一种工业水体清理机器人的制作方法
本技术涉及工业水体清理领域,具体而言,涉及一种工业水体清理机器人。
背景技术:
1、工业水体清理用的沉淀池是应用沉淀作用去除水中悬浮物的一种构筑物,净化水质的设备。利用水的自然沉淀或混凝沉淀的作用来除去水中的悬浮物。由于沉淀池自身的功能特点,其工作一段时间会自然产生大量的淤积。因此,沉淀池清淤工作必须定期进行,清淤可有效的提高沉淀效果,增加沉淀池的有效容积,提高废水回用效率。目前主要的清淤手段是人工或通过机械设备辅助的方式进行,这种传统的清淤方式,必须在停工停产的状态下进行,通常清淤时间长,效率低,严重影响生产的正常进行。而且在清淤过程中常会伴有有害气体的释放,因此经常发生人身伤亡事故,不便于在不停工不停产的情况下,进行沉淀池内淤泥清理。
技术实现思路
1、为了弥补以上不足,本实用新型提供了一种工业水体清理机器人,旨在改善相关技术中工业水体清理用的沉淀池中淤泥不便于在不停工不停产的情况下,进行清理的问题。
2、本实用新型是这样实现的:
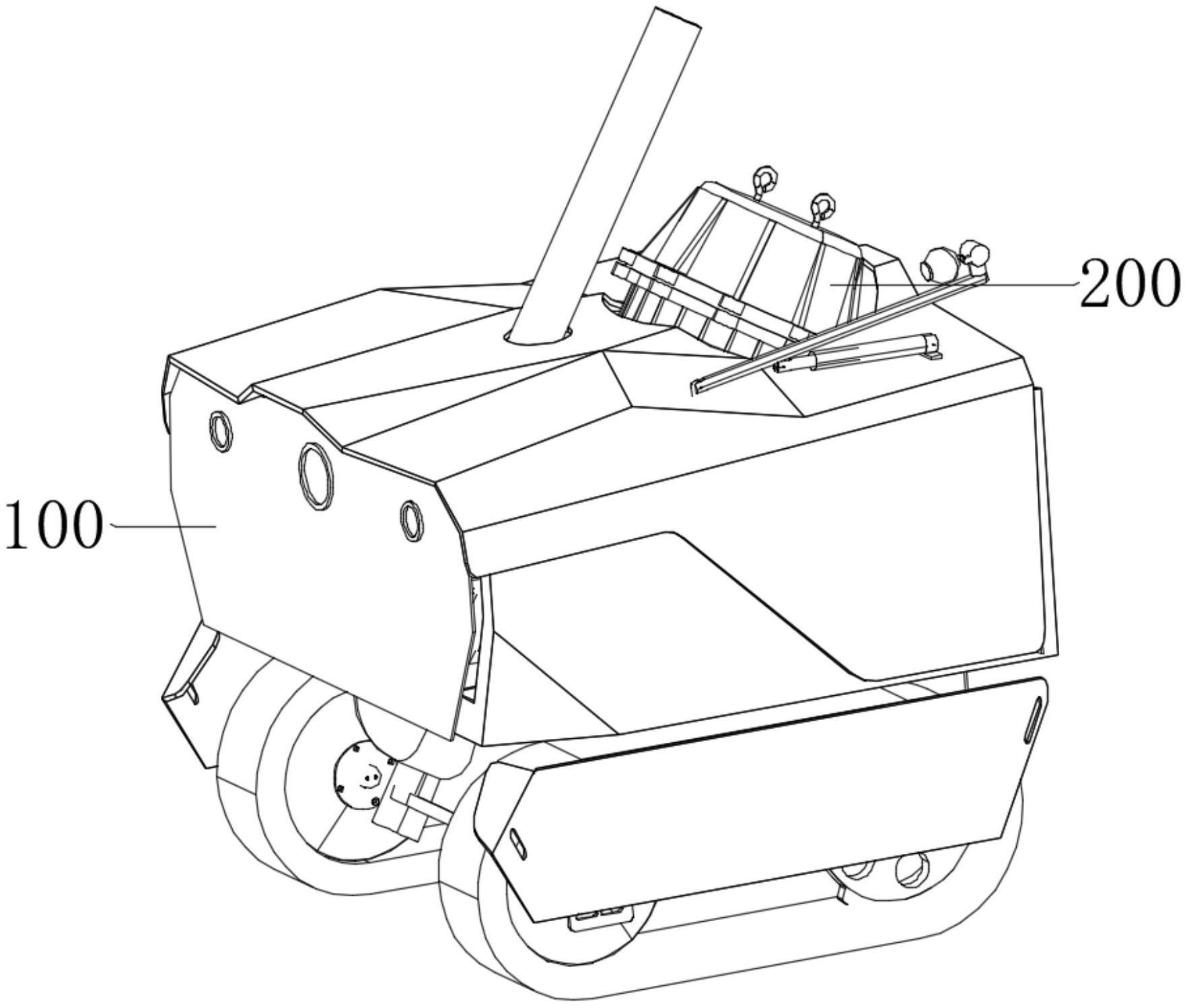
3、一种工业水体清理机器人包括水下机器人组件和清淤组件。
4、所述清淤组件包括绞吸泵件和淤泥打散件,所述绞吸泵件固定插接于所述水下机器人组件内部,所述绞吸泵件下部的吸水口位于底端,所述淤泥打散件固定连接于所述水下机器人组件内部,所述淤泥打散件输出端位于所述水下机器人组件底端。
5、在一种具体的实施方案中,所述水下机器人组件包括水下机器人件和固定摄像模块,所述固定摄像模块固定连接于所述水下机器人件的前端。
6、在一种具体的实施方案中,所述水下机器人件前端设置有补光灯,所述补光灯位于所述固定摄像模块两侧。
7、在一种具体的实施方案中,所述水下机器人件包括机器人本体和履带,所述履带设置于所述机器人本体下部,所述履带被构造成传动连接于所述机器人本体。
8、在一种具体的实施方案中,所述机器人本体两侧设置有挡泥板,所述挡泥板挡住所述履带外侧。
9、在一种具体的实施方案中,所述水下机器人件顶端设置有升降式云台摄像机。
10、在一种具体的实施方案中,所述升降式云台摄像机包括摆杆、驱动杆和云台摄像机本体,所述摆杆铰接于所述水下机器人件顶端,所述驱动杆一端铰接于所述水下机器人件顶端,所述驱动杆另一端铰接于所述摆杆,所述云台摄像机本体设置于所述摆杆顶端。
11、在一种具体的实施方案中,所述绞吸泵件包括绞吸泵、排污管和支撑架,所述排污管连通于所述绞吸泵,所述支撑架固定连接于所述水下机器人件内部,所述绞吸泵插接于所述水下机器人件内并固定连接于所述支撑架上。
12、在一种具体的实施方案中,所述支撑架包括支撑板和连接杆,所述连接杆等间隔设置于所述支撑板上侧,所述连接杆穿过所述绞吸泵下端后通过螺母压紧。
13、在一种具体的实施方案中,所述淤泥打散件包括潜水喷泵和高压喷水管,所述高压喷水管固定连通于所述潜水喷泵,所述高压喷水管朝向所述水下机器人件底部。
14、本申请的有益效果是:使用时,将水下机器人组件和清淤组件放入沉淀池内,启动绞吸泵件和淤泥打散件,每个车体可以配置多台淤泥打散件,通过淤泥打散件喷出的高压水将沉淀的淤泥冲散,再通过绞吸泵件将打散后的淤泥连通水一起排至岸上的泥水分离设备进行分离,淤泥清理的过程中,由工业水体清理机器人完成,减少停工和停产的情况,进而有效改善相关技术中工业水体清理用的沉淀池中淤泥不便于在不停工不停产的情况下,进行清理的问题,也减少清淤过程中的有害气体释放,造成人身伤亡事故的情况。
技术特征:
1.一种工业水体清理机器人,其特征在于,包括
2.根据权利要求1所述的一种工业水体清理机器人,其特征在于,所述水下机器人组件(100)包括水下机器人件(110)和固定摄像模块(120),所述固定摄像模块(120)固定连接于所述水下机器人件(110)的前端。
3.根据权利要求2所述的一种工业水体清理机器人,其特征在于,所述水下机器人件(110)前端设置有补光灯(130),所述补光灯(130)位于所述固定摄像模块(120)两侧。
4.根据权利要求2所述的一种工业水体清理机器人,其特征在于,所述水下机器人件(110)包括机器人本体(111)和履带(112),所述履带(112)设置于所述机器人本体(111)下部,所述履带(112)被构造成传动连接于所述机器人本体(111)。
5.根据权利要求4所述的一种工业水体清理机器人,其特征在于,所述机器人本体(111)两侧设置有挡泥板(113),所述挡泥板(113)挡住所述履带(112)外侧。
6.根据权利要求2所述的一种工业水体清理机器人,其特征在于,所述水下机器人件(110)顶端设置有升降式云台摄像机(140)。
7.根据权利要求6所述的一种工业水体清理机器人,其特征在于,所述升降式云台摄像机(140)包括摆杆(141)、驱动杆(142)和云台摄像机本体(143),所述摆杆(141)铰接于所述水下机器人件(110)顶端,所述驱动杆(142)一端铰接于所述水下机器人件(110)顶端,所述驱动杆(142)另一端铰接于所述摆杆(141),所述云台摄像机本体(143)设置于所述摆杆(141)顶端。
8.根据权利要求2所述的一种工业水体清理机器人,其特征在于,所述绞吸泵件(210)包括绞吸泵(211)、排污管(212)和支撑架(213),所述排污管(212)连通于所述绞吸泵(211),所述支撑架(213)固定连接于所述水下机器人件(110)内部,所述绞吸泵(211)插接于所述水下机器人件(110)内并固定连接于所述支撑架(213)上。
9.根据权利要求8所述的一种工业水体清理机器人,其特征在于,所述支撑架(213)包括支撑板(2131)和连接杆(2132),所述连接杆(2132)等间隔设置于所述支撑板(2131)上侧,所述连接杆(2132)穿过所述绞吸泵(211)下端后通过螺母压紧。
10.根据权利要求2所述的一种工业水体清理机器人,其特征在于,所述淤泥打散件(220)包括潜水喷泵(221)和高压喷水管(222),所述高压喷水管(222)固定连通于所述潜水喷泵(221),所述高压喷水管(222)朝向所述水下机器人件(110)底部。
技术总结
本技术提供了一种工业水体清理机器人,属于工业水体清理技术领域。该工业水体清理机器人包括水下机器人组件和清淤组件。使用时,将水下机器人组件和清淤组件放入沉淀池内,启动绞吸泵件和淤泥打散件,每个车体可以配置多台淤泥打散件,通过淤泥打散件喷出的高压水将沉淀的淤泥冲散,再通过绞吸泵件将打散后的淤泥连通水一起排至岸上的泥水分离设备进行分离,淤泥清理的过程中,由工业水体清理机器人完成,减少停工和停产的情况,进而有效改善相关技术中工业水体清理用的沉淀池中淤泥不便于在不停工不停产的情况下,进行清理的问题,也减少清淤过程中的有害气体释放,造成人身伤亡事故的情况。
技术研发人员:侯鹏,徐岷,许一峰
受保护的技术使用者:深圳潜水侠创新动力科技有限公司
技术研发日:20220523
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!