一种旋转摆臂及清洁机器人的制作方法
本技术涉及清洁设备,尤其是涉及一种旋转摆臂及清洁机器人。
背景技术:
1、随着自动化技术和人工智能的发展,智能机器人的需求越来越广泛。清洁机器人能够对地面进行清洁,适用于各种室内室外环境,例如道路、公园、宾馆、车站等。
2、现有的清洁机器人一般是通过电机带动机身前部的刷盘转动,对地面进行清洁,刷盘罩设有刷盘罩壳进行防护,在刷盘旋转的同时有清水和清洁剂从刷盘处流出,这样边洗边刷,再通过吸水耙吸取刷盘清洁后残留的污水。而清洁剂为了发挥更好的清洁效果,在清洁的时候才与清水箱里的清水进行配备,因此清洁剂往往容纳于单独的箱子内,并且为了不占用清水箱的安装空间,可以将清洁剂箱集成在刷盘的刷盘罩壳上。
3、但是,由于清洁机器人的刷盘罩壳安装在洗地总成支架上,且位于车架前侧的下方,刷盘罩壳上的清洁剂箱与车架之间的间隙较小,导致清洁剂箱加药困难,用户使用体验较差。
技术实现思路
1、本实用新型的目的在于提供一种旋转摆臂及清洁机器人,以解决刷盘罩壳上的清洁剂箱与车架之间的间隙较小,导致清洁剂箱加药困难,用户使用体验较差的技术问题。
2、本实用新型提供的一种旋转摆臂,用于转动连接在清洁机器人的加药盒上,且所述加药盒集成在所述清洁机器人的刷盘罩壳上,所述加药盒上设置有进药口,所述旋转摆臂包括:臂体和盖体;
3、所述臂体上设置有加药口和用于与所述进药口连通的出药口,所述臂体内设置有加药通道,所述加药口与所述出药口通过所述加药通道连通;
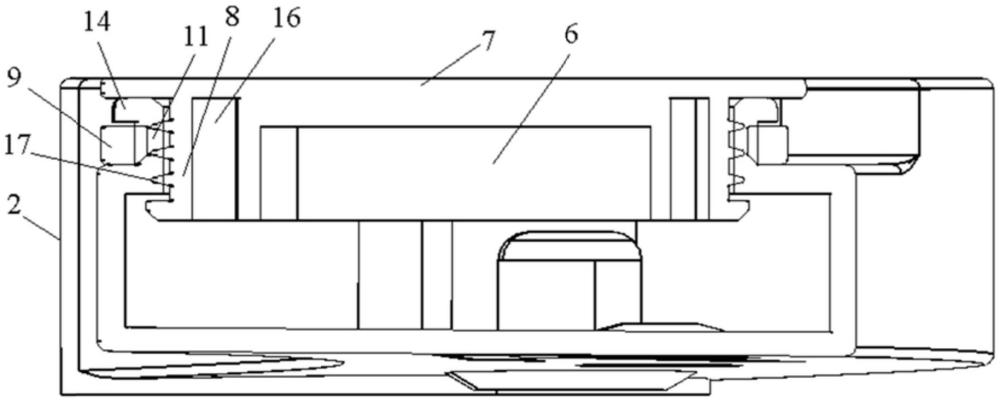
4、所述盖体包括盖顶和位于所述盖顶外缘内侧的盖壁,所述加药口处设置有外翻边,所述盖顶盖设于所述外翻边,所述盖壁位于所述外翻边内,且通过密封结构与所述外翻边的内侧壁密封连接。
5、作为一种进一步的技术方案,所述密封结构包括至少一个密封环筋,且所述密封环筋一体成型于所述盖壁的外侧壁上。
6、作为一种进一步的技术方案,还包括连接部,所述盖顶通过所述连接部连接于所述臂体。
7、作为一种进一步的技术方案,所述连接部包括连接带和连接环,所述连接环套设于所述外翻边,且所述连接带的一端连接于所述盖顶,另一端连接于所述连接环。
8、作为一种进一步的技术方案,所述外翻边的外侧壁设置有环槽,所述连接环位于所述环槽内。
9、作为一种进一步的技术方案,所述外翻边的外侧壁设置有环形凸起部,所述环形凸起部与所述外翻边和所述臂体之间形成所述环槽。
10、作为一种进一步的技术方案,沿所述盖壁的周向,所述盖壁背离所述盖顶的一端开设有至少一个缓冲槽。
11、作为一种进一步的技术方案,所述臂体具有相对的第一侧面和第二侧面;
12、所述第一侧面设置有凹陷部,所述加药口位于所述凹陷部内,且所述盖顶与所述第一侧面平齐或低于所述第一侧面;
13、所述第二侧面设置有所述出药口,且所述加药口和所述出药口分别位于所述臂体相对的两端。
14、作为一种进一步的技术方案,所述臂体上设置有用于转动连接在所述加药盒上的安装部,且所述安装部位于所述出药口处。
15、本实用新型提供的一种清洁机器人,包括所述的旋转摆臂。
16、与现有技术相比,本实用新型提供的一种旋转摆臂及清洁机器人所具有的技术优势为:
17、本实用新型提供的旋转摆臂,用于转动连接在清洁机器人的加药盒上,且加药盒集成在清洁机器人的刷盘罩壳上,加药盒上设置有进药口,旋转摆臂包括:臂体和盖体;臂体上设置有加药口和用于与进药口连通的出药口,臂体内设置有加药通道,加药口与出药口通过加药通道连通;盖体包括盖顶和位于盖顶外缘内侧的盖壁,加药口处设置有外翻边,盖顶盖设于外翻边,盖壁位于外翻边内,且通过密封结构与外翻边的内侧壁密封连接。
18、将加药盒集成在刷盘罩壳上,不占用清洁机器人清水箱的安装空间,提高空间利用率,将旋转摆臂转动安装在加药盒上,当需要向加药盒内加药时,只需转动旋转摆臂,使旋转摆臂上的加药口在刷盘罩壳的侧方伸出,打开盖体即可向加药口内加药,药剂依次通过加药通道、出药口和进药口进入到加药盒内,加药方便,提升用户使用体验,同时当盖顶盖在加药口上时,盖壁位于外翻边内,且通过密封结构与外翻边的内侧壁密封连接,避免加药口处漏液。
19、本实用新型提供的清洁机器人,包括上述旋转摆臂,由此,其所达到的技术优势及效果包括上述旋转摆臂所达到的技术优势及效果,此处不做详细阐述。
20、本实用新型的其他特征和优点将在随后的具体实施方式部分予以详细说明。
技术特征:
1.一种旋转摆臂,用于转动连接在清洁机器人的加药盒(1)上,且所述加药盒(1)集成在所述清洁机器人的刷盘罩壳(23)上,所述加药盒(1)上设置有进药口,其特征在于,所述旋转摆臂包括:臂体(2)和盖体(3);
2.根据权利要求1所述的旋转摆臂,其特征在于,所述密封结构包括至少一个密封环筋(17),且所述密封环筋(17)一体成型于所述盖壁(8)的外侧壁上。
3.根据权利要求1所述的旋转摆臂,其特征在于,还包括连接部,所述盖顶(7)通过所述连接部连接于所述臂体(2)。
4.根据权利要求3所述的旋转摆臂,其特征在于,所述连接部包括连接带(12)和连接环(9),所述连接环(9)套设于所述外翻边(11),且所述连接带(12)的一端连接于所述盖顶(7),另一端连接于所述连接环(9)。
5.根据权利要求4所述的旋转摆臂,其特征在于,所述外翻边(11)的外侧壁设置有环槽(15),所述连接环(9)位于所述环槽(15)内。
6.根据权利要求5所述的旋转摆臂,其特征在于,所述外翻边(11)的外侧壁设置有环形凸起部(14),所述环形凸起部(14)与所述外翻边(11)和所述臂体(2)之间形成所述环槽(15)。
7.根据权利要求1-6任意一项所述的旋转摆臂,其特征在于,沿所述盖壁(8)的周向,所述盖壁(8)背离所述盖顶(7)的一端开设有至少一个缓冲槽(16)。
8.根据权利要求1-6任意一项所述的旋转摆臂,其特征在于,所述臂体(2)具有相对的第一侧面(18)和第二侧面(19);
9.根据权利要求1-6任意一项所述的旋转摆臂,其特征在于,所述臂体(2)上设置有用于转动连接在所述加药盒(1)上的安装部,且所述安装部位于所述出药口(5)处。
10.一种清洁机器人,其特征在于,包括权利要求1-9任意一项所述的旋转摆臂。
技术总结
本技术涉及清洁设备技术领域,尤其是涉及一种旋转摆臂及清洁机器人。本技术提供的旋转摆臂,用于转动连接在清洁机器人的加药盒上,且加药盒集成在清洁机器人的刷盘罩壳上,加药盒上设置有进药口,旋转摆臂包括:臂体和盖体;臂体上设置有加药口和用于与进药口连通的出药口,臂体内设置有加药通道,加药口与出药口通过加药通道连通;盖体包括盖顶和位于盖顶外缘内侧的盖壁,加药口处设置有外翻边,盖顶盖设于外翻边,盖壁位于外翻边内,且通过密封结构与外翻边的内侧壁密封连接。转动旋转摆臂,使旋转摆臂上的加药口在刷盘罩壳的侧方伸出即可加药,加药方便,盖壁通过密封结构与外翻边的内侧壁密封连接,避免加药口处漏液。
技术研发人员:李振,王高祥,陈召,乐毅
受保护的技术使用者:苏州高之仙自动化科技有限公司
技术研发日:20230831
技术公布日:2024/4/24
- 还没有人留言评论。精彩留言会获得点赞!