清洁机器人清扫路径采集生成方法、装置、设备及介质与流程
本申请涉及到清洁机器人,具体而言,涉及到一种清洁机器人清扫路径采集生成方法、装置、设备及介质。
背景技术:
1、随着科技的发展和社会的进步,人们对生活环境的要求越来越高,尤其是对于室内环境的清洁度要求也越来越高。因此,清洁机器人作为一种新型的智能家电产品,在市场上得到了广泛的关注和发展。目前,市面上已经出现了各种类型的清洁机器人,如扫地机器人、拖地机器人、空气净化机器人等,这些产品的出现极大地改善了人们的生活质量和工作效率;
2、通常情况下,清洁机器人的路径规划可以通过两种方式来实现:一种是预编程路径规划,另一种是人工指导机器人学习特定任务的过程。在人工示教过程中,如果路径规划算法不够精准,在人工操作示教过程中产生的非必要外的路线行走路径,例如回退操作,可能会导致后续机器人在自动工作的过程中重复清扫某些错误区域或遗漏某些区域,影响机器人的清扫效果。
3、因此,如何减少人工示教规划路线的过程中不规范的示教路径对生成清扫路线的影响,提升清扫路线的精确度的问题亟待解决。
技术实现思路
1、本申请的主要目的为提供一种清洁机器人清扫路径采集生成方法、装置、设备及介质,旨在解决如何减少人工示教规划路线的过程中不规范的示教路径对生成清扫路线的影响,提升清扫路线的精确度的问题的技术问题。
2、本申请的第一方面提出一种清洁机器人清扫路径采集生成方法,包括:
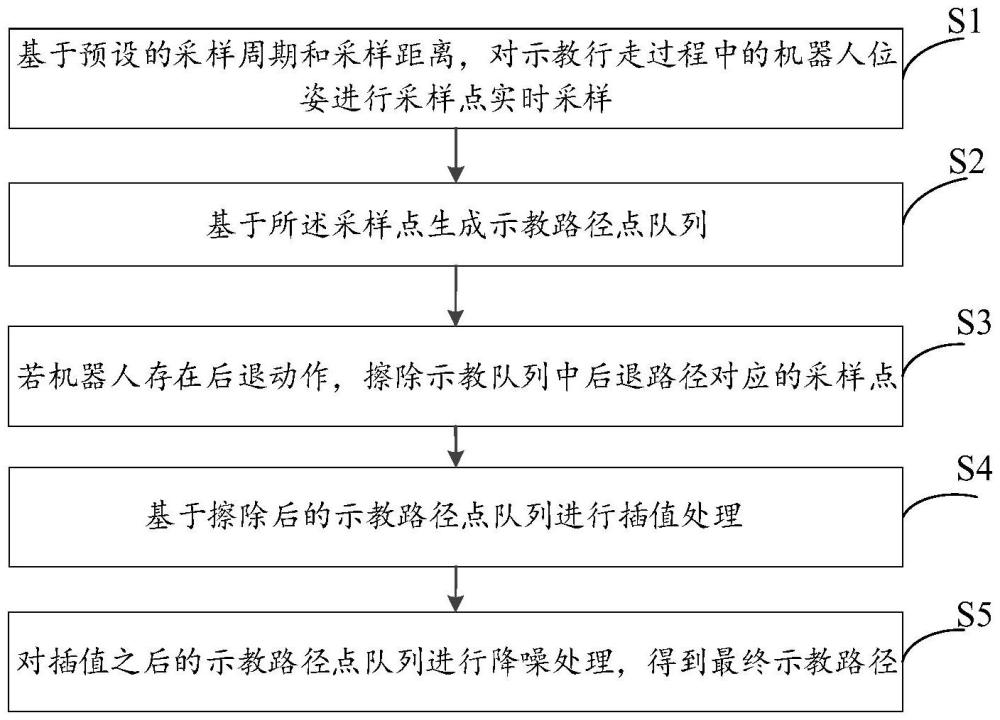
3、基于预设的采样周期和采样距离,对示教行走过程中的机器人位姿进行采样点实时采样;
4、基于所述采样点生成示教路径点队列;
5、若机器人存在后退动作,擦除示教路径点队列中后退路径对应的采样点;
6、基于擦除后的示教路径点队列进行插值处理;
7、对插值之后的示教路径点队列进行降噪处理,得到最终示教路径。
8、进一步地,所述基于预设的采样周期和采样距离,对示教行走过程中的机器人位姿进行采样点实时采样的步骤,包括:
9、基于示教启动指令,加载预设的采样周期和采样距离;
10、基于所述采样周期和采样距离,通过实时获取机器人的定位信息,生成采样点。
11、进一步地,所述基于所述采样点生成示教路径点队列的步骤,包括:
12、判断当前采样点机器人反馈速度是否小于0;
13、若不小于0,判断当前采样点的向量角和示教路径点队列的切线角插值是否小于预设角度阈值;
14、若小于预设角度阈值,基于所述采样点更新示教路径点队列。
15、进一步地,所述若机器人存在后退动作,擦除示教路径点队列中后退路径对应的采样点的步骤,包括:
16、若当前采样点机器人的反馈速度小于0,判断为机器人存在后退动作;
17、将存在后退动作对应的采样点视为无效采样点;
18、若在无效采样点之后,识别到机器人变为反馈速度大于0,且示教路径点队列更新了指定数量的采样点时,识别当前位置对应的采样点qm;
19、识别无效采样点之前的示教路径点队列中与当前采样点qm最近的采样点pn,其中,pn到qm之间的所有采样点和无效采样点判定为后退路径对应的采样点;
20、将后退路径对应的采样点进行擦除。
21、进一步地,所述基于擦除后的示教路径点队列进行插值处理的步骤,包括:
22、根据预设的插值算法,基于擦除后的示教路径点队列中的pn与qm,构建插值函数;
23、基于采样距离,在所述插值函数在pn与qm之间等距插入新的采样点,完成插值处理。
24、进一步地,所述对插值之后的示教路径点队列进行降噪处理,得到最终示教路径的步骤之后,包括:
25、对插值之后示教路径点队列中的路径点,进行高斯平滑,滤除示教过程中的位置噪点及示教锐角;
26、对高斯平滑之后的路径点进行精插值;
27、对精确插值之后的路径进行二次平滑,获得最终的示教路径。
28、本申请的第二方面提出一种清洁机器人清扫路径采集生成装置,包括:
29、实时采样单元,用于基于预设的采样周期和采样距离,对示教行走过程中的机器人位姿进行采样点实时采样;
30、队列生成单元,用于基于所述采样点生成示教路径点队列;
31、后退识别单元,用于若机器人存在后退动作,擦除示教路径点队列中后退路径对应的采样点;
32、插值单元,用于基于擦除后的示教路径点队列进行插值处理;
33、降噪单元,用于对插值之后的示教路径点队列进行降噪处理,得到最终示教路径。
34、本申请的第三方面提出一种清洁机器人清扫路径采集生成设备,包括:
35、处理器;
36、存储器,用于存储计算机程序;
37、其中,所述处理器执行所述计算机程序时实现上述中任一项所述的清洁机器人清扫路径采集生成方法。
38、本申请的第四方面提出一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现上述中任一项所述的清洁机器人清扫路径采集生成方法。
39、有益效果:
40、本申请通过对示教行走过程中的机器人位姿进行实时采样,并结合预设的采样周期和采样距离,可以精细地捕捉到机器人的实际运动轨迹,避免因采样频率过低而导致的路径信息丢失,识别并擦除示教路径点队列中由于后退动作产生的无效采样点,能够有效避免因人为操作不当造成的路径偏差,确保生成的路径不会重复清扫同一区域或遗漏未清扫区域,进而显著提高了机器人的清扫效率和质量。在去除无效采样点后的示教路径点队列中插入新的采样点,以保持路径的连续性和连贯性。通过这种方法,即使在去除了一些采样点后,后续机器人依然能沿着一条平滑、自然的路径进行清扫作业,同时通过平滑处理滤除示教过程中产生的位置噪点和示教锐角,提高路径的稳定性,避免因路径抖动而产生的不必要的能耗,进一步提升了机器人的工作性能和使用寿命。
技术特征:
1.一种清洁机器人清扫路径采集生成方法,其特征在于,包括:
2.根据权利要求1所述的清洁机器人清扫路径采集生成方法,其特征在于,所述基于预设的采样周期和采样距离,对示教行走过程中的机器人位姿进行采样点实时采样的步骤,包括:
3.根据权利要求1所述的清洁机器人清扫路径采集生成方法,其特征在于,所述基于所述采样点生成示教路径点队列的步骤,包括:
4.根据权利要求1所述的清洁机器人清扫路径采集生成方法,其特征在于,所述若机器人存在后退动作,擦除示教路径点队列中后退路径对应的采样点的步骤,包括:
5.根据权利要求4所述的清洁机器人清扫路径采集生成方法,其特征在于,所述基于擦除后的示教路径点队列进行插值处理的步骤,包括:
6.根据权利要求1所述的清洁机器人清扫路径采集生成方法,其特征在于,所述对插值之后的示教路径点队列进行降噪处理,得到最终示教路径的步骤,包括:
7.根据权利要求1所述的清洁机器人清扫路径采集生成方法,其特征在于,所述对插值之后的示教路径点队列进行降噪处理,得到最终示教路径的步骤之后,包括:
8.一种清洁机器人清扫路径采集生成装置,其特征在于,包括:
9.一种清洁机器人清扫路径采集生成设备,其特征在于,包括:
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现权利要求1至7中任一项所述的清洁机器人清扫路径采集生成方法。
技术总结
本申请涉及到清洁机器人技术领域,公开了清洁机器人清扫路径采集生成方法、装置、设备及介质,其方法包括:基于预设的采样周期和采样距离,对示教行走过程中的机器人位姿进行采样点实时采样;基于所述采样点生成示教路径点队列;若机器人存在后退动作,擦除示教路径点队列中后退路径对应的采样点;基于擦除后的示教路径点队列进行插值处理;对插值之后的示教路径点队列进行降噪处理,得到最终示教路径。本申请能够有效避免因人为示教操作不当造成的路径偏差,确保生成的路径不会重复清扫同一区域或遗漏未清扫区域,进而显著提高了机器人的清扫效率和质量。
技术研发人员:周沛建
受保护的技术使用者:奇勃(深圳)科技有限公司
技术研发日:
技术公布日:2024/11/14
- 还没有人留言评论。精彩留言会获得点赞!