一种智能护理机器人的护臂调节组件的制作方法
本技术属于护理设备,尤其涉及一种智能护理机器人的护臂调节组件。
背景技术:
1、护理机器人(又称护理马桶)是对病残者进行护理服务(即如厕服务)的机器人,在当今时代的发展下,人口老龄化问题日益突出以及残疾人口数量居高不下将是世界各国的主要负担,而针对于老年人以及残疾人的日常生活照料是当下面临的主要困难,因此移动式的护理马桶因此而生,避免了待护理人需要如厕时,需要前去卫生间,避免中途发生跌倒等意外的情况发生。
2、如中国专利申请号为(cn202221846587.4)公开了一种可移动式适老马桶,该申请通过在马桶下方设置万向轮,从而便于对马桶进行移动,但并未设置扶手,老人如厕时安全性较低,又如中国专利专利申请号为(cn202122957028.2)公开了一种老人护理用新型马桶架,该申请虽然设置了扶手,但待护理人在坐上护理马桶时需要先面向护理马桶,这就需要待护理人需要进行较大的转身(即180°转身),较为不便,而将护理马桶侧面朝向待护理人时,无法调节的扶手设置会对待护理人坐上护理马桶造成阻碍,因此需要一款能够对扶手进行调节护理马桶。
技术实现思路
1、本实用新型的目的是针对上述存在的技术问题,提供一种智能护理机器人的护臂调节组件,达到了在待护理人坐上马桶时,可以缩进,提高便捷性,并在待护理人坐上马桶后,扶手恢复,提高其如厕的安全性。
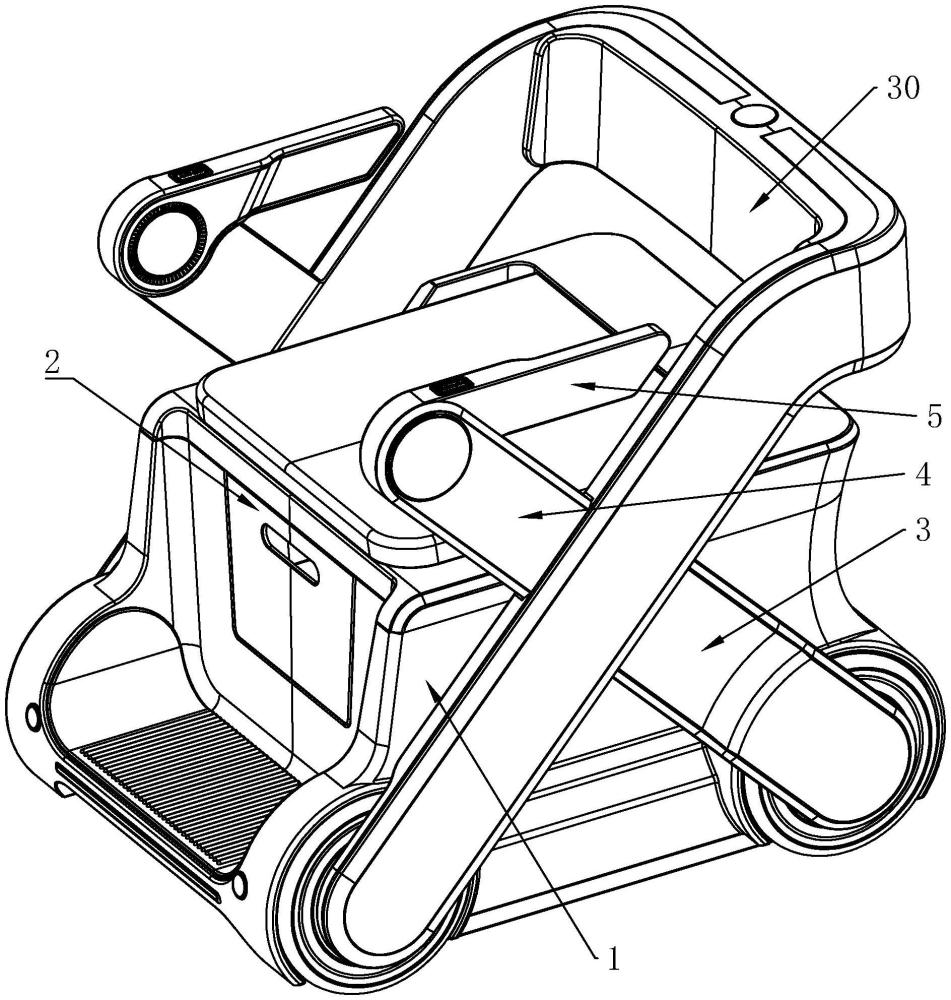
2、有鉴于此,本实用新型提供一种智能护理机器人的护臂调节组件,包括:
3、壳体,壳体上安装有护理机器人,底部安装有用于移动的移动装置;
4、护臂本体,护臂本体安装在壳体两侧面,并在壳体后侧弯曲形成靠背部;
5、伸缩部,伸缩部安装在护臂本体前侧;
6、驱动装置,驱动装置安装在壳体内,且延伸至护臂本体内用于驱动伸缩部伸出和缩进。
7、在上述技术方案中,进一步的,还包括:
8、支撑部,支撑部铰连接在伸缩部远离护臂本体的一端,并在铰连接处设有扭簧;
9、支角,支角位于伸缩部与支撑部铰连接处的侧面,且用于支撑支撑部;
10、其中,护臂本体呈倒y形,且支撑部向护臂本体一侧延伸,并与伸缩部及护臂本体形成倒三角形。
11、在上述技术方案中,进一步的,驱动装置包括:
12、第一滑腔,第一滑腔开设在护臂本体内,且伸缩部在第一滑腔内滑动连接;
13、电机,电机安装在壳体内,且输出端延伸至护臂本体内的第一滑腔,并安装有驱动齿轮;
14、齿条,齿条一端与伸缩部连接,另一端与驱动齿轮啮合。
15、在上述技术方案中,进一步的,驱动装置还包括:
16、保持架,保持架安装在驱动齿轮侧面,且一端与伸缩部连接,另一端绕过驱动齿轮与齿条连接,并在齿轮侧面形成抵接部。
17、在上述技术方案中,进一步的,还包括:
18、第二滑腔,第二滑腔开设在护臂本体内,且与第一滑腔连通并平行设置;
19、其中,第二滑腔与保持架相适配。
20、在上述技术方案中,进一步的,还包括:
21、拨动装置,拨动装置安装在护臂本体内,且与支撑部靠近护臂本体的一端相对应设置,并用于拨动支撑部转动。
22、在上述技术方案中,进一步的,拨动装置包括:
23、安装腔,安装腔开设在护臂本体内,且一侧贯穿护臂本体表面,并与支撑部靠近护臂本体的一端相对应设置;
24、主动辊,主动辊安装在护臂本体内;
25、从动辊,从动辊为两个,并均安装在护臂本体内;
26、皮带,皮带套设在两个从动辊和主动辊上;
27、联动装置,联动装置一端与主动辊连接,另一端与驱动齿轮连接;
28、其中,两个从动辊之间的皮带延伸出安装腔,并与护臂本体表面平行设置。
29、在上述技术方案中,进一步的,联动装置包括:
30、连接腔,连接腔开设在护臂本体内,且分别于第一滑腔与安装腔连通;
31、联动齿轮,联动齿轮同轴设在主动辊上;
32、联动皮带,联动皮带安装在连接腔内,且两端分别套设在驱动齿轮与联动齿轮上,并分别于驱动齿轮以及联动齿轮啮合。
33、本实用新型的有益效果为:
34、1.通过在护臂本体上设置伸缩部,在待护理人坐上马桶时,可以缩进,提高便捷性,并在待护理人坐上马桶后,扶手恢复,提高其如厕的安全性,而护臂本体后侧弯曲形成靠背部,可以提高待护理人如厕时的舒适度和安全性,防止器后仰发生危险;且结构简单,实用效果好;
35、2.通过将伸缩部的伸缩与支撑部的转动进行联动,有效提高对护臂调节时的高效性,具体的,伸缩部在驱动装置的作用下向护臂本体一侧收缩时,拨动装置会对支撑部一端进行拨动,从而减少支撑部与护臂本体表面的夹角角度,进而使得伸缩部在收缩的过程中,依靠护臂本体表面的抵接,使得支撑部抵消扭簧的作用力,从而发生转动,直至支撑部与护臂本体表面平行并紧贴,伸缩部收缩完毕,反之同理,随着伸缩部伸出,支撑部在扭簧的作用下复位。
技术特征:
1.一种智能护理机器人的护臂调节组件,其特征在于,包括:
2.根据权利要求1所述的智能护理机器人的护臂调节组件,其特征在于,还包括:
3.根据权利要求2所述的智能护理机器人的护臂调节组件,其特征在于,所述驱动装置包括:
4.根据权利要求3所述的智能护理机器人的护臂调节组件,其特征在于,所述驱动装置还包括:
5.根据权利要求4所述的智能护理机器人的护臂调节组件,其特征在于,还包括:
6.根据权利要求3所述的智能护理机器人的护臂调节组件,其特征在于,还包括:
7.根据权利要求6所述的智能护理机器人的护臂调节组件,其特征在于,所述拨动装置包括:
8.根据权利要求7所述的智能护理机器人的护臂调节组件,其特征在于,所述联动装置包括:
技术总结
本技术属于护理设备技术领域,尤其涉及一种智能护理机器人的护臂调节组件,包括壳体、护臂本体以及伸缩部,壳体上安装有护理机器人,底部安装有用于移动的移动装置,护臂本体安装在壳体两侧面,并在壳体后侧弯曲形成靠背部,伸缩部安装在护臂本体前侧;壳体内安装有驱动装置,其延伸至护臂本体内用于驱动伸缩部伸出和缩进;通过在护臂本体上设置伸缩部,在待护理人坐上马桶时,可以缩进,提高便捷性,并在待护理人坐上马桶后,扶手恢复,提高其如厕的安全性,而护臂本体后侧弯曲形成靠背部,可以提高待护理人如厕时的舒适度和安全性,防止器后仰发生危险;且结构简单,实用效果好。
技术研发人员:陈日春
受保护的技术使用者:浙江强鹰科技股份有限公司
技术研发日:20230724
技术公布日:2024/3/12
- 还没有人留言评论。精彩留言会获得点赞!