中,水平激光雷达设置在机器人主体的顶面且用于测量自身与四周的障碍物的水平距离;前方平视相机模组设置在机器人主体的前侧面且用于获取前方可视范围内的深度信息和图像信息;前方俯视相机模组设置在机器人主体的前侧面且布置在前方平视相机模组的下方,前方俯视相机模组用于获取前下方可视范围内的深度信息和图像信息。本技术的清洁机器人具备出色的识别能力和反应能力,满足作业可靠性、安全性和智能化需求。
技术研发人员:覃世广,张东文,吕家豪
受保护的技术使用者:广东美房智高机器人有限公司
技术研发日:20230627
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!