作业机械的控制系统的制作方法
本发明涉及基于监视作业机械的周围的监视装置的检测结果来控制作业机械的动作的作业机械的控制系统。
背景技术:
1、针对液压挖掘机等作业机械,以确保佩戴安全帽等在作业机械周围作业的人(周围作业者)的安全为目的,而具有当探测到人和障害物等时向操作员发出警告或使作业机械的动作停止的技术。关于后者,有时将防止作业机械与人接触的控制称为接触防止控制。
2、例如,在专利文献1中公开了一种监视系统,其具有安装于作业机械并拍摄周围的拍摄装置,其中,在该拍摄装置所拍摄的图像中进行人物以及保护设备的识别和特定,并计算离被特定的人物或者保护设备(例如安全帽)的接近距离,若该接近距离为第1距离以下则输出警告,若为比第1距离小的第2距离以下则输出警告且使作业机械的动作停止。
3、另外,专利文献1中还公开了在作业机械为旋转中和处于倾斜中的情况下将第1距离和第2距离扩大。还公开了:基于图像识别出的人的状况来变更第1距离和第2距离;和例如通过图像识别来特定人的朝向和活动并在判断为人趋向作业机械的情况下扩大第1距离和第2距离。
4、现有技术文献
5、专利文献
6、专利文献1:日本特开2019-157497号公报
技术实现思路
1、周围作业者能够分类为与作业机械一同进行协同作业的协同作业者、和没有与作业机械一同进行协同作业的非协同作业者。协同作业是指,作业机械和周围作业者为了同一目的而合作进行的作业。例如,周围作业者一边对液压挖掘机(操作员)指示一边进行安装对象物的位置的微调整的作业(安装作业)为协同作业。协同作业者根据其作业的性质,与非协同作业者相比接近作业机械进行作业的场景更多。
2、专利文献1的技术相对于佩戴安全帽等保护设备的人一律启动作业机械的动作限制(接触防止控制),没有将人区分为协同作业者和非协同作业者。因此,例如若以非协同作业者为基准来设定开始作业机械的动作限制(接触防止控制)的距离(第2距离),则协同作业者的移动可能范围会被限制为与非协同作业者同等。也就是说,在专利文献1中,协同作业者难以接近作业机械,具有协同作业的效率降低的隐患。相反地,若以协同作业者为基准进行设定,则非协同作业者的移动范围会被允许为与协同作业者同等,非协同作业者与作业机械接触的隐患变高。此外,专利文献1虽然公开了与通常时相比扩大由第1距离以及第2距离规定的警报区域以及停止区域,但并没有公开使其缩窄的点。
3、本发明的目的为,提供一种作业机械的控制系统,其即使在周围作业者中包括协同作业者的情况下,也能够抑制基于协同作业者进行的与作业机械的协同作业的效率降低。
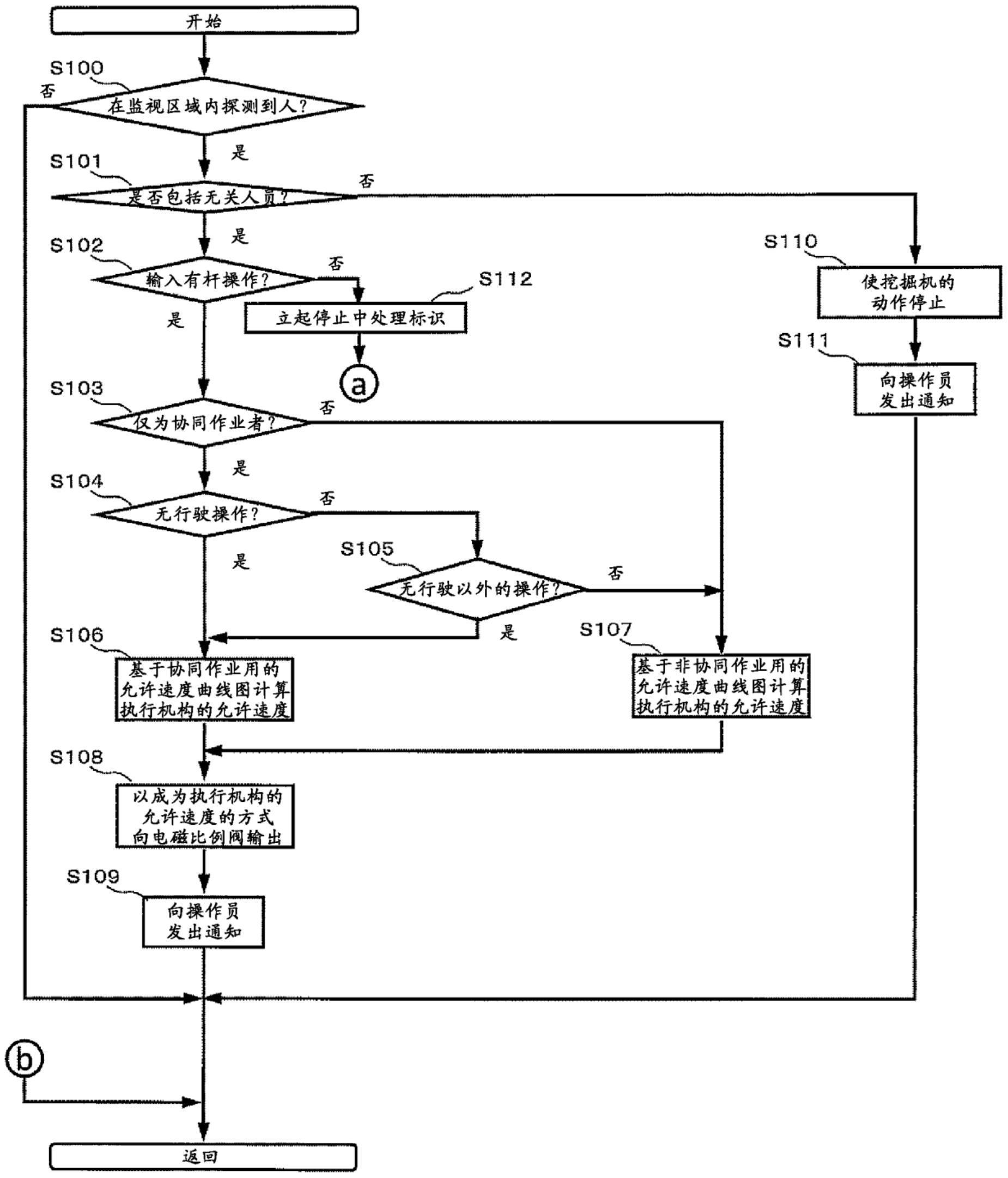
4、本申请包括解决上述课题的多个方式,若举出一例,则作业机械的控制系统具有:监视装置,其检测设定于作业机械的周围的规定区域内的人物的位置;和控制装置,其基于由所述监视装置检测到的人物即检测人物与所述作业机械之间的位置关系而生成限制所述作业机械的动作的控制信号,并基于该控制信号来控制所述作业机械,所述作业机械的控制系统的特征在于,所述监视装置还检测所述检测人物的动作,所述控制装置构成为:利用由所述监视装置检测到的与所述检测人物的动作有关的信息来判断所述检测人物是协同作业者和非协同作业者中的哪一个,基于所述检测人物是协同作业者和非协同作业者中的哪一个,或者基于所述检测人物是协同作业者和非协同作业者中的哪一个以及所述作业机械的动作来变更限制所述作业机械的动作时的所述作业机械的允许速度。
5、发明效果
6、根据本发明,即使在周围作业者中包括协同作业者的情况下,也能够抑制基于协同作业者进行的与作业机械的协同作业的效率降低。
技术特征:
1.一种作业机械的控制系统,具有:
2.根据权利要求1所述的作业机械的控制系统,其特征在于,
3.根据权利要求2所述的作业机械的控制系统,其特征在于,
4.根据权利要求2所述的作业机械的控制系统,其特征在于,
5.根据权利要求2所述的作业机械的控制系统,其特征在于,
6.根据权利要求2所述的作业机械的控制系统,其特征在于,
7.根据权利要求2所述的作业机械的控制系统,其特征在于,
8.根据权利要求2所述的作业机械的控制系统,其特征在于,
9.根据权利要求2所述的作业机械的控制系统,其特征在于,
10.根据权利要求2所述的作业机械的控制系统,其特征在于,
11.根据权利要求2所述的作业机械的控制系统,其特征在于,
12.根据权利要求3所述的作业机械的控制系统,其特征在于,
13.根据权利要求3所述的作业机械的控制系统,其特征在于,
技术总结
作业机械的控制系统具有:监视装置,其检测设定于作业机械的周围的监视区域内的人物的位置和动作;和控制器,其基于由监视装置检测到的检测人物与液压挖掘机之间的位置关系而生成限制液压挖掘机的动作的控制信号,并基于该控制信号来控制液压挖掘机。控制器基于检测人物的动作来判断检测人物是协同作业者和非协同作业者中的哪一个,基于该判断结果,或者基于该判断结果以及作业机械的动作来变更限制作业机械的动作时的作业机械的允许速度。
技术研发人员:成川理优,森木秀一,井村进也,山本慎二郎
受保护的技术使用者:日立建机株式会社
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!