建筑工程技术的地基智能自动化平整设备的制作方法
背景技术:
1、在建筑工程施工之前需要先打基地,比如农村的平方以及城里的楼房,地基打的好不好取决与房屋的稳定性,因此地基特别重要,地基首先铺设一层土壤,由于铺设的土壤凹凸不平,因此需要借助平整设备对地基进行平整,为了更方便的对地基进行平整,需要提供智能自动化平整设备对地基平整。
2、现有的地基平整装置需要人工手动操控对地基平整,不仅增加了人力与物资,同时在手动操作不便的情况下无法对地基平整,在平整过程中,压平滚子上会粘附有泥土,泥土不仅增加了整体移动的阻力,粘附的泥土还是得整体跳动,影响平整装置的稳定性,平整装置的耙子在推动过程中对堆积泥土与杂质,因此需要人工手动对耙子进行清理,降低了地基平整的效率。
技术实现思路
1、为了解决上述技术问题,本发明提供建筑工程技术的地基智能自动化平整设备,以解决现有的地基平整装置需要人工手动操控对地基平整,压平滚子上会粘附有泥土,平整装置的耙子在推动过程中对堆积泥土与杂质的问题。
2、本发明用于建筑工程技术的地基智能自动化平整设备的目的与功效,由以下具体技术手段所达成:
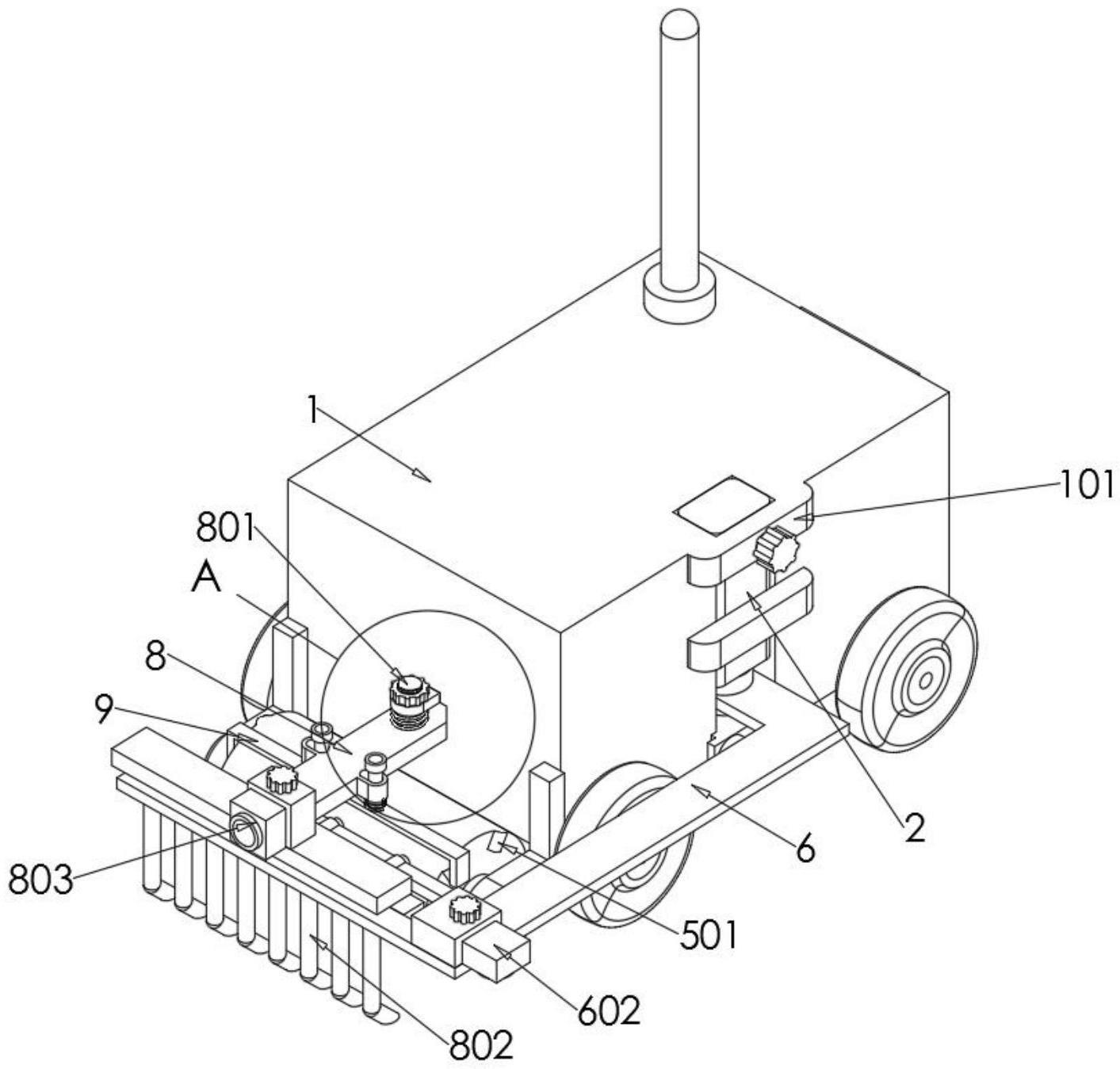
3、建筑工程技术的地基智能自动化平整设备,包括控制机体;
4、所述控制机体的底部安装有滚轮;推动气缸,所述推动气缸安装在控制机体的内侧;
5、第一支撑板,所述第一支撑板的上方有一个转动套筒,推动气缸的推动杆底部安装在转动套筒内,第一支撑板安装在推动气缸的推动杆底部;
6、驱动机构,所述驱动机构安装在第一支撑板的上方;
7、压平滚子,所述压平滚子安装在控制机体的外侧;
8、第一刮除板,所述第一刮除板内侧有一个第二支撑板,第一刮除板的角落处安装有一个红外传感器,第一刮除板开设一个安装孔,第一刮除板通过安装孔安装在推动气缸的推动杆外侧;
9、第二刮除板,所述第二刮除板安装在第一刮除板的外侧;
10、第三支撑板,所述第三支撑板安装在控制机体的外侧;
11、清扫板,所述清扫板安装在第三支撑板的底部。
12、进一步的,所述控制机体开设有一个安装槽,推动气缸安装在控制机体的安装槽内,控制机体的安装槽外侧有两个锁定块,锁定块安装有一个锁紧螺栓。
13、进一步的,第一支撑板的底部有均匀分布的加固块,加固块为圆锥结构。
14、进一步的,所述控制机体的底部开设有一个隐藏槽,第一支撑板卡接在控制机体的隐藏槽内。
15、进一步的,所述驱动机构由电动马达、蜗杆和涡轮共同组成,第一支撑板的上方有一个保护罩,保护罩的外侧有一个定位套筒,电动马达安装在保护罩的定位套筒内,第一支撑板的保护罩内安装有一个蜗杆,蜗杆与电动马达的驱动轴相连接,推动气缸的推动杆外侧安装有一个涡轮,蜗杆和涡轮相啮合。
16、进一步的,所述压平滚子的两个侧面均设有呈环形阵列状分布的挤压块,两侧面的挤压块相互交错,挤压块为圆弧结构,挤压块与第一刮除板的内侧相接触。
17、进一步的,所述第一刮除板和第二刮除板上均开设有相对正的刮除槽,第一刮除板和第二刮除板合并后刮除槽形成圆柱结构,第二刮除板的外侧有两个第一定位杆,第一定位杆为圆柱结构,第二支撑板开设有两个滑动孔,第一定位杆穿插于第二支撑板的滑动孔内,第一定位杆的外侧套接有一个第一支撑弹簧。
18、进一步的,所述第三支撑板的上方有一个第二定位杆,第二定位杆的外侧套接有一个第二支撑弹簧,控制机体开设有一个定位槽,第三支撑板的端部卡接在控制机体的定位槽内,第三支撑板的底部有均匀分布的拨动杆,第三支撑板的上方安装有一个距离传感器。
19、进一步的,所述清扫板的底部有清扫凸起,清扫凸起与压平滚子相接触,清扫板的上方有两个第三定位杆,第三定位杆的外侧套接有一个第三支撑弹簧,第三支撑板的外侧有两个定位孔,第三定位杆穿插于第三支撑板的定位孔内。
20、与现有技术相比,本发明具有如下有益效果:
21、1,通过推动气缸和第一支撑板将整体进行托举,通过驱动机构驱动整体转动进行角度调节,解决了整体提调节角度需要人工操控的问题,从而提高了地基平整的效率。
22、2,通过红外传感器和石灰线相配合对整体的移动位置定位,从而使整体能够沿着石灰线行走,一个是对整体的移动路线进行规划,另一个是避免了整体自动行走是位置偏移的现象,距离传感器使得整体在靠近障碍物时自动停止,在整体停止移动后,推动气缸将第一支撑板向下推动对主体托举,因此实现了地基的智能化自动平整与转向。
23、3,通过拨动杆将凹凸不平的地基推平,通过压平滚子对地基压平,将第一刮除板和推动气缸相结合,推动气缸在推动第一支撑板的过程中同时带动第一刮除板移动,通过第一刮除板和第二刮除板相配合对拨动杆自动清扫,解决了拨动杆需要人工手动清除的问题。
24、4,通过清扫板的设置,在压平滚子转动时,清扫板配合清扫凸起将压平滚子外侧的泥土擦除,通过挤压块的设置对清扫板往复挤压,实现了清扫板的往复移动,使得清扫凸起更好的对压平滚子外侧的泥土擦除,解决了泥土粘附在压平滚子上增大转动阻力。
技术特征:
1.建筑工程技术的地基智能自动化平整设备,其特征在于:包括控制机体(1);
2.如权利要求1所述建筑工程技术的地基智能自动化平整设备,其特征在于:所述控制机体(1)开设有一个安装槽,推动气缸(2)安装在控制机体(1)的安装槽内,控制机体(1)的安装槽外侧有两个锁定块(101),锁定块(101)安装有一个锁紧螺栓。
3.如权利要求1所述建筑工程技术的地基智能自动化平整设备,其特征在于:第一支撑板(3)的底部有均匀分布的加固块。
4.如权利要求1所述建筑工程技术的地基智能自动化平整设备,其特征在于:所述控制机体(1)的底部开设有一个隐藏槽,第一支撑板(3)卡接在控制机体(1)的隐藏槽内。
5.如权利要求1所述建筑工程技术的地基智能自动化平整设备,其特征在于:所述驱动机构(4)由电动马达(401)、蜗杆(402)和涡轮(403)共同组成,第一支撑板(3)的上方有一个保护罩,保护罩的外侧有一个定位套筒,电动马达(401)安装在保护罩的定位套筒内,第一支撑板(3)的保护罩内安装有一个蜗杆(402),蜗杆(402)与电动马达(401)的驱动轴相连接,推动气缸(2)的推动杆外侧安装有一个涡轮(403),蜗杆(402)和涡轮(403)相啮合。
6.如权利要求1所述建筑工程技术的地基智能自动化平整设备,其特征在于:所述压平滚子(5)的两个侧面均设有呈环形阵列状分布的挤压块(501),两侧面的挤压块(501)相互交错,挤压块(501)为圆弧结构,挤压块(501)与第一刮除板(6)的内侧相接触。
7.如权利要求1所述建筑工程技术的地基智能自动化平整设备,其特征在于:所述第一刮除板(6)和第二刮除板(7)上均开设有相对正的刮除槽,第一刮除板(6)和第二刮除板(7)合并后刮除槽形成圆柱结构,第二刮除板(7)的外侧有两个第一定位杆(701),第一定位杆(701)为圆柱结构,第二支撑板(601)开设有两个滑动孔,第一定位杆(701)穿插于第二支撑板(601)的滑动孔内,第一定位杆(701)的外侧套接有一个第一支撑弹簧。
8.如权利要求1所述建筑工程技术的地基智能自动化平整设备,其特征在于:所述第三支撑板(8)的上方有一个第二定位杆(801),第二定位杆(801)的外侧套接有一个第二支撑弹簧,控制机体(1)开设有一个定位槽,第三支撑板(8)的端部卡接在控制机体(1)的定位槽内,第三支撑板(8)的底部有均匀分布的拨动杆(802),第三支撑板(8)的上方安装有一个距离传感器(803)。
9.如权利要求1所述建筑工程技术的地基智能自动化平整设备,其特征在于:所述清扫板(9)的底部有清扫凸起,清扫凸起与压平滚子(5)相接触,清扫板(9)的上方有两个第三定位杆(901),第三定位杆(901)的外侧套接有一个第三支撑弹簧,第三支撑板(8)的外侧有两个定位孔,第三定位杆(901)穿插于第三支撑板(8)的定位孔内。
技术总结
本发明提供建筑工程技术的地基智能自动化平整设备,涉及地基平整技术领域,解决了地基平整装置人工手动操控,压平滚子上会粘附有泥土,平整装置的耙子堆积泥土与杂质的问题,包括控制机体;所述控制机体的底部安装有滚轮;所述推动气缸安装在控制机体的内侧;所述第一支撑板的上方有一个转动套筒,推动气缸的推动杆底部安装在转动套筒内。通过推动气缸和第一支撑板将整体进行托举,通过驱动机构驱动整体转动进行角度调节,通过红外传感器和石灰线相配合对整体的移动位置定位,从而使整体能够沿着石灰线行走,对整体的移动路线进行规划,距离传感器使得整体在靠近障碍物时自动停止。
技术研发人员:梁秋华,冯晓辰
受保护的技术使用者:新疆玖道建设有限公司
技术研发日:20221117
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!