远程控制装置及远程扫地机器人的制作方法
本技术属于扫地机器人,涉及远程控制装置及远程扫地机器人。
背景技术:
1、扫地机器人在社会生活中应用十分广泛,对于在较大的场所进行清理工作时,需要将扫地机器人通过物联网与智能终端相连,从而达到远程控制的目的,使扫地机器人通过物联网远程操控自动完成地板清理工作。
2、在中国专利cn214906431u中公开的一种基于物联网的写字楼扫地机器人,该扫地机器人,通过设计的安装座与安装孔便于边刷的安装,同时通过设计的限位板、橡胶卡块和固定卡槽便于固定安装座,操作简单快捷。
3、但是,该扫地机器人,在安装时,首先将安装座的顶端面与安装槽的开口处对齐,与此同时将安装孔的顶部开口处与转动轴的底端面对齐,接着推动安装座向安装槽的内部运动,直至安装座与安装槽完全卡合,同时转动轴与安装孔完全卡合,然后将限位板顶部的橡胶卡块向固定卡槽的内部推动,此时橡胶卡块会带动限位柱做同方向的运动,直至固定卡槽与橡胶卡块卡合,同时限位柱与限位槽卡合,这时限位板的顶端面会与放置槽的表面贴合连接,使得在安装时,需要先将安装座移动至机器人主体上,之后再使用橡胶卡块对安装座固定,操作较为复杂,使用不便。
4、为解决上述问题,本实用新型提出了远程控制装置及远程扫地机器人。
技术实现思路
1、为解决背景技术中存在的问题,本实用新型提出了远程控制装置及远程扫地机器人。
2、为了实现上述目的,本实用新型采用的技术方案如下:包括主体,所述主体前端底部的两边均固定连接有边刷,两个边刷内部的两端均开设有安装槽,所述安装槽的内部通过动力设备转动连接有转轴,所述转轴的内部开设有移动槽,所述移动槽的内部通过弹簧滑动连接有连接柱,所述连接柱的底端穿过转轴且固定连接有固定圆板,固定圆板位于转轴的下方且与转轴的外表面直径相等;
3、所述固定圆板的底部固定连接有两个固定板,两个固定板之间转动连接有翻转板,翻转板两侧与固定板的铰接处设置有扭簧;
4、所述转轴的底端滑动套接有安装座,所述安装座的中部上下贯穿开设有滑动槽和第一凹槽,滑动槽与固定圆板的直径相等,第一凹槽的形状与翻转板相适配;
5、所述安装座底部的圆周边上固定连接有若干毛刷,所述主体的底部设置有万向轮和驱动轮。
6、进一步地,所述动力设备包括电机,所述电机固定连接于边刷的内部,电机位于安装槽的上方,转轴与电机的输出轴固定连接。
7、进一步地,所述弹簧固定连接于移动槽的内壁顶端与连接柱的顶部之间,所述移动槽的圆周内壁上均匀开设有两个限位槽,所述连接柱的外表面固定连接有两个限位块,两个限位块分别滑动连接于两个限位槽的内部。
8、进一步地,所述边刷为倾斜设置,万向轮位于两个边刷之间,所述驱动轮设置有两个,两个驱动轮分别位于主体后端的两侧,所述主体后端的底部设置有尘推,尘推位于驱动轮的后方,所述主体顶端的内部设置有垃圾箱,所述主体上设置有扶手和防撞触边。
9、远程控制装置,用于控制如上述的远程扫地机器人,包括操作面板,所述操作面板固定连接于主体的顶部,主体顶部位于操作面板的两侧对称设置有开关按钮和急停按钮。
10、进一步地,所述主体的一侧从上至下依次设置有装饰灯、双目摄像头、超声波传感器、激光雷达和充电触点,装饰灯、双目摄像头、超声波传感器、激光雷达和充电触点均与操作面板电性连接。
11、与现有技术相比,本实用新型具有以下有益效果:
12、1.该远程控制装置及远程扫地机器人,通过设置安装座,在安装座底部的圆周面上固定连接有若干毛刷,在对安装座安装时,首先向下90度转动翻转板,使翻转板为垂直状态,此时手抵在翻转板的上端,限制翻转板的转动,之后另一只手拿起安装座,使安装座从翻转板的底端穿过,此时抵着翻转板的手松开,即可继续向上滑动安装座,直至固定圆板的底面与滑动槽的内壁接触,使得翻转板由于扭簧的旋转力完全转动至第一凹槽内,此时对安装座进行固定,完成安装,而在拆卸时,直接向下拉动安装座,推动翻转板向下转动,即可将安装座移出,能够直接对安装座进行拆卸,结构简单,便于操作。
13、2.该远程控制装置及远程扫地机器人,通过设置连接柱,连接柱的顶部与移动槽的内壁顶端固定连接有弹簧,在将安装座固定在转轴上之后进行扫地时,如果遇到不平的地面,毛刷会通过安装座向上推动固定圆板,使连接柱挤压弹簧,进而使连接柱在移动槽内上下滑动,进而使毛刷能够与地面始终接触,使用效果好。
技术特征:
1.远程扫地机器人,其特征在于,包括主体(1),所述主体(1)前端底部的两边均固定连接有边刷(11),两个边刷(11)内部的两端均开设有安装槽(21),所述安装槽(21)的内部通过动力设备转动连接有转轴(20),所述转轴(20)的内部开设有移动槽(23),所述移动槽(23)的内部通过弹簧(26)滑动连接有连接柱(22),所述连接柱(22)的底端穿过转轴(20)且固定连接有固定圆板(25),固定圆板(25)位于转轴(20)的下方且与转轴(20)的外表面直径相等;
2.根据权利要求1所述的远程扫地机器人,其特征在于:所述动力设备包括电机(19),所述电机(19)固定连接于边刷(11)的内部,电机(19)位于安装槽(21)的上方,转轴(20)与电机(19)的输出轴固定连接。
3.根据权利要求1所述的远程扫地机器人,其特征在于:所述弹簧(26)固定连接于移动槽(23)的内壁顶端与连接柱(22)的顶部之间,所述移动槽(23)的圆周内壁上均匀开设有两个限位槽(30),所述连接柱(22)的外表面固定连接有两个限位块(27),两个限位块(27)分别滑动连接于两个限位槽(30)的内部。
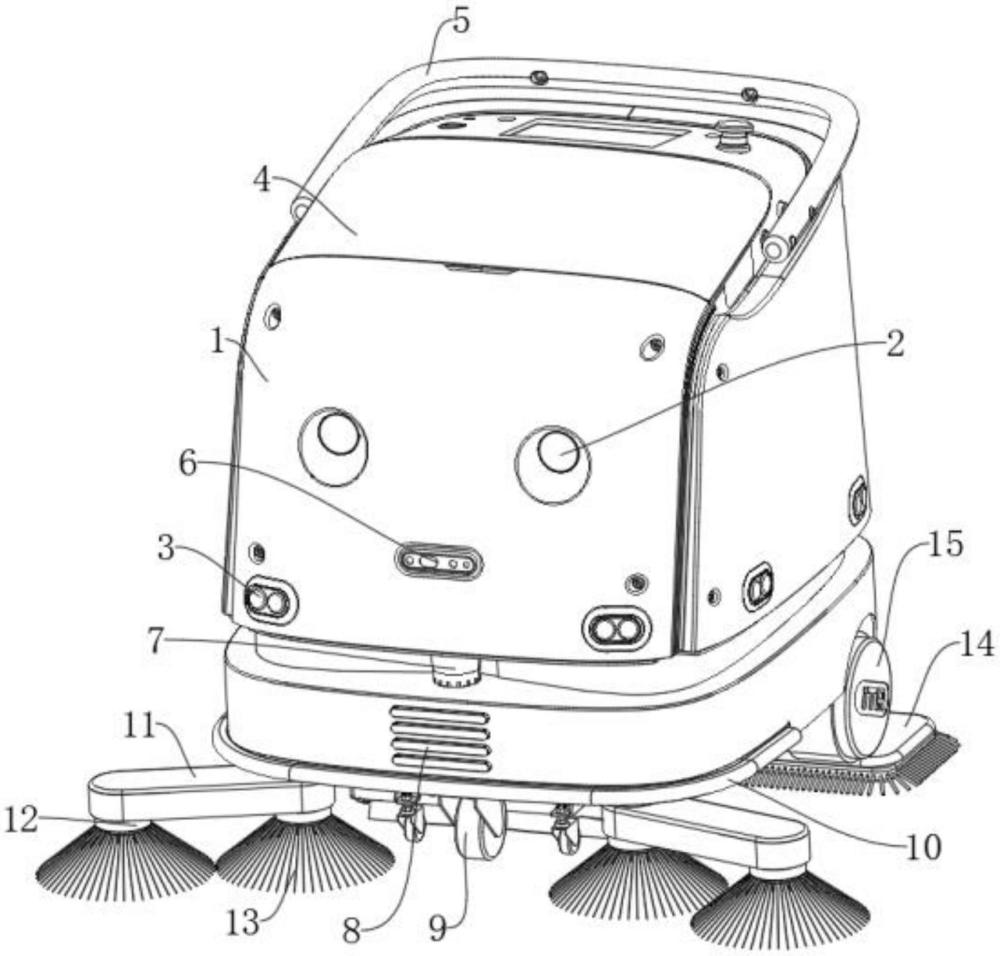
4.根据权利要求1所述的远程扫地机器人,其特征在于:所述边刷(11)为倾斜设置,万向轮(9)位于两个边刷(11)之间,所述驱动轮(15)设置有两个,两个驱动轮(15)分别位于主体(1)后端的两侧,所述主体(1)后端的底部设置有尘推(14),尘推(14)位于驱动轮(15)的后方,所述主体(1)顶端的内部设置有垃圾箱(4),所述主体(1)上设置有扶手(5)和防撞触边(10)。
5.远程控制装置,其特征在于:用于控制如权利要求1-4任一项所述的远程扫地机器人,所述远程控制装置包括操作面板(17),所述操作面板(17)固定连接于主体(1)的顶部,主体(1)顶部位于操作面板(17)的两侧对称设置有开关按钮(16)和急停按钮(18)。
6.根据权利要求5所述的远程控制装置,其特征在于:所述主体(1)的一侧从上至下依次设置有装饰灯(2)、双目摄像头(6)、超声波传感器(3)、激光雷达(7)和充电触点(8),装饰灯(2)、双目摄像头(6)、超声波传感器(3)、激光雷达(7)和充电触点(8)均与操作面板(17)电性连接。
技术总结
本技术属于扫地机器人技术领域,涉及远程控制装置及远程扫地机器人,包括包括主体,所述主体前端底部的两边均固定连接有边刷,两个边刷内部的两端均开设有安装槽,所述安装槽的内部通过动力设备转动连接有转轴,转轴的内部开设有移动槽,移动槽的内部通过弹簧滑动连接有连接柱,连接柱的底部固定连接有固定圆板,所述固定圆板的底部通过两个固定板转动连接有翻转板,翻转板两侧与固定板的铰接处设置有扭簧,所述转轴的底端滑动套接有安装座,所述安装座的中部上下贯穿开设有滑动槽和第一凹槽。本技术的优点在于:通过翻转板转动能够移动安装座,将安装座卡在转轴的底端,拆卸时直接向下拉动安装座即可,结构简单,便于操作。
技术研发人员:刘刚,潘鑫,张毅,马也
受保护的技术使用者:四川它人科技有限公司
技术研发日:20231106
技术公布日:2024/7/11
- 还没有人留言评论。精彩留言会获得点赞!