一种水陆两栖低位侧抱式钢管桩振动沉拔设备的制作方法
1.本实用新型涉及管桩振动沉拔设备的技术领域,尤其是一种水陆两栖低位侧抱式钢管桩振动沉拔设备。
背景技术:
2.在工程施工中,钢管桩经常用于栈桥、钢平台、支架等的支撑桩。钢管桩插打拔除目前一般采用履带吊机配合振动锤进行施工,即钢管桩插打时,需设置钢管桩定位架或导向架,履带吊起吊钢管桩并安放在定位架或导向架内,并利用楔块将钢管桩临时固定,履带吊再起吊振动锤,并用振动锤夹持器夹紧管桩,然后缓慢松落吊机大钩,开启振动锤下沉钢管桩;钢管桩拔除时,履带吊起吊振动锤,夹持器夹紧管桩,开启振动锤让桩身振动1~2 min 使周围土壤液化后,利用履带吊提升振动锤进行拔桩。另外钢管桩在水中施工时,一般需设置钢栈桥利用履带吊配合振动锤采用钓鱼法进行钢管桩施工,部分深水区采用打桩船进行施工。
3.现有施工工艺可以看出在履带吊配合振动锤进行钢管桩插打时,工序步骤较多;浅水区打桩船无法进出时,必需设置栈桥配合进行施工;且在钢管桩顶部净空较小情况下,因履带吊吊具长度及振动锤高度问题,常规施工方式将无法完成拔桩作业。
4.因此,需要一种水陆两栖低位侧抱式钢管桩振动沉拔设备来解决上述问题。
技术实现要素:
5.本实用新型的目的是根据上述现有技术的不足,提供了一种水陆两栖低位侧抱式钢管桩振动沉拔设备,通过在移动走行机构上设置定位支撑结构,对移动走行机构进行定位和支撑,便于管桩的振动沉拔作业。
6.本实用新型目的实现由以下技术方案完成:
7.一种水陆两栖低位侧抱式钢管桩振动沉拔设备,用于管桩的振动沉拔作业,其特征在于:包括移动走行机构,所述移动走行机构上安装有定位支撑结构和机械伸缩臂式起吊装备,所述机械伸缩臂式起吊装备同侧抱式震动锤相连接;所述定位支撑结构包括支撑桩、液压动力系统以及转向系统,所述液压动力系统驱动所述支撑桩进行伸缩运动,所述转向系统驱动所述支撑桩进行转动。
8.所述支撑桩、所述液压动力系统和所述转向系统的数量均为四个,并且其三者均分别设于所述移动走行机构的四角上。
9.所述侧抱式震动锤同所述管桩相连接。
10.所述移动走行机构为水陆两栖履带式浮箱行走设备。
11.所述液压动力系统为液压马达或液压千斤顶。
12.本实用新型的优点是:采用水陆两栖履带式浮箱行走设备连接侧抱式震动锤,在水中管桩振动沉拔时不需设置便桥或大型浮运、起重设备辅助施工;同时也解决低净空钢管桩插打和拔除难题,从而降低工程造价,缩短施工工期。
附图说明
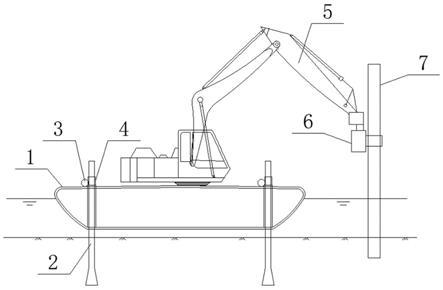
13.图1为本实用新型水陆两栖低位侧抱式钢管桩振动沉拔设备的结构示意图。
具体实施方式
14.以下结合附图通过实施例对本实用新型特征及其它相关特征作进一步详细说明,以便于同行业技术人员的理解:
15.如图1所示,图中标记1
‑
7分别表示为:水陆两栖履带式浮箱行走设备1,支撑桩2,液压动力系统3,转向系统4,机械伸缩臂式起吊装备5,侧抱式震动锤6,管桩7。
16.实施例:如图1所示,本实施例涉及一种水陆两栖低位侧抱式钢管桩振动沉拔设备,其主要包括移动走行机构、定位支撑结构、机械伸缩臂式起吊装备5以及侧抱式震动锤6。定位支撑结构和机械伸缩臂式起吊装备5均安装在移动走行机构上,机械伸缩臂式起吊装备5和侧抱式震动锤6相连接。操作人员可以通过操作机械伸缩臂式起吊装备5,使侧抱式振动锤6夹持于管桩7外侧,利用抱紧后与管桩7间摩擦力提供上拔或下插力,再开启侧抱式振动锤6,对管桩7进行振动沉拔作业。
17.如图1所示,本实施例中,定位支撑结构包括四个支撑桩2、四个液压动力系统3以及四个转向系统4,四个支撑桩2、四个液压动力系统3以及四个转向系统4均分别设于移动走行机构的四角上,每个支撑桩2、液压动力系统3和转向系统4分别形成一组定位支撑结构,对移动走行机构进行定位和支撑。其中,液压动力系统3可驱动支撑桩2进行伸缩运动,转向系统4可驱动支撑桩进行转动。具体地,当移动走行机构处于移动状态时,四个支撑桩2均处于水平方向,以保证移动走行机构的正常移动,而当移动走行机构移动至工作位时,四个转向系统4可分别驱动四个支撑桩2转向,即支撑桩2通过转动90
°
,由水平方向变为竖直方向,接着通过液压动力系统3驱动支撑桩2进行伸长,直至四个支撑桩2均固定好。当完成该处管桩作业后,再通过液压动力系统3驱动支撑桩2进行回缩,待四个支撑桩2回缩完毕后,通过转向系统4驱动支撑桩2转向90
°
,使支撑桩2由竖直方向变为水平方向。
18.本实施例中,移动走行机构选用水陆两栖履带式浮箱行走设备1,水陆两栖履带式浮箱行走设备1上设有履带和浮箱,使其可以在陆地走行,又能在浅水区走行,还能在深水区浮行。支撑桩2根据地质条件及沉拔力选择合适桩径及长度。液压动力系统3可选用液压马达或液压千斤顶。机械伸缩臂式起吊装备5可水平旋转,可上下移动,可前后伸缩并能提供上拔和下压力。另外,在钢管桩沉拔施工中,采用侧抱式振动锤6可以克服土体动侧摩阻,可有效减小钢管桩沉拔阻力。
19.如图1所示,本实施例还具有以下工作方法:
20.1、水陆两栖履带式浮箱行走设备1移动至合适的工位上;
21.2、通过液压动力系统3和转向系统4,转动并伸长支撑桩2,对水陆两栖履带式浮箱行走设备1进行定位和支撑;
22.3、操作机械伸缩臂式起吊装备5,使侧抱式振动锤6夹持于管桩7外侧;
23.4、开启侧抱式振动锤6,对管桩7进行振动沉拔作业;
24.5、完成作业后,使侧抱式振动锤6与管桩7分离,并回缩转动支撑桩2,使支撑桩2回位;
25.6、水陆两栖履带式浮箱行走设备1移动至下一工位。
26.虽然以上实施例已经参照附图对本实用新型目的的构思和实施例做了详细说明,但本领域普通技术人员可以认识到,在没有脱离权利要求限定范围的前提条件下,仍然可以对本实用新型作出各种改进和变换,故在此不一一赘述。
技术特征:
1.一种水陆两栖低位侧抱式钢管桩振动沉拔设备,用于管桩的振动沉拔作业,其特征在于:包括移动走行机构,所述移动走行机构上安装有定位支撑结构和机械伸缩臂式起吊装备,所述机械伸缩臂式起吊装备同侧抱式震动锤相连接;所述定位支撑结构包括支撑桩、液压动力系统以及转向系统,所述液压动力系统驱动所述支撑桩进行伸缩运动,所述转向系统驱动所述支撑桩进行转动。2.如权利要求1所述的一种水陆两栖低位侧抱式钢管桩振动沉拔设备,其特征在于:所述支撑桩、所述液压动力系统和所述转向系统的数量均为四个,并且其三者均分别设于所述移动走行机构的四角上。3.如权利要求1所述的一种水陆两栖低位侧抱式钢管桩振动沉拔设备,其特征在于:所述侧抱式震动锤同所述管桩相连接。4.如权利要求1所述的一种水陆两栖低位侧抱式钢管桩振动沉拔设备,其特征在于:所述移动走行机构为水陆两栖履带式浮箱行走设备。5.如权利要求1所述的一种水陆两栖低位侧抱式钢管桩振动沉拔设备,其特征在于:所述液压动力系统为液压马达或液压千斤顶。
技术总结
本实用新型公开了一种水陆两栖低位侧抱式钢管桩振动沉拔设备,用于管桩的振动沉拔作业,包括移动走行机构,所述移动走行机构上安装有定位支撑结构和机械伸缩臂式起吊装备,所述机械伸缩臂式起吊装备同侧抱式震动锤相连接;所述定位支撑结构包括支撑桩、液压动力系统以及转向系统,所述液压动力系统驱动所述支撑桩进行伸缩运动,所述转向系统驱动所述支撑桩进行转动。本实用新型的优点是:采用水陆两栖履带式浮箱行走设备连接侧抱式震动锤,在水中管桩振动沉拔时不需设置便桥或大型浮运、起重设备辅助施工;同时也解决低净空钢管桩插打和拔除难题,从而降低工程造价,缩短施工工期。缩短施工工期。缩短施工工期。
技术研发人员:曹振杰 黄昌富 许建付 李少华 姚铁军 赵中华
受保护的技术使用者:中铁十五局集团有限公司
技术研发日:2020.12.24
技术公布日:2021/9/7
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1