一种水下智能建造机器人
本发明涉及水下建造,尤其涉及一种水下智能建造机器人。
背景技术:
1、随着陆地资源紧缺,水下建造的重要性日益凸显。在进行沿海与近海水下桥墩、围填海、海底隧道工程、驱波块、礁石块和海底管道等水下建筑施工及维护时,水下施工作业难度大、安全风险大,施工效率低,特别是需要人工水下的作业,受到水深压力的限制,作业困难,劳动强度大,无法保证水下施工人员的安全。
2、目前的水下施工的工艺主要为围堰法,需要在施工位置修建围堰,通过止水结构或建筑把周围的水与围堰外面的水隔绝开,之后利用抽水机等设备把围堰内的水抽干,然后进行建造施工,施工完成后拆除围堰,让建筑周围水域恢复原样。此种施工方法需要用到挖掘机、冲击钻、抽水机等大型设备,设备在水中运行时存在困难,整体工程量大,前期辅助工期长,并且随着施工深度的加深,围堰的建造难度也在逐渐增大。水下建造施工困难、施工效率低、安全风险大。目前,没有能够在水下实现3d打印的建造设备,本发明提供的水下建造机器人可以有效解决上述问题。
技术实现思路
1、本发明主要解决现有技术的水下建造设备水下建造施工困难、施工效率低、安全风险大等技术问题,提出一种水下智能建造机器人,适用于水下混凝土3d打印的智能建造,为水下作业施工提供安全保障,实现无人作业的智能建造。
2、本发明提供了一种水下智能建造机器人,包括:机架以及安装在机架上的密封舱、动力机构、3d打印机构;
3、所述密封舱内设置主控板和与主控板电连接的推进器驱动模块;所述密封舱的前端设置云台摄像头,所述云台摄像头上密封罩设透明半球罩;所述云台摄像头与主控板电连接;
4、所述动力机构,包括:一个x轴方向推进器、四个y轴方向推进器和两个z轴方向推进器;
5、所述x轴方向推进器置在机架底部,两个z轴方向推进器设置在机架的两侧;四个y轴方向推进器设置在机架的两侧前后,且所述y轴方向推进器位于z轴方向推进器的上方;
6、所述x轴方向推进器、y轴方向推进器和z轴方向推进器分别与推进器驱动模块电连接;
7、所述3d打印机构,包括:料仓、泵、防水电机、喷嘴和螺杆;所述料仓、泵分别安装在机架上,所述防水电机安装在喷嘴上;所述料仓的出口与泵的入口连通,所述泵的出口与喷嘴的入口连通;所述喷嘴内设置螺杆,所述螺杆的输入端与防水电机的输出轴连接;所述泵、防水电机与主控板电连接。
8、优选的,所述机架,包括:主固定板、打印机构安装板、泵体支撑板、料仓支撑件、泵体支撑板连接件和两个舱体连接件;
9、所述主固定板的前端底面设置打印机构安装板,所述主固定板的后端底面设置泵体支撑板;所述泵体支撑板与主固定板通过泵体支撑板连接件进行连接;
10、所述泵体支撑板上设置料仓支撑件;
11、两个舱体连接件设置在主固定板的两端。
12、优选的,所述密封舱设置在舱体连接件上;
13、所述3d打印机构设置在打印机构安装板上;
14、所述料仓设置在料仓支撑件上;
15、所述泵设置在泵体支撑板上;
16、所述x轴方向推进器设置在主固定板底面,所述y轴方向推进器设置在舱体连接件上,所述z轴方向推进器设置在主固定板上。
17、优选的,所述机架上设置多个浮力舱。
18、优选的,所述密封舱内设置支架,所述主控板和推进器驱动模块安装在支架上。
19、优选的,所述密封舱尾端设置多个穿线螺母;
20、防水线缆穿过穿线螺母为主控板和推进器驱动模块提供电源,穿线螺母与防水线缆之间的空隙浇灌防水胶。
21、优选的,所述防水电机上密封罩设电机密封罩。
22、优选的,所述螺杆的输入端通过联轴器与防水电机的输出轴连接;
23、所述防水电机安装在喷嘴密封盖上,所述防水电机的输出轴穿过喷嘴密封盖并连接在联轴器上端;
24、所述喷嘴密封盖安装在喷嘴上,所述喷嘴密封盖与喷嘴内壁接触部分设有橡胶垫和密封圈。
25、优选的,所述喷嘴的出口设置防水装置。
26、优选的,所述防水装置,包括:舵机、支撑架和转盘;
27、所述支撑架安装在喷嘴的出口,所述支撑架开设圆孔通孔,且支撑架内设置转盘;
28、所述支撑架上设置舵机,所述舵机的输出轴与转盘连接。
29、本发明提供的一种水下智能建造机器人,与现有技术相比具有以下优点:
30、1、本发明水下智能建造机器人,动力机构能够提供机器人水下运动的动力,3d打印机构实现水下3d打印,能够完成水下建造作业,降低水下人工作业的危险系数,提高水下建造效率;水下机器人通过有缆方式控制,保证视频信号从云台摄像头采集视频给机器人控制终端,避免出现信号中断,保证水下机器人的正常运转。本发明在海底隧道工程、海底管道工程及水下建筑设施的海洋工程等领域,具有较好应用前景。
31、2、通过不同角度和方向安装的动力模块,有效的控制水下机器人的移动,实现水泥浆体在xyz轴三个方向的挤出打印,完成空间造型的建造。推进器桨叶罩对螺旋桨进行保护,避免与水下的垃圾、水草等发生缠绕。
32、3.主控板、云台摄像头、推进器驱动安装在密封舱内,避免与水接触发生短路。云台摄像头传输水下的实时工况,便于监控机器人的运作,并且摄像头可进行空间任意角度旋转,扩大监测视角和范围。
33、4、喷嘴入口、泵送管道、泵体和料仓之间均密封连接,保证打印系统不渗水,避免破坏浆料。
技术特征:
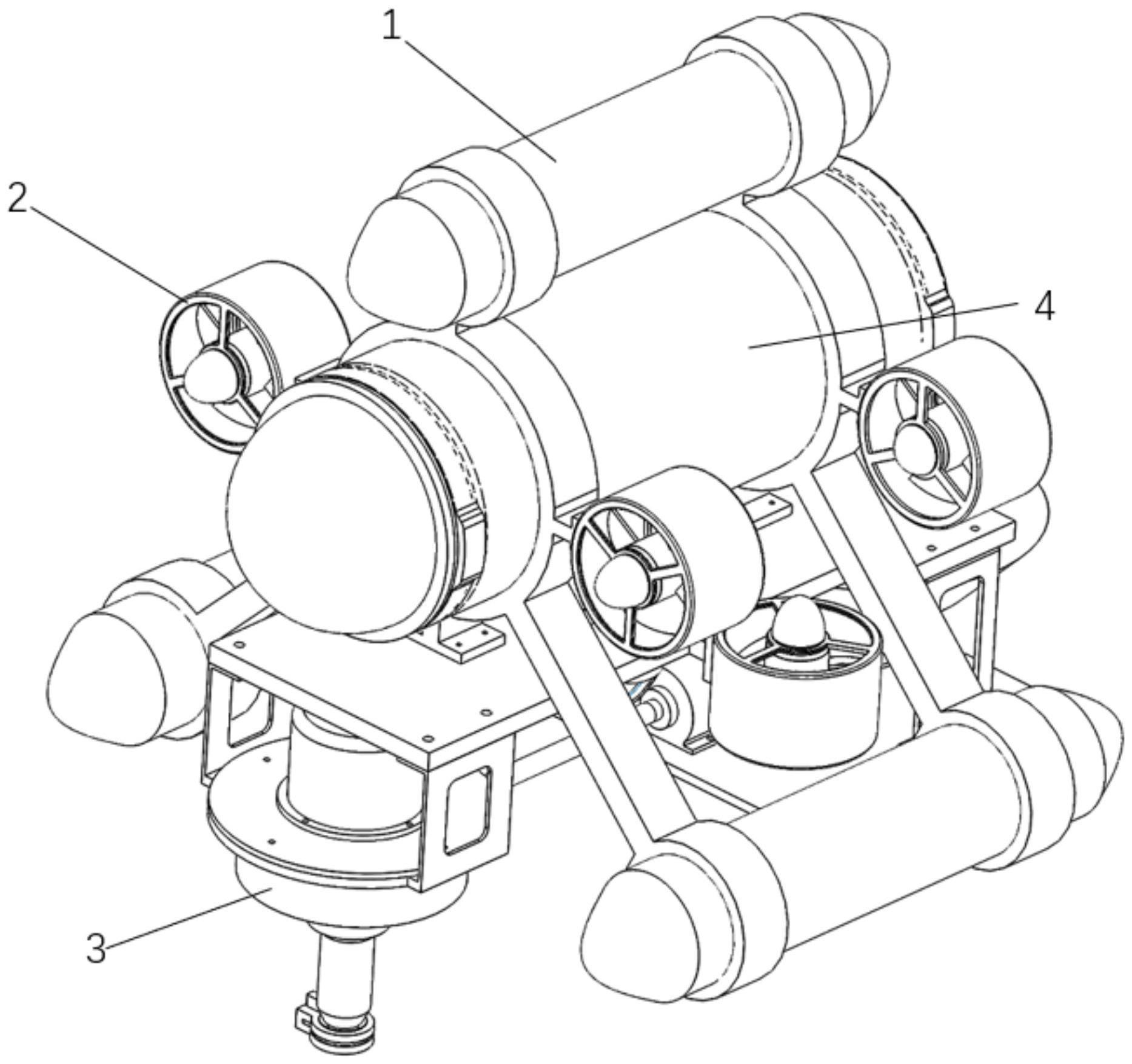
1.一种水下智能建造机器人,其特征在于,包括:机架以及安装在机架上的密封舱(4)、动力机构(2)、3d打印机构(3);
2.根据权利要求1所述的水下智能建造机器人,其特征在于,所述机架,包括:主固定板(6)、打印机构安装板(7)、泵体支撑板(8)、料仓支撑件(9)、泵体支撑板连接件(10)和两个舱体连接件(5);
3.根据权利要求2所述的水下智能建造机器人,其特征在于,所述密封舱(4)设置在舱体连接件(5)上;
4.根据权利要求1或2所述的水下智能建造机器人,其特征在于,所述机架上设置多个浮力舱(1)。
5.根据权利要求1所述的水下智能建造机器人,其特征在于,所述密封舱(4)内设置支架(32),所述主控板(29)和推进器驱动模块(34)安装在支架(32)上。
6.根据权利要求1或5所述的水下智能建造机器人,其特征在于,所述密封舱(4)尾端设置多个穿线螺母(33);
7.根据权利要求1所述的水下智能建造机器人,其特征在于,所述防水电机(19)上密封罩设电机密封罩(18)。
8.根据权利要求7所述的水下智能建造机器人,其特征在于,所述螺杆(21)的输入端通过联轴器(24)与防水电机(19)的输出轴连接;
9.根据权利要求1所述的水下智能建造机器人,其特征在于,所述喷嘴(23)的出口设置防水装置(22)。
10.根据权利要求9所述的水下智能建造机器人,其特征在于,所述防水装置(22),包括:舵机(35)、支撑架(36)和转盘(37);
技术总结
本发明涉及水下建造技术领域,提供一种水下智能建造机器人,包括:机架以及安装在机架上的密封舱、动力机构、3D打印机构;所述密封舱内设置主控板和与主控板电连接的推进器驱动模块;所述密封舱的前端设置云台摄像头,所述云台摄像头上密封罩设透明半球罩;所述云台摄像头与主控板电连接;所述3D打印机构,包括:料仓、泵、防水电机、喷嘴和螺杆;所述料仓、泵分别安装在机架上,所述防水电机安装在喷嘴上;所述料仓的出口与泵的入口连通,所述泵的出口与喷嘴的入口连通;所述喷嘴内设置螺杆,所述螺杆的输入端与防水电机的输出轴连接;所述泵、防水电机与主控板电连接。本发明能够为水下作业施工提供安全保障,实现无人作业的智能建造。
技术研发人员:杨昆,杨帆,王益博,李煜,任常在
受保护的技术使用者:辽宁工业大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!