一种带有超声波传感器的清洁机器人的制作方法
本技术涉及到清洁机器人,特别涉及到一种带有超声波传感器的清洁机器人。
背景技术:
1、近年来,随着计算机技术与人工智能科学的飞速发展,智能机器人技术逐渐成为现代机器人研究领域的热点。其中,扫地机器人作为智能机器人中最实用化的一种,能凭借一定的人工智能,自动完成地面的清理工作。扫地机器人的发展方向,将是更加高级的人工智能带来的更好的清扫效果、更高的清扫效率、更大的清扫面积。
2、相关技术中,清洁机器人通常只安装线性雷达或激光雷达来辅助清扫工作,但线性雷达及激光雷达并不能检测到清扫过程中的玻璃,当进行清扫工作时,机器人通常因无法检测到玻璃而发生碰撞,为了弥补这一缺陷,在清洁机器人前侧增设了超声波传感器,以此检测行进方向上可能出现的玻璃等障碍物,然而,由于仅在前侧设置了超声波传感器,在机器人转弯或者旋转时存在盲区,不能全方位探测到机器人左右两侧和其他方位的玻璃或者障碍物,导致清洁机器人盲目撞击障碍物,不能进行避障的情况,进而影响清洁工作的正常进行,影响清洁效率。
技术实现思路
1、本实用新型的主要目的为提供一种带有超声波传感器的清洁机器人,旨在解决因不能全方位探测设备透明物体等周围信息而发生碰撞及清洁效率低的问题。
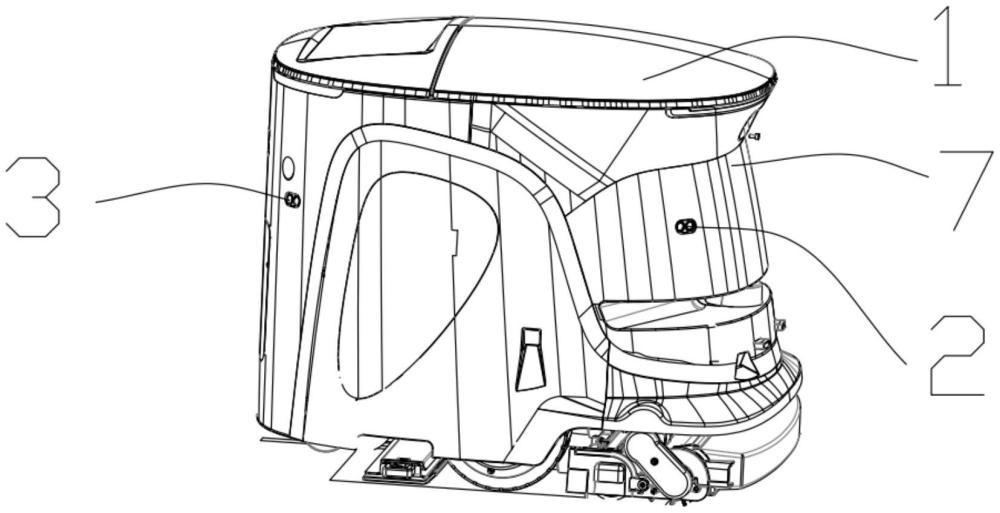
2、为了实现上述实用新型目的,本实用新型第一方面提出一种带有超声波传感器的清洁机器人,包括机器人主体,还包括两组前侧超声波传感器和两组后侧超声波传感器,所述两组前侧超声波传感器设于所述机器人主体前侧且沿所述机器人主体中轴线对称设置,所述两组后侧超声波传感器设于所述机器人主体后侧且沿所述机器人主体中轴线对称设置;
3、进一步地,所述两组前侧超声波传感器基于所述机器人主体的前端面向两侧斜45度发射超声波信号;
4、进一步地,所述两组后侧超声波传感器基于所述机器人主体的后端面斜45度向两侧发射超声波信号;
5、进一步地,所述机器人主体的前端面与侧边形成有弧面,所述两组前侧超声波传感器安装在所述弧面上;
6、进一步地,所述前侧超声波传感器和所述后侧超声波传感器均包括发射接收端和安装端,所述发射接收端与所述安装端连接,所述安装端与所述机器人主体固定连接;
7、进一步地,所述安装端上设有安装孔,所述安装端通过所述安装孔与所述机器人主体螺栓连接;
8、进一步地,所述机器人主体开设有多组容纳槽,所述前侧超声波传感器和所述后侧超声波传感器分别设于对应的所述容纳槽内;
9、进一步地,所述前侧超声波传感器和后侧超声波传感器均设置有连接杆,所述连接杆与所述机器人主体固定连接。
10、有益效果:
11、本实用新型的带有超声波传感器的清洁机器人,包括机器人主体,还包括两组前侧超声波传感器和两组后侧超声波传感器,所述两组前侧超声波传感器设于所述机器人主体前侧且沿所述机器人主体中轴线对称设置,所述两组后侧超声波传感器设于所述机器人主体后侧且沿所述机器人主体中轴线对称设置,其中,设置在机器人主体后端的后侧超声波传感器检测清洁机器人后方的位置信息情况,有无玻璃或障碍物的存在对机器人的后退造成阻碍,设置在机器人主体前端的前侧超声波传感器对前端的玻璃或障碍物进行检测,前侧超声波传感器和后侧超声波传感器设置的目的是在清洁机器人工作过程中对其周围的位置进行检测识别,用于检测周围环境中是否存在障碍物,并进一步确定清洁机器人的行动,清洁机器人需要全方位感知周围环境,以便避开障碍物、家具或其他不可越过的区域,帮助机器人做出适应性移动和路径规划决策。因此,在清洁机器人周向方向上设置前侧超声波传感器和后侧超声波传感器有助于提供全方位的距离测量和障碍物检测,并与其他发射器协同工作,提高机器人的环境感知及导航能力。
技术特征:
1.一种带有超声波传感器的清洁机器人,包括机器人主体;其特征在于,还包括两组前侧超声波传感器和两组后侧超声波传感器,所述两组前侧超声波传感器设于所述机器人主体前侧且沿所述机器人主体中轴线对称设置,所述两组后侧超声波传感器设于所述机器人主体后侧且沿所述机器人主体中轴线对称设置。
2.根据权利要求1所述的带有超声波传感器的清洁机器人,其特征在于,所述两组前侧超声波传感器基于所述机器人主体前端面向两侧斜45度发射超声波信号。
3.根据权利要求1所述的带有超声波传感器的清洁机器人,其特征在于,所述两组后侧超声波传感器基于所述机器人主体后端面斜45度向两侧发射超声波信号。
4.根据权利要求1所述的带有超声波传感器的清洁机器人,其特征在于,所述机器人主体的前端面与侧边形成有弧面,所述两组前侧超声波传感器安装在所述弧面上。
5.根据权利要求1所述的带有超声波传感器的清洁机器人,其特征在于,所述前侧超声波传感器和所述后侧超声波传感器均包括发射接收端和安装端,所述发射接收端与所述安装端连接,所述安装端与所述机器人主体固定连接。
6.根据权利要求5所述的带有超声波传感器的清洁机器人,其特征在于,所述安装端上设有安装孔,所述安装端通过所述安装孔与所述机器人主体螺栓连接。
7.根据权利要求1所述的带有超声波传感器的清洁机器人,其特征在于,所述机器人主体开设有多组容纳槽,所述前侧超声波传感器和所述后侧超声波传感器分别设于对应的所述容纳槽内。
8.根据权利要求1所述的带有超声波传感器的清洁机器人,其特征在于,所述前侧超声波传感器和后侧超声波传感器均设置有连接杆,所述连接杆与所述机器人主体固定连接。
技术总结
本技术属于清洁机器人技术领域,公开了一种带有超声波传感器的清洁机器人,其中,包括机器人主体,还包括两组前侧超声波传感器和两组后侧超声波传感器,两组前侧超声波传感器设于机器人主体前侧且沿机器人主体中轴线对称设置,两组后侧超声波传感器设于机器人主体后侧且沿机器人主体中轴线对称设置,在清洁机器人周向方向上设置前侧超声波传感器和后侧超声波传感器有助于提供全方位的距离测量和障碍物检测,并与其他发射器协同工作,提高机器人的环境感知及导航能力。
技术研发人员:周沛建,王雪松
受保护的技术使用者:奇勃(深圳)科技有限公司
技术研发日:20231101
技术公布日:2024/7/15
- 还没有人留言评论。精彩留言会获得点赞!