无人作业机械的制作方法
本发明涉及无人作业机械。
背景技术:
1、近年来,在液压挖掘机等作业机械中,不断推进不搭乘操作者就能够进行作业的无人作业机械的开发(例如,专利文献1)。
2、在专利文献1中,记载了一种无人挖掘用的系统,尤其是用于利用无人挖掘机械实施挖掘及装载作业的系统。
3、现有技术文献
4、专利文献
5、专利文献1:日本特开2000-136549号公报
技术实现思路
1、在实际的挖掘作业及装载作业的作业现场中,液压挖掘机等挖掘机械与自卸卡车等搬运机械协作,进行挖掘作业及装载作业。尤其是,在搬运机械朝向能够装载挖掘物的规定位置进入的情况下,在搬运机械在挖掘机械的装载作业后从该规定位置退出的情况下,挖掘机械与搬运机械的协作不可欠缺。在挖掘机械与作业机械无协作的情况下,会产生搬运机械无法在恰当的位置停车的状况、搬运机械无法在最佳时机开始搬运作业的状况。
2、在专利文献1中,提及了进行挖掘作业及装载作业的挖掘机械基于其周边环境信息计划该作业并自主执行,但没有提及与装载挖掘物的搬运机械之间的协作。尤其是,在专利文献1中,丝毫没有设想挖掘机械和搬运机械中的一方为有人作业机械且另一方为无人作业机械的情况。
3、本发明是鉴于上述情况而做出的,其目的在于提供一种能够可靠地与有人作业机械协作并能够顺利地执行作业的无人作业机械。
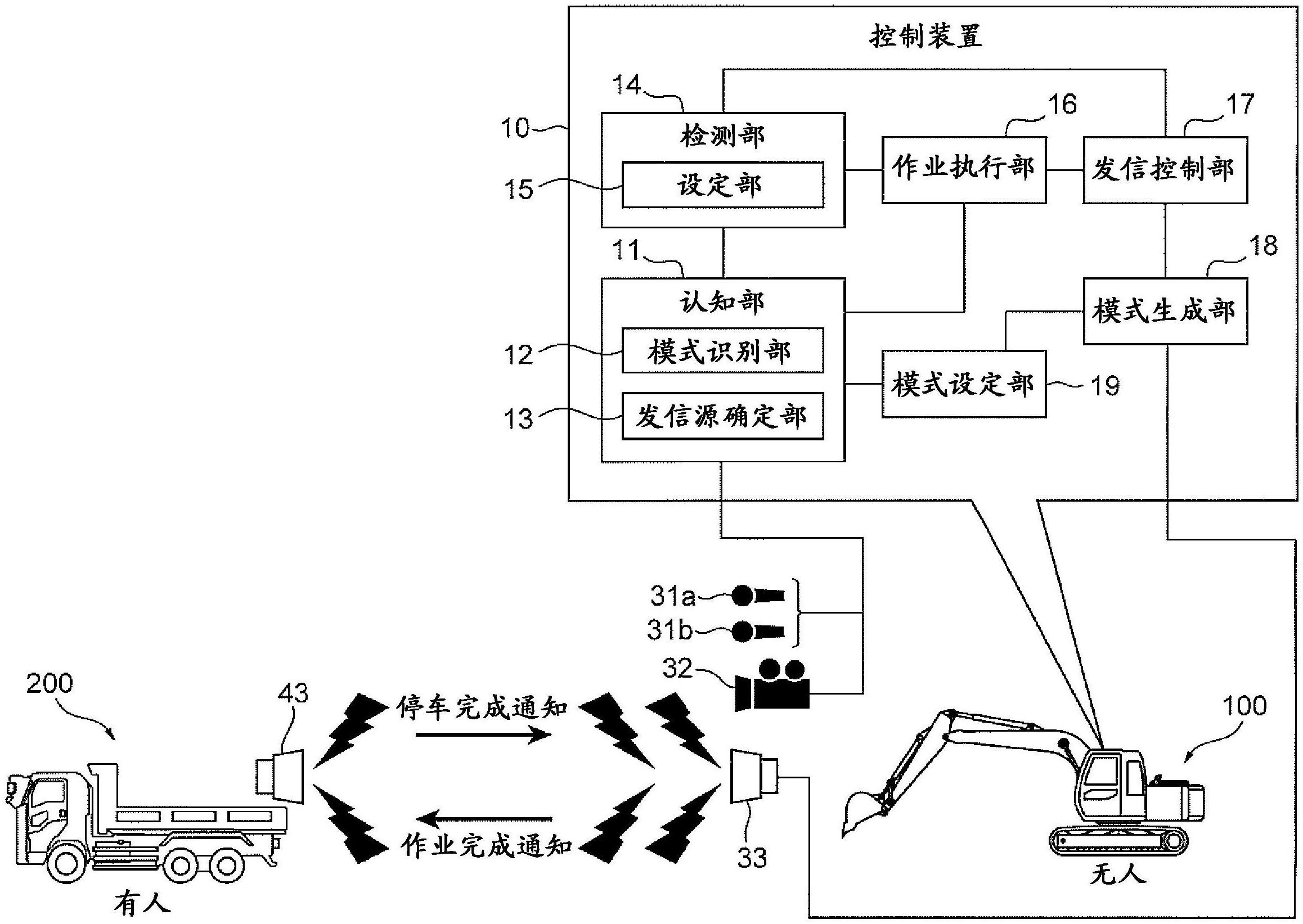
4、为了解决上述课题,本发明的无人作业机械是能够与有人作业机械协作而进行作业的无人作业机械,其特征在于,具备:接收装置,其接收通过搭乘于上述有人作业机械的操作者的操作而从上述有人作业机械发出的、与上述有人作业机械的动作状态或向上述无人作业机械的动作指示有关的通知;和控制装置,其基于由上述接收装置接收到的上述通知,控制上述无人作业机械的动作。
5、发明效果
6、本发明的无人作业机械能够可靠地与有人作业机械协作,能够顺利地执行作业。
7、上述以外的课题、结构及效果,通过以下实施方式的说明得以明确。
技术特征:
1.一种无人作业机械,能够与有人作业机械协作而进行作业,其特征在于,具备:
2.根据权利要求1所述的无人作业机械,其特征在于,
3.根据权利要求2所述的无人作业机械,其特征在于,
4.根据权利要求2所述的无人作业机械,其特征在于,
5.根据权利要求3所述的无人作业机械,其特征在于,
6.根据权利要求2所述的无人作业机械,其特征在于,
7.根据权利要求3所述的无人作业机械,其特征在于,
8.根据权利要求3所述的无人作业机械,其特征在于,
9.根据权利要求4所述的无人作业机械,其特征在于,
10.根据权利要求1所述的无人作业机械,其特征在于,
11.根据权利要求10所述的无人作业机械,其特征在于,
12.根据权利要求10所述的无人作业机械,其特征在于,
13.根据权利要求11所述的无人作业机械,其特征在于,
14.根据权利要求10所述的无人作业机械,其特征在于,
15.根据权利要求11所述的无人作业机械,其特征在于,
16.根据权利要求11所述的无人作业机械,其特征在于,
17.根据权利要求12所述的无人作业机械,其特征在于,
18.根据权利要求8或16所述的无人作业机械,其特征在于,
19.根据权利要求8或16所述的无人作业机械,其特征在于,
技术总结
本发明提供一种能够可靠地与有人作业机械协作而能够顺利地执行作业的无人作业机械。挖掘机械(100)是能够与作为有人作业机械的搬运机械(200)协作而进行作业的无人作业机械。挖掘机械(100)的特征在于,具备:作为接收装置的集音装置(31a、31b),其接收通过搭乘于搬运机械(200)的操作者的操作而从搬运机械(200)发出的、与搬运机械(200)的动作状态或向挖掘机械(100)的动作指示有关的通知;和控制装置(10),其基于接收到的通知,控制挖掘机械(100)的动作。
技术研发人员:清水自由理,斋藤哲平,井村进也
受保护的技术使用者:日立建机株式会社
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!