烹饪机器人及其烹饪方法和可读存储介质与流程
本申请涉及机器人,特别地,涉及一种烹饪机器人及其烹饪方法和可读存储介质。
背景技术:
1、随着社会的发展和科技的进步,机器人在家庭、商业等场景中的应用逐渐成为现实。人们对于获得自动化、互联网化、智能化的机器人助手的需求日益增长。这种需求推动了协作机器人的发展,尤其是在餐饮行业,人们期待通过智能化技术提高出餐效率、降低成本,增加市场竞争力。协作机器人的出现,使得人类可以与机器人共享工作空间,提高了安全性和协同作业的能力。
2、传统的协作机器人在厨房部署上存在一定的局限性,它们往往需要较大的空间,而且存在过多的冗余动作,相较于人工出餐效率大打折扣。在此之下,将机器人进行轻量化设计能够使其部署更加灵活、更有效地利用空间、并且动作更加精确;同时,还能够大幅降低产品的生产成本。
3、然而,厨房场景往往要求机器人能够执行复杂的动作,以在三维立体空间中完成一系列的烹饪任务,而复杂动作的完成又依赖于机器人关节和手臂的数量、自由度的丰富程度,这成为了机器人轻量化的悖论。因此,厨房场景对机器人的轻量化设计提出了严峻的考验。
4、如何实现机器人的轻量化设计,以使其能够在厨房场景中灵活部署、保障安全和易于维护,同时还能降低空间占用及生产成本,并且还要拥有精确运动以完成一系列复杂烹饪动作的能力,该问题丞待解决。
技术实现思路
1、本申请一方面提供了一种烹饪机器人,包括:烹饪组件;行程组件,设置于所述烹饪组件的背面一侧;以及机械臂,与所述行程组件耦合,其中,所述机械臂能够沿所述行程组件的延伸方向移动。
2、在一个实施方式中,所述机械臂的关节数量不超过4个。
3、在一个实施方式中,所述机械臂的关节数量不超过3个。
4、在一个实施方式中,所述烹饪机器人,还包括:厨具组件;以及机械手,与所述机械臂连接,用于抓取所述厨具组件的抓握部,其中,在烹饪状态下,所述抓握部靠近所述烹饪组件的正面一侧。
5、在一个实施方式中,所述机械臂包括:第一关节、第二关节、第三关节;第一臂,连接所述第一关节和所述第二关节;第二臂,连接所述第二关节和所述第三关节;以及联接器,一端与所述第三关节连接,以随着所述第三关节的转动而转动,另一端与所述机械手的侧壁连接,以带动所述机械手绕着所述第三关节转动。
6、在一个实施方式中,所述第三关节的延伸方向、所述联接器的另一端的延伸方向均与所述行程组件的延伸方向相同,以及所述侧壁包括所述机械手的与其厚度方向垂直的壁。
7、在一个实施方式中,所述第一关节和所述第二关节的延伸方向均与所述第三关节的延伸方向相同,以及在从所述烹饪状态到出餐状态的过程中,所述第一关节的旋转角度w1满足:50°≤w1≤80°,所述第二关节的旋转角度w2满足:45°≤w2≤78°,所述第三关节的旋转角度w3满足:95°≤w3≤160°。
8、在一个实施方式中,所述第一臂和/或所述第二臂带动所述第三关节靠近或远离所述行程组件。
9、在一个实施方式中,所述烹饪机器人还包括:出餐组件,设置于所述行程组件的正面一侧,包括出餐口,其中,在所述过程中,所述机械手抓取所述厨具组件,所述机械臂运动至所述行程组件的靠近所述出餐组件的一端,以及所述第三关节带动所述机械手顺时针旋转以翻转所述厨具组件。
10、在一个实施方式中,所述厨具组件包括厨具本体和所述抓握部,以及在翻转所述厨具组件以进行出餐时,所述厨具本体的开口在投影平面上的投影位于所述出餐口在所述投影平面上的投影之内,其中,所述投影平面包括所述出餐口所在的平面。
11、在一个实施方式中,所述出餐组件包括出餐部,所述出餐部具有所述出餐口,所述出餐部的形状包括倒立的梯形体,以及所述梯形体的远离所述行程组件的面的面积不小于所述梯形体的靠近所述行程组件的面的面积的1.2倍,且不大于5倍。
12、在一个实施方式中,所述梯形体的靠近所述烹饪组件的面在所述投影平面上的投影形状包括梯形,所述梯形体的远离所述烹饪组件的面在所述投影平面上的投影形状包括线段。
13、在一个实施方式中,所述烹饪机器人还包括:控制模组,分别与所述机械臂和所述行程组件通信连接,以控制所述机械臂的运动,其中,所述控制模组调控所述机械臂沿所述行程组件的延伸方向移动,以及调控所述机械臂的关节转动。
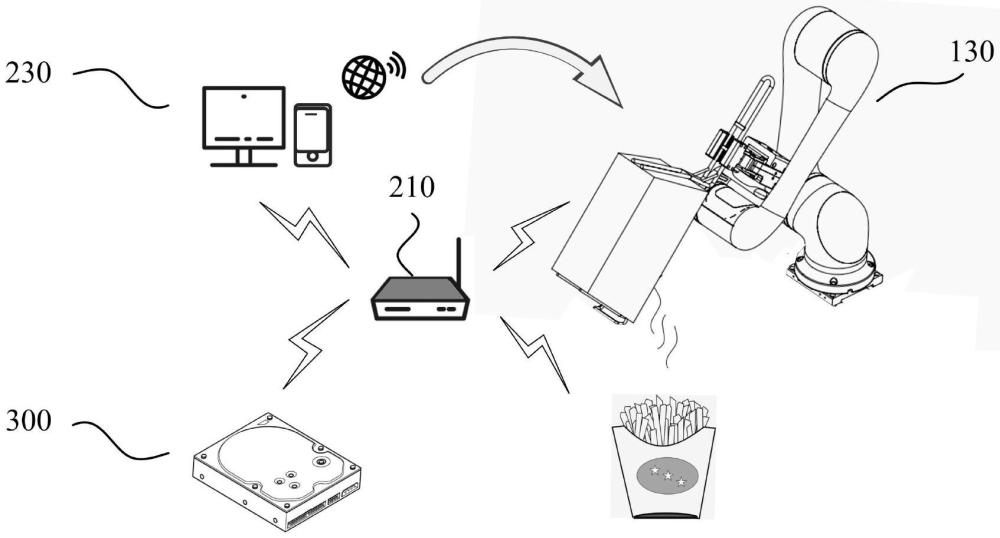
14、在一个实施方式中,所述烹饪机器人还包括:视觉模组,用于识别目标物体,并将捕获的信号传递至所述控制模组;以及点餐模组,用于记录用户点餐的订单信息,并将所述订单信息传递至所述控制模组。
15、在一个实施方式中,所述烹饪机器人还包括:冷藏下料模组,包括冷藏腔体和下料器,所述冷藏腔体用于冷藏食品,所述下料器用于将所述冷藏腔体内的食品传送至出料口,其中,所述出料口的高度低于所述第一关节的高度,所述控制模组控制所述机械臂带动所述机械手移动至所述出料口,以抓取所述厨具组件。
16、本申请的另一方面还提供一种烹饪机器人的烹饪方法,所述烹饪方法包括:获取用户点餐的订单信息;将所述订单信息下发至上述任一实施方式中所述的烹饪机器人;根据所述订单信息向厨具组件下料;所述烹饪机器人通过机械手抓取所述厨具组件进行烹饪;以及在烹饪完成后,所述烹饪机器人的机械臂带动所述机械手运动,以翻转所述厨具组件进行出餐。
17、本申请的再一方面还提供一种计算机可读存储介质,所述计算机可读存储介质中存储有计算机执行指令,当所述指令被处理器执行时,实现上述任一实施方式中所述的机械臂的状态。
18、本申请提供的烹饪机器人可具有以下至少一个有益效果:
19、根据本申请的一些实施方式中的烹饪机器人,其机械臂与行程组件耦合,并且行程组件设置在烹饪组件的背面一侧。该设计使得机械臂在执行任务动作时,不会影响到烹饪组件的正面一侧,有利于保障处于正面位置处的用户的安全,此外,还有利于非工作状态时用户对烹饪机器人的清洁和维护;以及
20、根据本申请的一些实施方式中的烹饪机器人,机械臂与行程组件耦合,机械臂能够沿行程组件的延伸方向移动,该设计大幅增加了机械臂的工作范围,使其拥有并行处理任务的能力。
21、本发明实施方式的特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明实施方式的目的和其他优点可通过在说明书、权利要求书以及附图中所特别指出的结构和/或功能来实现和获得。
技术特征:
1.一种烹饪机器人,其特征在于,所述烹饪机器人包括:
2.根据权利要求1所述的烹饪机器人,其特征在于,所述机械臂的关节数量不超过4个。
3.根据权利要求2所述的烹饪机器人,其特征在于,所述机械臂的关节数量不超过3个。
4.根据权利要求3所述的烹饪机器人,其特征在于,还包括:
5.根据权利要求4所述的烹饪机器人,其特征在于,所述机械臂包括:
6.根据权利要求5所述的烹饪机器人,其特征在于,所述第三关节的延伸方向、所述联接器的另一端的延伸方向均与所述行程组件的延伸方向相同,以及所述侧壁包括所述机械手的与其厚度方向垂直的壁。
7.根据权利要求5所述的烹饪机器人,其特征在于,所述第一关节和所述第二关节的延伸方向均与所述第三关节的延伸方向相同,以及
8.根据权利要求7所述的烹饪机器人,其特征在于,所述第一臂和/或所述第二臂带动所述第三关节靠近或远离所述行程组件。
9.根据权利要求7所述的烹饪机器人,其特征在于,还包括:
10.根据权利要求9所述的烹饪机器人,其特征在于,所述厨具组件包括厨具本体和所述抓握部,以及在翻转所述厨具组件以进行出餐时,所述厨具本体的开口在投影平面上的投影位于所述出餐口在所述投影平面上的投影之内,
11.根据权利要求10所述的烹饪机器人,其特征在于,所述出餐组件包括出餐部,所述出餐部具有所述出餐口,所述出餐部的形状包括倒立的梯形体,以及
12.根据权利要求11所述的烹饪机器人,其特征在于,所述梯形体的靠近所述烹饪组件的面在所述投影平面上的投影形状包括梯形,所述梯形体的远离所述烹饪组件的面在所述投影平面上的投影形状包括线段。
13.根据权利要求5所述的烹饪机器人,其特征在于,还包括:
14.根据权利要求13所述的烹饪机器人,其特征在于,还包括:
15.根据权利要求13所述的烹饪机器人,其特征在于,还包括:
16.一种烹饪机器人的烹饪方法,其特征在于,所述烹饪方法包括:
17.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质中存储有计算机执行指令,当所述指令被处理器执行时,实现如权利要求1至15中任一所述的机械臂的状态。
技术总结
本申请提供了一种烹饪机器人及其烹饪方法和可读存储介质,所述烹饪机器人包括:烹饪组件;行程组件,设置于所述烹饪组件的背面一侧;以及机械臂,与所述行程组件耦合,其中,所述机械臂能够沿所述行程组件的延伸方向移动。本申请的烹饪机器人具有轻量化、成本低、集成度高、智能化和自动化程度高、出餐效率高等优势。
技术研发人员:邢兴国,李俞奇,陈震
受保护的技术使用者:享刻智能技术(北京)有限公司
技术研发日:
技术公布日:2024/12/30
- 还没有人留言评论。精彩留言会获得点赞!