一种轮式扫地机器人的制作方法
本技术属于扫地机器人,涉及一种轮式扫地机器人。
背景技术:
1、扫地机器人基本功能为清扫、吸尘、拖地,而扫地机器人基本功能的不断优化实现了更好的清洁效果和用户体验。扫地机器人在不断改善清洁效果的同时,作为智能化程度最高的清洁类产品,在当今的家电产品向“智能家居”转型的大浪潮中,扫地机器人智能功能的发展也获得了更加广阔的空间。
2、在公告号为“cn219814011u”的中国专利文件中公开了扫地机器人,采用的技术方案是:包括机器人本体,机器人本体底部安装有第一清洁刷,机器人本体顶部固定安装有探测雷达,机器人本体顶部固定安装有保护壳,机器人本体顶部固定安装有双轴电机,双轴电机顶部输出端固定安装有安装盘,安装盘内部周向等距开设有多个安装槽,安装槽内部均滑动连接有移动杆,移动杆另一端贯穿且延伸至安装槽外部,安装环一端固定连接有第二清洁刷,双轴电机与两个第二清洁刷之间设有传动组件。双轴电机通过传动组件带动安装环以及第二清洁刷向下移动,从而使第二清洁刷能够清洁探测雷达的外壁,保证雷达后续工作的质量。
3、但该方案仍存在以下缺点:双轴电机在运行时,第二清洁刷无法复位,当使用过程中探测雷达再次被灰尘覆盖,需要清理灰尘时,只能关闭双轴电机使第二清洁刷复位,然后再次启动双轴电机带动第二清洁刷,影响机器人的工作效率。
4、为解决上述问题,本实用新型提出了一种轮式扫地机器人。
技术实现思路
1、为解决背景技术中存在的问题,本实用新型提出了一种轮式扫地机器人。
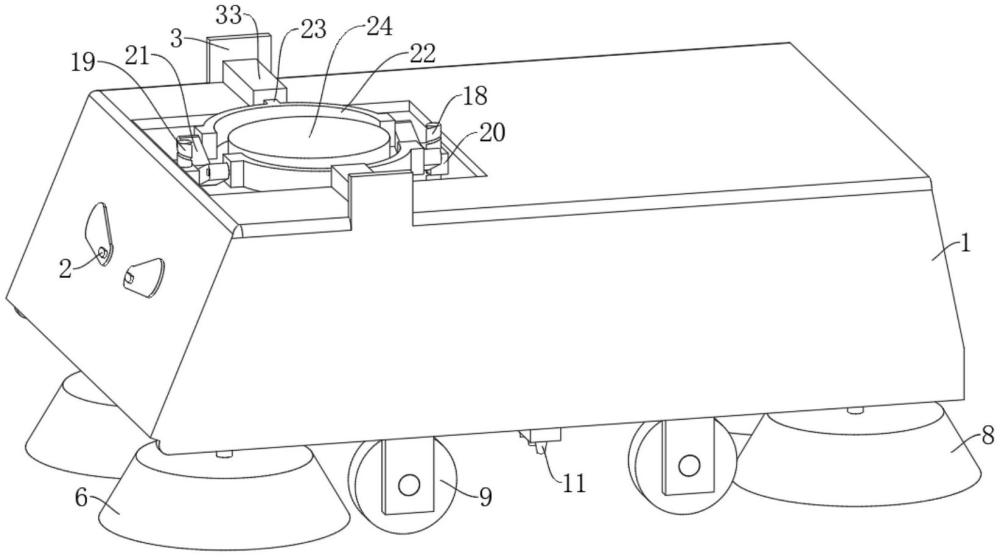
2、为了实现上述目的,本实用新型采用的技术方案如下:包括底板,所述底板上固定连接有外壳,所述外壳上端面的前侧开设有通槽,通槽的两侧均设有限位筒,且两个限位筒均固定连接在外壳的上端面,两个限位筒相互远离的一端均固定连接有挡板,两个挡板均固定连接在外壳上端面的两侧;所述通槽内设有两个半圆形清洁刷,两个半圆形清洁刷的外圆周中央均固定连接有滑杆,两个滑杆限位滑动连接在两个限位筒内。两个半圆形清洁刷的中间设有探测雷达,探测雷达的底面固定连接有转轴的上端,转轴的下端转动连接在底板上;所述底板上设有驱动探测雷达旋转且驱动两个半圆形清洁刷相互靠近的驱动组件,所述底板上还设有清扫组件、洒水组件、烘干组件。
3、进一步地,所述的驱动组件包括第三电机,第三电机的输出轴固定连接有第一螺纹杆,第一螺纹杆与滑块螺纹连接,滑块滑动连接在底板上,滑块的一侧固定连接有连接板,滑块的另一侧固定连接有第二齿条,所述转轴的下端固定套设有第二齿轮,第二齿轮与底板转动连接,第二齿轮与第二齿条相啮合;所述连接板的一侧固定连接有第一齿条,第一齿条与底板滑动连接;所述底板上转动连接有第二螺纹杆和第三螺纹杆,第二螺纹杆的底部同轴固连有第一齿轮,第一齿轮与第一齿条啮合,第二螺纹杆上同轴固连有第二带轮,第三螺纹杆上同轴固连有第一带轮,第一带轮和第二带轮上套设有第一皮带;第二螺纹杆和第三螺纹杆上端均螺纹连接有连接块,两个连接块朝向探测雷达的一侧均铰接有两个连杆,每个半圆形清洁刷的两端均固定连接有矩形块,矩形块与对应的连杆的一端铰接。
4、进一步地,所述清扫组件包括前置拖把和后置拖把,底板的底面前端两侧均安装有前置拖把,底板的底面后端两侧均安装有后置拖把;所述底板上固定安装有两个第一电机,第一电机与前置拖把一一对应,第一电机的电机轴穿过底板与相应的前置拖把驱动连接。所述底板上固定安装有两个第二电机,第二电机与后置拖把一一对应,第二电机的电机轴穿过底板与相应的后置拖把驱动连接。前置拖把先将地面进行第一步清扫,后置拖把进一步对地面进行清扫,并将灰尘粘着在后置拖把上,提高清扫效率。
5、进一步地,所述洒水组件包括水箱,水箱固定安装在底板的上端面中央,水箱与底板底部的一排喷头连通,喷头内均设有阀门。洒水组件可将清水喷洒到地面上,将顽固灰尘湿润,使其与地面的粘着性下降,方便后置拖把进一步清扫。
6、进一步地,所述烘干组件包括风扇,风扇的转动轴转动连接在底板的底面,风扇的转动轴上套设有第二皮带,第二皮带还套设有第三带轮,第三带轮固定套设在其中一个第二电机的电机轴上。风扇将空气吹向湿润的地面,使湿润的地面快速干燥,防止人经过时滑倒。
7、进一步地,所述底板的底部固定安装有四个车轮,其中一个车轮为电驱动轮。车轮为扫地机器人前进提供动力,也能改变扫地机器人的行驶方向。
8、进一步地,所述外壳的前端固定安装有两个传感器,传感器为速度传感器。
9、与现有技术相比,本实用新型具有以下有益效果:为防止探测雷达表面因长时间使用而沾上灰尘,设有两个半圆形清洁刷,半圆形清洁刷在第三电机的带动下相互靠近,为探测雷达清洁灰尘,同时,转轴可带动探测雷达旋转,使半圆形清洁刷更充分地清洁探测雷达。半圆形清洁刷由单独的动力组件驱动,在扫地机器人不停止工作的情况下,就可以对探测雷达进行清理。
技术特征:
1.一种轮式扫地机器人,其特征在于:包括底板(4),所述底板(4)上固定连接有外壳(1),所述外壳(1)上端面的前侧开设有通槽,通槽的两侧均设有限位筒(33),且两个限位筒(33)均固定连接在外壳(1)的上端面;所述通槽内设有两个半圆形清洁刷(22),两个半圆形清洁刷(22)的外圆周中央均固定连接有滑杆(23),两个滑杆(23)限位滑动连接在两个限位筒(33)内;两个半圆形清洁刷(22)的中间设有探测雷达(24),探测雷达(24)的底面固定连接有转轴(28)的上端,转轴(28)的下端转动连接在底板(4)上;所述底板(4)上设有驱动探测雷达(24)旋转且驱动两个半圆形清洁刷(22)相互靠近的驱动组件,所述底板(4)上还设有清扫组件、洒水组件、烘干组件。
2.根据权利要求1所述的一种轮式扫地机器人,其特征在于:所述的驱动组件包括第三电机(12),第三电机(12)的输出轴固定连接有第一螺纹杆(13),第一螺纹杆(13)与滑块(14)螺纹连接,滑块(14)滑动连接在底板(4)上,滑块(14)的一侧固定连接有连接板(34),滑块(14)的另一侧固定连接有第二齿条(16),所述转轴(28)的下端固定套设有第二齿轮(29),第二齿轮(29)与底板(4)转动连接,第二齿轮(29)与第二齿条(16)相啮合;所述连接板(34)的一侧固定连接有第一齿条(15),第一齿条(15)与底板(4)滑动连接;所述底板(4)上转动连接有第二螺纹杆(18)和第三螺纹杆(19),第二螺纹杆(18)的底部同轴固连有第一齿轮(17),第一齿轮(17)与第一齿条(15)啮合,第二螺纹杆(18)上同轴固连有第二带轮(27),第三螺纹杆(19)上同轴固连有第一带轮(25),第一带轮(25)和第二带轮(27)上套设有第一皮带(26);第二螺纹杆(18)和第三螺纹杆(19)上端均螺纹连接有连接块(20),两个连接块(20)朝向探测雷达(24)的一侧均铰接有两个连杆(21),每个半圆形清洁刷(22)的两端均固定连接有矩形块,矩形块与对应的连杆(21)的一端铰接。
3.根据权利要求1所述的一种轮式扫地机器人,其特征在于:所述清扫组件包括前置拖把(6)和后置拖把(8),底板(4)的底面前端两侧均安装有前置拖把(6),底板(4)的底面后端两侧均安装有后置拖把(8);所述底板(4)上固定安装有两个第一电机(5),第一电机(5)与前置拖把(6)一一对应,第一电机(5)的电机轴穿过底板(4)与相应的前置拖把(6)驱动连接;所述底板(4)上固定安装有两个第二电机(7),第二电机(7)与后置拖把(8)一一对应,第二电机(7)的电机轴穿过底板(4)与相应的后置拖把(8)驱动连接。
4.根据权利要求1所述的一种轮式扫地机器人,其特征在于:所述洒水组件包括水箱(10),水箱(10)固定安装在底板(4)的上端面中央,水箱(10)与底板(4)底部的一排喷头(11)连通,喷头(11)内均设有阀门。
5.根据权利要求1所述的一种轮式扫地机器人,其特征在于:所述烘干组件包括风扇(32),风扇(32)的转动轴转动连接在底板(4)的底面,风扇(32)的转动轴上套设有第二皮带(31),第二皮带(31)还套设有第三带轮(30),第三带轮(30)固定套设在其中一个第二电机(7)的电机轴上。
6.根据权利要求1所述的一种轮式扫地机器人,其特征在于:所述底板(4)的底部固定安装有四个车轮(9),其中一个车轮(9)为电驱动轮。
7.根据权利要求1所述的一种轮式扫地机器人,其特征在于:所述外壳(1)的前端固定安装有两个传感器(2),传感器(2)为速度传感器。
技术总结
本技术公开了一种轮式扫地机器人,包括底板,所述底板上固定连接有外壳,所述外壳上端面的前侧开设有通槽,通槽内设有两个半圆形清洁刷,两个半圆形清洁刷的中间设有探测雷达,探测雷达的底面固定连接有转轴的上端,转轴的下端转动连接在底板上;所述底板上设有驱动探测雷达旋转且驱动两个半圆形清洁刷相互靠近的驱动组件,所述底板上还设有清扫组件、洒水组件、烘干组件。该方案的有益效果为:半圆形清洁刷由单独的动力组件驱动,在扫地机器人不停止工作的情况下,就可以对探测雷达进行清理。
技术研发人员:潘鑫,马也,刘刚,张毅
受保护的技术使用者:四川它人科技有限公司
技术研发日:20231129
技术公布日:2024/7/15
- 还没有人留言评论。精彩留言会获得点赞!