扫地机器人系统的制作方法
本技术涉及扫地机器人领域,特别涉及一种扫地机器人系统。
背景技术:
1、市面上的扫地机器人针对散热通常采用两种方案。
2、方案一为被动散热,在热源附近设置金属件,把热源通过金属件传导到扫地机器人的外表面,从而依靠环境散热。此方案增加了物料以及组装成本,同时还增加了整机的重量。
3、方案二为主动散热,依靠主机内部的吸尘风机,通过吸尘风机的出风腔对着热源吹风,加快热源的散热。此方案中吸尘风机吹出的风会带有湿气和灰尘,湿气会使整机内部的空间潮湿,导致电机生锈等异常,同时会导致主机控制板的短路等风险。灰尘会使机壳内部脏污,同时也会导致控制板和电机等短路。
技术实现思路
1、为了解决以上技术问题,本实用新型提供了一种扫地机器人系统,其将第二清洁组件中的热量经由散热钣金引导至第一清洁组件的吸尘风道中,以利用第一清洁组件的出风风道将热量传导至扫地机器人的壳体以外,从而利用扫地机器人内部已有的吸尘风机实现散热的目的,而且避免了吸尘风机对热源的直吹。
2、本实用新型的一个实施例中提供了一种扫地机器人系统,包括:
3、壳体,所述壳体的底面具有用于第一清洁组件的吸尘口和用于第二清洁组件的清洁布;
4、清洁模组,所述清洁模组包括第一清洁组件和第二清洁组件,其中,所述第一清洁组件其设置在所述壳体内,包括:吸尘风机,连接于所述吸尘口和所述吸尘风机的进风口之间的吸尘风道,以及连接于所述吸尘风机的出风口和所述壳体表面之间的出风风道;所述第二清洁组件,设置在所述壳体内,包括:拖地电机,其用于驱动所述清洁布旋转以拖刷地面;
5、散热钣金,所述散热钣金的一端贴敷于所述拖地电机的外表面,另一端伸入至所述吸尘风道内,以将所述拖地电机的热量传导散发;
6、其中,所述清洁模组运行为:所述吸尘风机运行以形成自所述吸尘口流向所述出风风道的气流,以经由所述吸尘口吸取地面尘土;和/或
7、所述拖地电机运行,以驱动所述清洁布旋转以拖刷地面。
8、在一个实施例中,所述第一清洁组件包括:
9、集尘袋,所述集尘袋位于所述吸尘风道与所述吸尘口之间;和
10、过滤器,所述过滤器装设于所述集尘袋与吸尘风道的连接处;
11、所述第一清洁组件运行为:所述吸尘风机运行以形成自所述吸尘口流向所述出风风道的气流,以经由所述吸尘口吸取地面尘土,所述地面尘土留取在所述集尘袋内,去除所述地面尘土的气流经过所述散热钣金,并将所述散热钣金的热量经由所述出风风道散发至所述壳体外部。
12、在一个实施例中,所述吸尘风道沿水平方向延伸,所述吸尘风机的进风口与所述吸尘风道的顶部连通;
13、其中,所述吸尘风机的转动轴与竖直方向形成锐角夹角。
14、在一个实施例中,包括:
15、温度传感器,所述温度传感器检测所述散热钣金的温度,且具有温度阈值;
16、所述清洁模组运行为:所述拖地电机运行,以驱动所述清洁布旋转以拖刷地面;和
17、所述吸尘风机响应于所述温度传感器的高于所述温度阈值的预警信号而运行,以形成自所述吸尘口流向所述出风风道的气流,将所述散热钣金的热量经由所述出风风道散发至所述壳体外部。
18、在一个实施例中,所述清洁模组运行为:所述拖地电机运行,以驱动所述清洁布旋转以拖刷地面;和
19、所述吸尘风机以小于最大功率的第一功率运行,以形成自所述吸尘口流向所述出风风道的气流,将所述散热钣金的热量经由所述出风风道散发至所述壳体外部。
20、在一个实施例中,所述第一功率小于等于所述最大功率的一半。
21、在一个实施例中,所述拖地电机的第二转动轴线沿水平方向延伸,所述拖地电机的输出轴自所述拖地电机的两端伸出;
22、所述第二清洁组件包括:
23、一对齿轮箱,所述一对齿轮箱分别设置于所述拖地电机的两端,以分别连接于所述拖地电机的输出轴,所述清洁布在所述齿轮箱的带动下旋转。
24、在一个实施例中,所述拖地电机与所述吸尘风机在水平方向上位于同一平面内。
25、在一个实施例中,所述散热钣金包括:
26、卷绕部,所述卷绕部包裹所述拖地电机的外周,以吸收所述拖地电机的热量;
27、水平部,所述水平部的第一端与所述卷绕部连接,且沿着所述吸尘风道水平延伸;
28、固定部,所述固定部与所述水平部的第二端连接,以用于与所述吸尘风道固定连接。
29、在一个实施例中,所述散热钣金包括:
30、第一倾斜部,所述第一倾斜部连接于所述卷绕部和水平部之间,所述第一倾斜部形成下倾的角度,以使所述水平部延伸于所述吸尘风机的下方。
31、在一个实施例中,所述卷绕部至少覆盖所述拖地电机的外周表面积的一半。
32、在一个实施例中,所述出风风道位于一个所述齿轮箱的上方。
33、在一个实施例中,所述吸尘风机的出风口位于所述吸尘风机的周缘;
34、所述吸尘风机的转动轴与竖直方向形成锐角夹角,所述出风风道与所述吸尘风机的高端的周缘相接。
35、由以上技术方案可知,在本实施例中,将第一清洁组件中的吸尘风机作为为第二清洁组件中的拖地电机提供散热气流的电机,但是拖地电机并不处于吸尘风机的气流通道内,而是避让吸尘风机,以避免吸尘风机的气流面向拖地电机直吹,且吸尘风机产生的气流在壳体内部全部处于封闭的通道内,由此,即使吸尘风机所制造的散热气流夹带尘土和湿气,其也会由于在壳体内部被通道封闭隔离而不会对壳体内部的其他元件造成污染和腐蚀。
36、由于拖地电机需要避让吸尘风机的气流通道,为了利用吸尘风机产生的吸尘气流进行拖地电机的散热,在本实施例中提供了散热钣金,其采用热量的良导体材料制造,且连接于拖地电机与吸尘风机的气流通道之间,以将拖地电机的热量自吸尘电机的气流通道之外转移至气流通道以内,从而利用吸尘风机产生的吸尘气流将拖地电机产生的热量直接地送至壳体以外,以实现良好的散热效果。
37、本实施例中,第二清洁组件作为主要的热源,但并不在第二清洁组件内部增加用于散热的元件,特别是电机,而是利用另一清洁组件——第一清洁组件中的吸尘风机为第二清洁组件提供散热。第一清洁组件和第二清洁组件相互隔离,且第一清洁组件的气流通道通过封闭的结构与壳体内部的其他元件相隔离,第一清洁组件和第二清洁组件之间通过散热钣金进行连接,以实现共用的散热效果。本实施例中的扫地机器人系统仅通过增加一个散热钣金即可实现用于第二清洁组件的散热方案,同时通过第一清洁组件的吸尘风机的复用而降低了产品改造升级所需的物料成本和组装成本,且散热钣金可实现为薄片式结构,且可沿着壳体内部的结构件设置,不会改变扫地机器人系统的内部布局和整体结构,也不会对整体的重量造成显著的增加。
技术特征:
1.一种扫地机器人系统,其特征在于,包括:
2.根据权利要求1所述的扫地机器人系统,其特征在于,所述第一清洁组件包括:
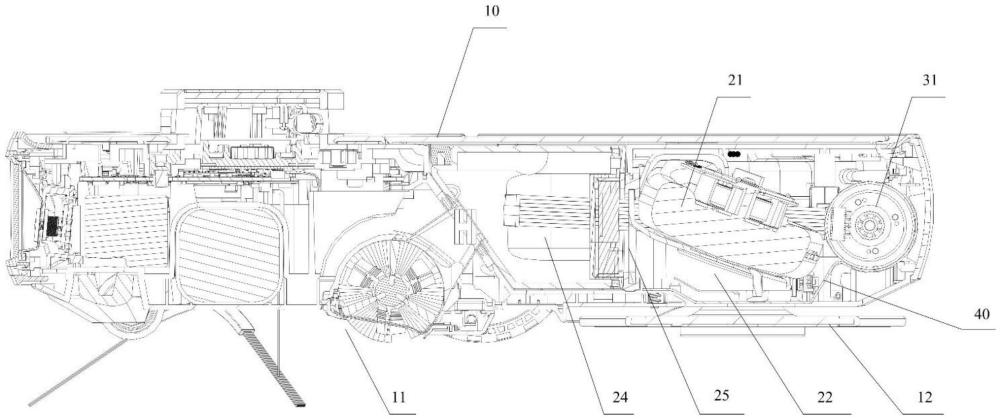
3.根据权利要求1所述的扫地机器人系统,其特征在于,所述吸尘风道(22)沿水平方向延伸,所述吸尘风机(21)的进风口与所述吸尘风道(22)的顶部连通;
4.根据权利要求1所述的扫地机器人系统,其特征在于,包括:
5.根据权利要求1所述的扫地机器人系统,其特征在于,所述清洁模组运行为:所述拖地电机(31)运行,以驱动所述清洁布(12)旋转以拖刷地面;和
6.根据权利要求5所述的扫地机器人系统,其特征在于,所述第一功率小于等于所述最大功率的一半。
7.根据权利要求1所述的扫地机器人系统,其特征在于,所述拖地电机(31)的第二转动轴线沿水平方向延伸,所述拖地电机(31)的输出轴自所述拖地电机(31)的两端伸出;
8.根据权利要求7所述的扫地机器人系统,其特征在于,所述拖地电机(31)与所述吸尘风机(21)在水平方向上位于同一平面内。
9.根据权利要求8所述的扫地机器人系统,其特征在于,所述散热钣金(40)包括:
10.根据权利要求9所述的扫地机器人系统,其特征在于,所述散热钣金(40)包括:
11.根据权利要求9所述的扫地机器人系统,其特征在于,所述卷绕部(41)至少覆盖所述拖地电机(31)的外周表面积的一半。
12.根据权利要求8所述的扫地机器人系统,其特征在于,所述出风风道(23)位于一个所述齿轮箱(32)的上方。
13.根据权利要求12所述的扫地机器人系统,其特征在于,所述吸尘风机(21)的出风口位于所述吸尘风机(21)的周缘;
技术总结
本技术提供一种扫地机器人系统,包括:壳体,其底面具有吸尘口和清洁布;清洁模组,包括第一清洁组件和第二清洁组件,其中,第一清洁组件设置在壳体内,包括:吸尘风机,连接于吸尘口和吸尘风机的进风口之间的吸尘风道,以及连接于吸尘风机的出风口和壳体表面之间的出风风道;第二清洁组件,设置在壳体内,包括:拖地电机,其用于驱动清洁布旋转以拖刷地面;散热钣金,散热钣金的一端贴敷于拖地电机的外表面,另一端伸入至吸尘风道内,以形成将拖地电机的热量散发至壳体以外的散热通道;其中,清洁模组运行为:吸尘风机运行以形成自吸尘口流向出风风道的气流,以经由吸尘口吸取地面尘土;和/或拖地电机运行,以驱动清洁布旋转以拖刷地面。
技术研发人员:张乐乐,金静阳,孟向伟,王彬
受保护的技术使用者:杭州萤石软件有限公司
技术研发日:20230713
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!