清洁装置的控制方法及清洁装置与流程
本申请涉及清洁,具体而言,涉及一种清洁装置的控制方法及清洁装置。
背景技术:
1、扫地机、拖地机或洗地机等清洁装置是智能家用电器的一种,能凭借一定的人工智能,自动在房间内完成地面清理工作。清洁装置的清扫组件(如扫地机底部的中扫、边刷等组件)能够将地面的垃圾清扫进扫地机器人,在清扫组件清扫后,还会通过滚筒拖布对地面进行湿清洁,以将地面的尘埃、污渍、脏污痕迹等清扫组件无法清理干净的污染情形进行清理,提高对地面的清洁效果。
2、其中,在滚筒拖布对地面进行湿清洁的过程中,清洁装置会将自身清水盒中的清水不断喷洒到滚筒拖布上对拖布进行清洁,拖布清洁后产生的污水需要进行回收。对此,清洁装置内还设置有抵接于滚筒拖布上的刮板,在滚筒拖布旋转工作的过程中,刮板可将滚筒拖布上的污水刮下并通过刮板上的出水口导流至清洁装置的污水盒内。在此过程中,由于滚筒拖布上也会沾染地面的一些垃圾,长此以往,这些垃圾将会聚集于刮板靠近滚筒拖布一侧的空间内,滚筒拖布与这些垃圾接触后,将会影响滚筒拖布的自清洁效果。
技术实现思路
1、本申请的主要目的在于提供一种清洁装置的控制方法及清洁装置,以至少解决背景技术中提到的刮板靠近滚筒拖布一侧的空间内聚集的垃圾会影响滚筒拖布的自清洁效果的问题。
2、根据本申请的一个方面,提供了一种清洁装置的控制方法,所述清洁装置包括清洁件和与所述清洁件抵接的刮板,所述方法包括:
3、根据接收的第一控制信号,控制所述清洁件相对所述刮板沿第一方向旋转,以使所述清洁件将所述刮板上的垃圾刮落;
4、其中,所述清洁件执行清洁任务时相对所述刮板旋转的方向为第二方向,所述第一方向为所述第二方向的反方向。
5、进一步地,控制所述清洁件相对所述刮板沿第一方向旋转之后,所述方法还包括:
6、控制清扫组件将来自所述刮板上的垃圾清扫至尘盒。
7、进一步地,控制清扫组件将来自所述刮板上的垃圾清扫至尘盒之后,所述方法还包括:
8、控制所述清洁装置行驶至基站,以使所述基站对所述尘盒中的垃圾进行回收。
9、进一步地,若所述清洁件将所述刮板上的垃圾刮落至待清洁面,则在控制清扫组件将来自所述刮板上的垃圾清扫至尘盒之后,所述方法还包括:
10、获取所述清洁装置通过所述清扫组件清扫垃圾时在所述待清洁面上的运动轨迹,以在所述清洁件沿所述第二方向旋转的过程中,控制所述清洁装置带动所述清洁件沿所述运动轨迹对所述待清洁面进行二次清洁,所述运动轨迹包括所述清扫组件将所述待清洁面上的来自所述刮板上的垃圾进行清扫时行经的路径。
11、进一步地,所述第一控制信号包括所述清洁装置已清扫完预定清扫区域的信号,控制所述清洁件相对所述刮板沿第一方向旋转之前,所述方法还包括:
12、判断所述清洁装置是否已清扫完预定清扫区域,若是,控制所述清洁件沿所述第一方向旋转,若否,控制所述清洁装置对所述预定清扫区域的剩余区域进行清扫。
13、进一步地,控制所述清洁件相对所述刮板沿第一方向旋转的过程中,所述方法还包括:
14、判断所述清洁件沿所述第一方向旋转的旋转圈数是否达到预定圈数,若是,控制所述清洁件停止沿第一方向转动;或者,
15、判断所述清洁件沿所述第一方向旋转的旋转时间是否达到预定时长,若是,控制所述清洁件停止沿第一方向转动。
16、进一步地,所述方法还包括:
17、通过检测装置检测聚集在所述刮板上的垃圾量,以获得用于衡量所述垃圾量的第一检测信息;
18、根据所述第一检测信息判断所述垃圾量是否达到第一阈值,若是,控制所述清洁件沿所述第一方向旋转。
19、进一步地,所述检测装置包括红外传感器和/或超声波传感器,根据所述第一检测信息判断所述垃圾量是否达到第一阈值之前,所述方法还包括:
20、将所述红外传感器和/或所述超声波传感器设置于所述刮板上,以根据接收的所述红外传感器和/或所述超声波传感器发送的所述第一检测信息,判断所述垃圾量是否达到所述第一阈值。
21、进一步地,所述刮板包括板主体和刮水部,所述刮水部设置于所述板主体靠近所述清洁件的一侧并与所述板主体围设形成有垃圾存储槽,所述刮水部抵接于所述清洁件上,所述方法还包括:
22、将多个所述红外传感器和/或多个所述超声波传感器沿所述垃圾存储槽的长度方向排布设置于所述板主体上,以使多个所述红外传感器和/或多个所述超声波传感器对所述垃圾存储槽沿自身长度方向的各部位进行垃圾检测,以根据多个所述红外传感器和/或多个所述超声波传感器将检测获得的多个所述第一检测信息判断所述垃圾量是否达到所述第一阈值。
23、进一步地,所述检测装置还包括称重传感器,根据所述第一检测信息判断所述垃圾量是否达到第一阈值之前,所述方法还包括:
24、将所述称重传感器设置于所述刮板上,以根据接收的所述称重传感器发送的称重数据,判断所述垃圾量是否达到所述第一阈值。
25、进一步地,所述方法还包括:
26、在所述清洁件沿所述第一方向旋转完毕后,通过所述检测装置检测所述刮板靠近所述清洁件的一侧是否还存在垃圾的第二检测信息,以根据所述第二检测信息判断所述垃圾量是否达到第二阈值,若是,控制告警器发出告警信息。
27、根据本申请的另一个方面,提供了一种清洁装置,包括:
28、本体;
29、清洁件,所述清洁件安装于所述本体内;
30、刮板,所述刮板安装于所述本体内并与所述清洁件抵接;
31、控制器,所述控制器安装于所述本体内,所述控制器用于执行所述的清洁装置的控制方法;
32、检测装置,所述检测装置安装于所述刮板上并与所述控制器电连接,所述检测装置用于检测所述刮板上的垃圾量。
33、本申请提供的清洁装置的控制方法,可根据接收的第一控制信号,来控制清洁装置的清洁件相对刮板沿第一方向旋转,以使清洁件将刮板上的垃圾刮落。第一方向为清洁件执行清洁任务时相对刮板旋转的第二方向的反方向,在清洁件沿第二方向旋转时,刮板能够将清洁件上的污水刮下以使清洁件保持较洁净的湿清洁状态,在此过程中,清洁件上的垃圾会被刮板阻拦并积累于刮板靠近清洁件的一侧。为避免刮板靠近清洁件一侧的垃圾积累较多时,导致清洁件在后续的清洁任务中与垃圾接触从而降低自身的洁净程度,本申请通过控制清洁件相对刮板沿第一方向旋转,来使清洁件能够将刮板上的垃圾刮落,避免刮板积累过多的垃圾,进而避免清洁件与垃圾直接接触,提高清洁件后续工作过程的洁净程度。
技术特征:
1.一种清洁装置的控制方法,所述清洁装置包括清洁件(11)和与所述清洁件(11)抵接的刮板(12),其特征在于,所述方法包括:
2.根据权利要求1所述的清洁装置的控制方法,其特征在于,控制所述清洁件(11)相对所述刮板(12)沿第一方向旋转之后,所述方法还包括:
3.根据权利要求2所述的清洁装置的控制方法,其特征在于,若所述清洁件(11)将所述刮板(12)上的垃圾刮落至待清洁面,则在控制清扫组件将来自所述刮板(12)上的垃圾清扫至尘盒之后,所述方法还包括:
4.根据权利要求1所述的清洁装置的控制方法,其特征在于,所述第一控制信号包括所述清洁装置已清扫完预定清扫区域的信号,控制所述清洁件(11)相对所述刮板(12)沿第一方向旋转之前,所述方法还包括:
5.根据权利要求1所述的清洁装置的控制方法,其特征在于,控制所述清洁件(11)相对所述刮板(12)沿第一方向旋转的过程中,所述方法还包括:
6.根据权利要求1至5任一项所述的清洁装置的控制方法,其特征在于,所述方法还包括:
7.根据权利要求6所述的清洁装置的控制方法,其特征在于,所述检测装置包括红外传感器和/或超声波传感器,根据所述第一检测信息判断所述垃圾量是否达到第一阈值之前,所述方法还包括:
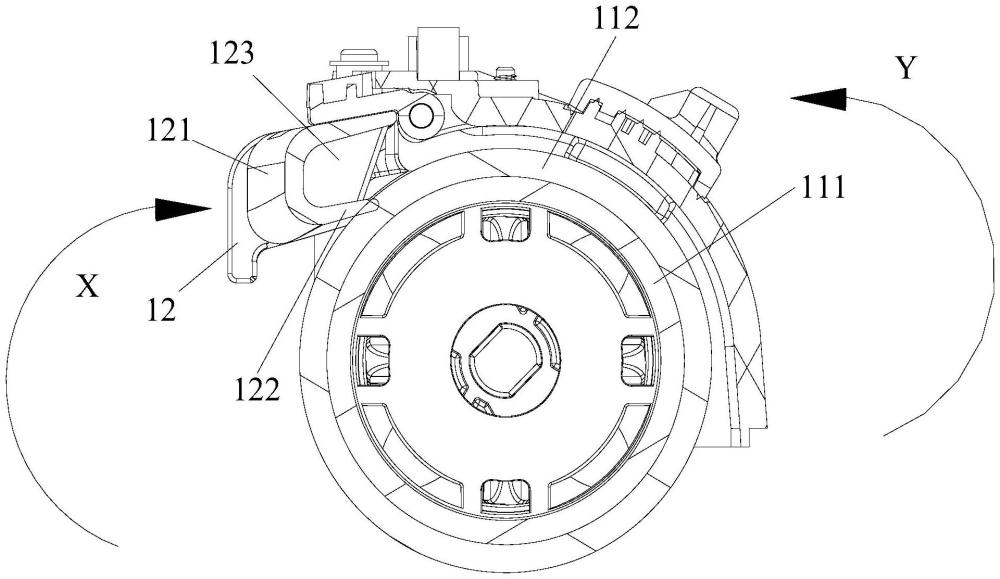
8.根据权利要求7所述的清洁装置的控制方法,其特征在于,所述刮板(12)包括板主体121和刮水部(122),所述刮水部(122)设置于所述板主体121靠近所述清洁件(11)的一侧并与所述板主体121围设形成有垃圾存储槽(123),所述刮水部(122)抵接于所述清洁件(11)上,所述方法还包括:
9.根据权利要求6所述的清洁装置的控制方法,其特征在于,所述方法还包括:
10.一种清洁装置,其特征在于,包括:
技术总结
本发明公开了一种清洁装置的控制方法及清洁装置,清洁装置包括清洁件和与清洁件抵接的刮板,方法包括:根据接收的第一控制信号,控制清洁件相对刮板沿第一方向旋转,以使清洁件将刮板上的垃圾刮落;其中,清洁件执行清洁任务时相对刮板旋转的方向为第二方向,第一方向为第二方向的反方向。本发明解决了刮板靠近滚筒拖布一侧的空间内聚集的垃圾会影响滚筒拖布的自清洁效果的问题。
技术研发人员:黄爱祥,郭艳强,狄意和
受保护的技术使用者:深圳市杉川机器人有限公司
技术研发日:
技术公布日:2024/9/12
- 还没有人留言评论。精彩留言会获得点赞!