一种具有定位功能的擦窗机器人的制作方法
本技术涉及清洁类小家电,特别是涉及一种具有定位功能的擦窗机器人。
背景技术:
1、随着家用小家电市场的繁荣,越来越多的家用小家电走进了大众的家中。根据不同的使用需要,又被开发出不同的功能。其中,擦窗机器人是智能家用电器的一种。它能通过自身内置的真空泵或者风机装置抽真空后产生的负压而牢牢地吸附在玻璃上,并自动探测窗户的边角距离、规划擦窗路径。擦窗机器人一般会利用自身吸附在玻璃上的力度来带动机身底部的抹布擦掉玻璃上的脏污。
2、现有的专利申请号为cn202221033204.1的实用新型公开了一种具有机体定位功能的表面清洁设备,包括行走机构、本体、感应触点和传感器。其中,传感器设在本体内。感应触点设在本体的四周端点。行走机构设在本体的底部。行走机构、感应触点和传感器电性连接;
3、该装置能够在擦窗机器人放置在窗户任一位置时,能够自动运动到最顶端,进行清洁,但是仍然具有以下缺陷:该装置底部安装的清洁棉在使用时无法自动更换,而普通窗户的脏污程度一般仅使用一块清洁棉无法完全擦拭干净,因此在擦拭窗户的过程中需要将装置收回并手动更换清洁棉后再继续对窗户进行清洁作业,十分不便。
技术实现思路
1、为了克服现有技术的不足,本实用新型提供一种具有定位功能的擦窗机器人,通过设置清洁腔和第一清洁棉以及第二清洁棉,在使用本装置时可以首先使用第一清洁棉,过程中可以通过伸缩杆带动第一清洁棉回到清洁腔并伸出第二清洁棉,方便自动对清洁棉进行更换清洁,无需在擦拭窗户的过程中将装置收回并更换清洁棉。
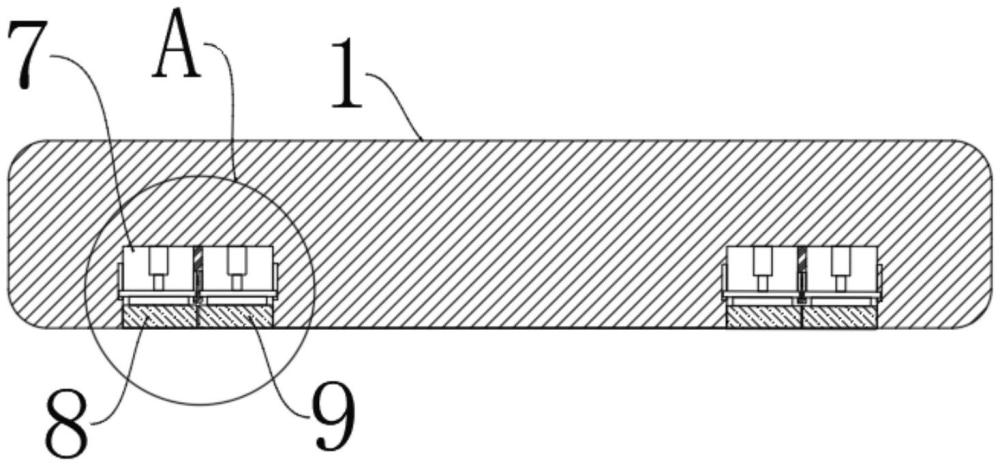
2、为解决上述技术问题,本实用新型提供如下技术方案:一种具有定位功能的擦窗机器人,包括擦窗机器人本体,所述擦窗机器人本体的下方设有感应触点和行走机构,所述擦窗机器人本体的底部向内开设有清洁腔,所述清洁腔位于行走机构的外侧,所述清洁腔内部设有第一清洁棉和第二清洁棉,所述第一清洁棉和第二清洁棉的上方均连接有伸缩杆,所述伸缩杆设有多组且固定在清洁腔内部。
3、作为本实用新型的一种优选技术方案,所述第一清洁棉套设在第二清洁棉的外侧,所述第一清洁棉和第二清洁棉上位于清洁腔内部的一端均固定有安装块,所述伸缩杆的一端固定在清洁腔内壁面上,所述伸缩杆的另一端固定连接有活动板,所述活动板与安装块之间卡接。
4、作为本实用新型的一种优选技术方案,所述清洁腔内部位于两组所述活动板之间设有固定块,所述固定块的上端与清洁腔的内壁之间固定连接,所述固定块的两侧均开设有第二滑槽,所述清洁腔内部两侧均开设有第一滑槽,所述活动板的两侧分别位于第二滑槽与第一滑槽内部滑动。
5、作为本实用新型的一种优选技术方案,所述活动板的下方向内开设有安装槽,所述安装块的上端伸入安装槽内部,所述安装块上方的两侧均固定有卡块,所述安装槽内部两侧均开设有固定槽,两组所述卡块分别位于两组固定槽内并与其卡合连接,所述卡块为丁腈橡胶材质。
6、作为本实用新型的一种优选技术方案,所述感应触点设有四组且均匀分布在擦窗机器人本体下方的四周,所述第一清洁棉和第二清洁棉均位于感应触点的内侧。
7、作为本实用新型的一种优选技术方案,所述行走机构的内部中心处开设有移动腔,所述移动腔内设有移动轮,所述移动腔的外部四周均设有吸附口。
8、与现有技术相比,本实用新型能达到的有益效果是:
9、本实用新型通过设置清洁腔和第一清洁棉以及第二清洁棉,在使用本装置时可以首先使用第一清洁棉,过程中可以通过伸缩杆带动第一清洁棉回到清洁腔并伸出第二清洁棉,方便自动对清洁棉进行更换清洁,无需在擦拭窗户的过程中将装置收回并更换清洁棉。
技术特征:
1.一种具有定位功能的擦窗机器人,包括擦窗机器人本体(1),所述擦窗机器人本体(1)的下方设有感应触点(2)和行走机构(3),其特征在于:所述擦窗机器人本体(1)的底部向内开设有清洁腔(7),所述清洁腔(7)位于行走机构(3)的外侧,所述清洁腔(7)内部设有第一清洁棉(8)和第二清洁棉(9),所述第一清洁棉(8)和第二清洁棉(9)的上方均连接有伸缩杆(10),所述伸缩杆(10)设有多组且固定在清洁腔(7)内部。
2.根据权利要求1所述的一种具有定位功能的擦窗机器人,其特征在于:所述第一清洁棉(8)套设在第二清洁棉(9)的外侧,所述第一清洁棉(8)和第二清洁棉(9)上位于清洁腔(7)内部的一端均固定有安装块(12),所述伸缩杆(10)的一端固定在清洁腔(7)内壁面上,所述伸缩杆(10)的另一端固定连接有活动板(11),所述活动板(11)与安装块(12)之间卡接。
3.根据权利要求2所述的一种具有定位功能的擦窗机器人,其特征在于:所述清洁腔(7)内部位于两组所述活动板(11)之间设有固定块(14),所述固定块(14)的上端与清洁腔(7)的内壁之间固定连接,所述固定块(14)的两侧均开设有第二滑槽(15),所述清洁腔(7)内部两侧均开设有第一滑槽(13),所述活动板(11)的两侧分别位于第二滑槽(15)与第一滑槽(13)内部滑动。
4.根据权利要求2所述的一种具有定位功能的擦窗机器人,其特征在于:所述活动板(11)的下方向内开设有安装槽(16),所述安装块(12)的上端伸入安装槽(16)内部,所述安装块(12)上方的两侧均固定有卡块(18),所述安装槽(16)内部两侧均开设有固定槽(17),两组所述卡块(18)分别位于两组固定槽(17)内并与其卡合连接,所述卡块(18)为丁腈橡胶材质。
5.根据权利要求1所述的一种具有定位功能的擦窗机器人,其特征在于:所述感应触点(2)设有四组且均匀分布在擦窗机器人本体(1)下方的四周,所述第一清洁棉(8)和第二清洁棉(9)均位于感应触点(2)的内侧。
6.根据权利要求1所述的一种具有定位功能的擦窗机器人,其特征在于:所述行走机构(3)的内部中心处开设有移动腔(5),所述移动腔(5)内设有移动轮(6),所述移动腔(5)的外部四周均设有吸附口(4)。
技术总结
本技术公开了一种具有定位功能的擦窗机器人,包括擦窗机器人本体,所述擦窗机器人本体的下方设有感应触点和行走机构,所述擦窗机器人本体的底部向内开设有清洁腔,所述清洁腔位于行走机构的外侧,所述清洁腔内部设有第一清洁棉和第二清洁棉,所述第一清洁棉和第二清洁棉的上方均连接有伸缩杆,所述伸缩杆设有多组且固定在清洁腔内部,本技术通过设置清洁腔和第一清洁棉以及第二清洁棉,在使用本装置时可以首先使用第一清洁棉,过程中可以通过伸缩杆带动第一清洁棉回到清洁腔并伸出第二清洁棉,方便自动对清洁棉进行更换清洁,无需在擦拭窗户的过程中将装置收回并更换清洁棉。
技术研发人员:张勇,杨军令,朱志勇
受保护的技术使用者:上海妙尔法人工智能科技有限公司
技术研发日:20231204
技术公布日:2024/7/9
- 还没有人留言评论。精彩留言会获得点赞!