清洁机器人的制作方法
本发明涉及清洁设备,特别是涉及一种清洁机器人。
背景技术:
1、清洁机器人是一种具有人工智能系统,能够自动在房间内完成地板清洁工作的设备。一方面,清洁机器人减轻了用户室内清洁工作的强度,另一方面,清洁机器人本身带有人工智能系统,具有一定的娱乐性,清洁机器人能够在一定程度上丰富用户的精神生活,故而备受用户喜爱。
2、目前市场上的清洁机器人多配备实时自清洁功能,包括用于下水的水泵结构和抽污的气泵结构,其工作时容易产生噪音和振动,影响用户体验感。
技术实现思路
1、基于此,有必要针对现有技术中的清洁机器人工作时容易产生噪音和振动,影响用户体验感的问题,提供一种清洁机器人。
2、其技术方案如下:
3、一方面,提供了一种清洁机器人,其特征在于,包括:
4、底座;
5、轮组件,包括相对设置的两个主动轮,两个所述主动轮之间形成减振区域;
6、减振结构,设置于所述轮组件与所述底座之间,并用于对所述底座进行减振;
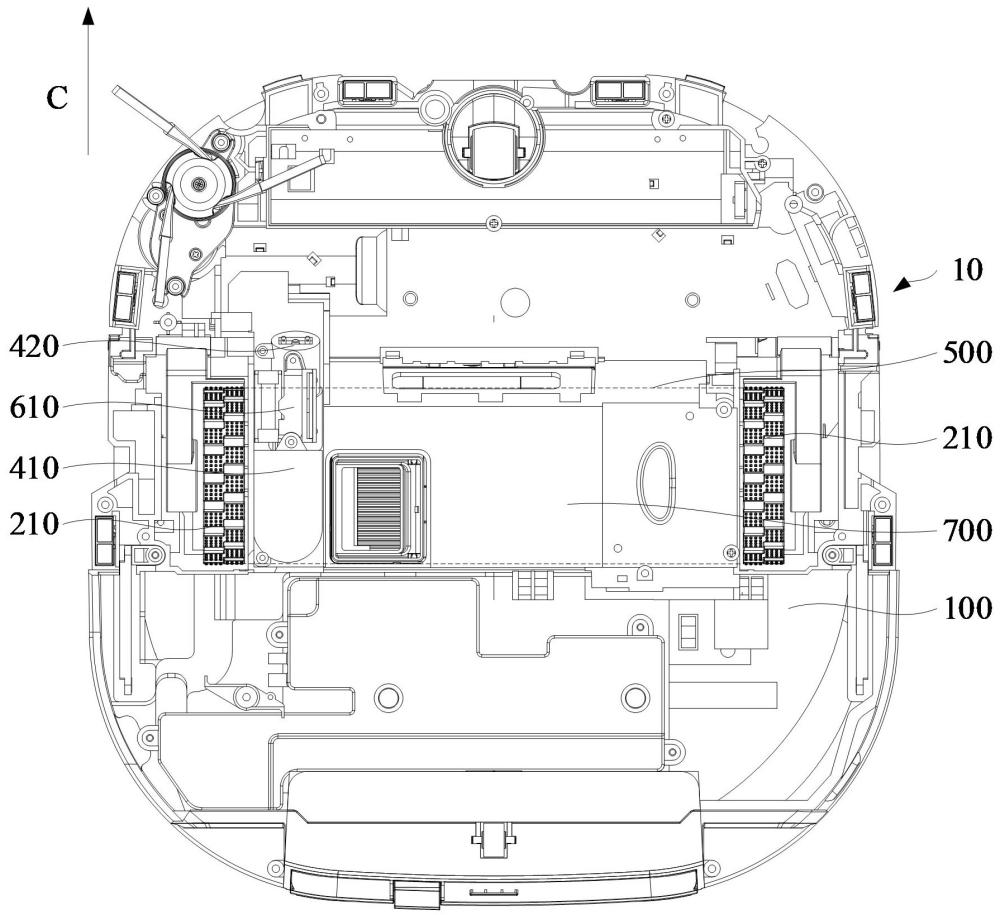
7、泵组件,包括安装于所述底座上的气泵和水泵,所述气泵的重心位置和所述水泵的重心位置中的至少一个位于所述减振区域内。
8、上述实施例中的清洁机器人,通过将气泵的重心位置和所述水泵的重心位置中的至少一个设置在两个主动轮之间的减振区域内,泵组件工作时产生的振动能够及时传递到减振结构上,利用主动轮与底座之间的减振结构吸收泵组件产生的振动,降低泵组件工作带来的振动以及噪音影响,提高用户体验感。
9、下面进一步对技术方案进行说明:
10、在其中一个实施例中,所述气泵的重心位置和所述水泵的重心位置均位于所述减振区域内。
11、在其中一个实施例中,所述泵组件还包括包裹于所述气泵的外表面的第一减振套、及包裹于所述水泵的外表面的第二减振套,所述第一减振套及所述第二减振套均安装于所述底座上。
12、在其中一个实施例中,所述清洁机器人还包括用于清水箱缺水和水满检测的管路板组件,所述管路板组件安装于所述水泵的下方,并与水泵对应连通。
13、在其中一个实施例中,所述管路板组件的顶部设有第一固定部,所述第二减振套的底部设有第二固定部,所述第二固定部与所述第一固定部固定连接。
14、在其中一个实施例中,所述气泵位于所述管路板组件的一侧,所述第一减振套靠近所述管路板组件的一侧设有第三固定部,所述第三固定部固定于所述底座上,所述管路板组件靠近所述第一减振套的一侧设有第四固定部,所述第四固定部固定于所述第三固定部上。
15、在其中一个实施例中,所述第三固定部设有第一安装孔,所述第四固定部设有与所述第一安装孔对应设置的第二安装孔,所述底座设有第一螺柱,所述第一螺柱穿过所述第一安装孔并伸入所述第二安装孔内,所述清洁机器人还包括第一螺接件,所述第一螺接件与所述第一螺柱螺纹连接,以将所述第三固定部、所述第四固定部及所述底座固定为一体。
16、在其中一个实施例中,所述第一减振套远离所述管路板组件的一侧还设有第五固定部,所述第五固定部固定于所述底座上;
17、和/或,所述管路板组件远离所述第一减振套的一侧还设有第六固定部,所述第六固定部固定于所述底座上;
18、和/或,所述第二减振套远离所述第一减振套的一侧还设有第七固定部,所述第七固定部固定于所述底座上。
19、在其中一个实施例中,所述底座局部下凹以形成安装槽,所述安装槽至少部分位于所述减振区域内,所述泵组件安装于所述安装槽。
20、在其中一个实施例中,将两个所述主动轮相对的内侧壁所在平面设置为第一平面,在沿所述底座的前后方向上,将两个所述主动轮的前端和后端的两切面设置为第二平面,所述第一平面及所述第二平面均垂直于所述主动轮的底端的切面,两个所述第一平面和两个所述第二平面围合的空间形成所述减振区域。
技术特征:
1.一种清洁机器人,其特征在于,包括:
2.根据权利要求1所述的清洁机器人,其特征在于,所述气泵(410)的重心位置和所述水泵(420)的重心位置均位于所述减振区域(500)内。
3.根据权利要求1所述的清洁机器人,其特征在于,所述泵组件(400)还包括包裹于所述气泵(410)的外表面的第一减振套(430)、及包裹于所述水泵(420)的外表面的第二减振套(440),所述第一减振套(430)及所述第二减振套(440)均安装于所述底座(100)上。
4.根据权利要求3所述的清洁机器人,其特征在于,所述清洁机器人(10)还包括用于清水箱缺水和水满检测的管路板组件(610),所述管路板组件(610)安装于所述水泵(420)的下方,并与水泵(420)对应连通。
5.根据权利要求4所述的清洁机器人,其特征在于,所述管路板组件(610)的顶部设有第一固定部(611),所述第二减振套(440)的底部设有第二固定部(441),所述第二固定部(441)与所述第一固定部(611)固定连接。
6.根据权利要求4所述的清洁机器人,其特征在于,所述气泵(410)位于所述管路板组件(610)的一侧,所述第一减振套(430)靠近所述管路板组件(610)的一侧设有第三固定部(431),所述第三固定部(431)固定于所述底座(100)上,所述管路板组件(610)靠近所述第一减振套(430)的一侧设有第四固定部(612),所述第四固定部(612)固定于所述第三固定部(431)上。
7.根据权利要求6所述的清洁机器人,其特征在于,所述第三固定部(431)设有第一安装孔(432),所述第四固定部(612)设有与所述第一安装孔(432)对应设置的第二安装孔(613),所述底座(100)设有第一螺柱(111),所述第一螺柱(111)穿过所述第一安装孔(432)并伸入所述第二安装孔(613)内,所述清洁机器人(10)还包括第一螺接件,所述第一螺接件与所述第一螺柱(111)螺纹连接,以将所述第三固定部(431)、所述第四固定部(612)及所述底座(100)固定为一体。
8.根据权利要求6所述的清洁机器人,其特征在于,所述第一减振套(430)远离所述管路板组件(610)的一侧还设有第五固定部(433),所述第五固定部(433)固定于所述底座(100)上;
9.根据权利要求1至8任一项所述的清洁机器人,其特征在于,所述底座(100)局部下凹以形成安装槽(120),所述安装槽(120)至少部分位于所述减振区域(500)内,所述泵组件(400)安装于所述安装槽(120)。
10.根据权利要求1至8任一项所述的清洁机器人,其特征在于,将两个所述主动轮(210)相对的内侧壁所在平面设置为第一平面,在沿所述底座(100)的前后方向上,将两个所述主动轮(210)的前端和后端的两切面设置为第二平面,所述第一平面及所述第二平面均垂直于所述主动轮(210)的底端的切面,两个所述第一平面和两个所述第二平面围合的空间形成所述减振区域(500)。
技术总结
本发明提供一种清洁机器人,包括底座、轮组件、减振结构及泵组件。其中,所述轮组件包括相对设置的两个主动轮,两个所述主动轮之间形成减振区域。所述减振结构设置于所述轮组件与所述底座之间,并用于对所述底座进行减振。所述泵组件包括安装于所述底座上的气泵和水泵,所述气泵的重心位置和所述水泵的重心位置中的至少一个位于所述减振区域内。本申请中的清洁机器人通过将气泵的重心位置和水泵的重心位置中的至少一个设置在两个主动轮之间的减振区域内,泵组件工作时产生的振动能够及时传递到减振结构上,利用主动轮与底座之间的减振结构吸收泵组件产生的振动,降低泵组件工作带来的振动以及噪音影响,提高用户体验感。
技术研发人员:冯煜湛,刘宇莹,林海利,谢瑞良,黄忠平,曾睿熙
受保护的技术使用者:珠海格力电器股份有限公司
技术研发日:
技术公布日:2025/1/13
- 还没有人留言评论。精彩留言会获得点赞!