挖土机及挖土机用控制装置的制作方法
本发明涉及一种作为挖掘机的挖土机及挖土机用控制装置。
背景技术:
1、以往,已知一种以自动执行平整作业的方式被自动控制的液压挖土机(例如,参考专利文献1)。该液压挖土机构成为如下:为了避免挖得比设计面更深,执行在铲斗的铲尖下降得要比设计面更下方时使动臂强制性地上升的控制。
2、现有技术文献
3、专利文献
4、专利文献1:国际公开第2014/192474号
技术实现思路
1、发明要解决的课题
2、然而,若使动臂强制性地上升,则有可能会导致动臂与位于液压挖土机的上方的电线等物体接触。
3、因此,优选提供一种被更适当地自动控制的挖土机。
4、用于解决课题的手段
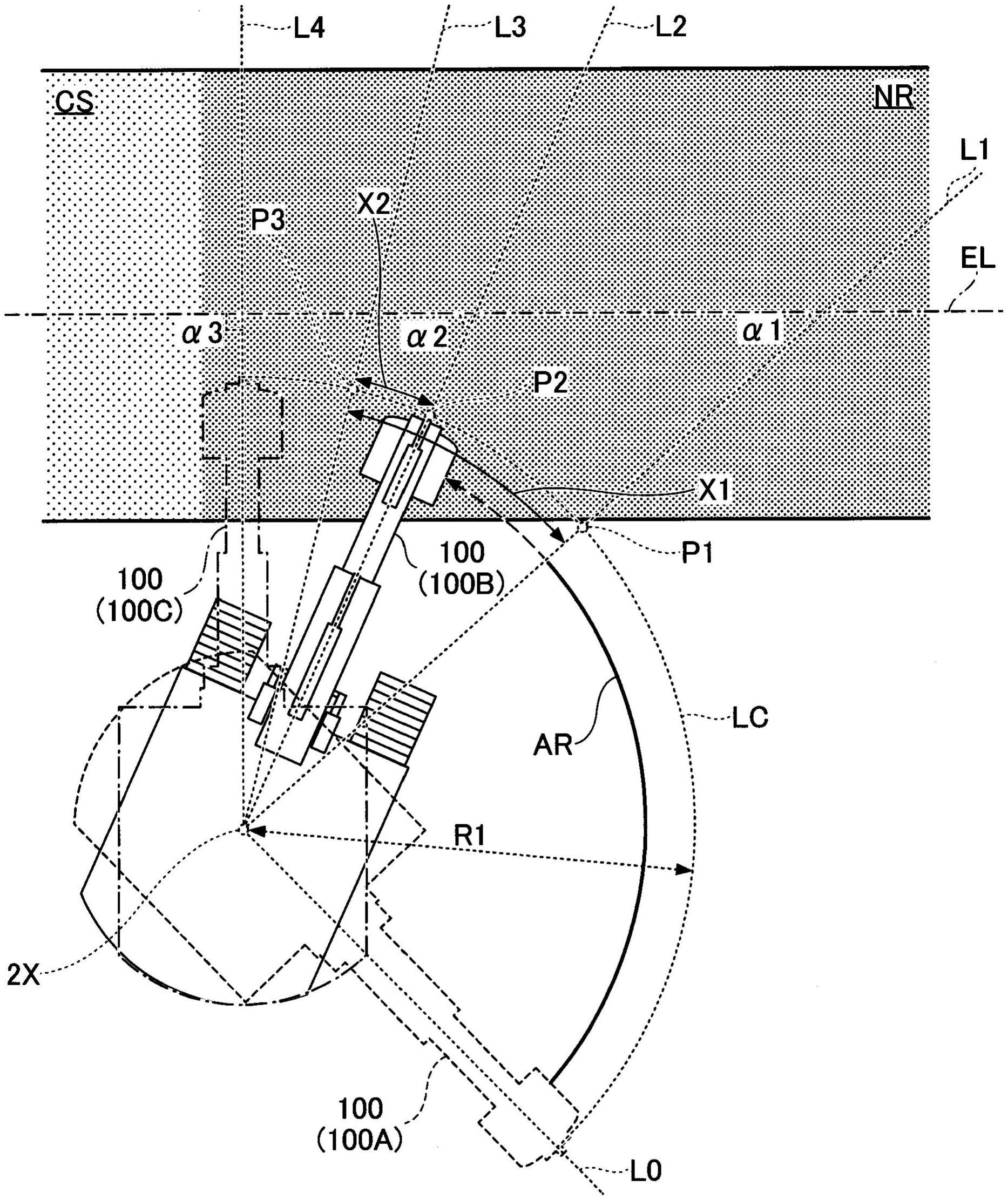
5、本发明的实施方式所涉及的挖土机具有:下部行走体;上部回转体,可回转地搭载于所述下部行走体;及附属装置,安装于所述上部回转体,在所述上部回转体回转时,在预想到所述附属装置与控制对象面干涉的情况下,使所述上部回转体的回转自动减速或停止。
6、发明效果
7、通过上述手段,提供一种被更适当地自动控制的挖土机。
技术特征:
1.一种挖土机,其具有:
2.根据权利要求1所述的挖土机,其中,
3.根据权利要求1所述的挖土机,其中,
4.根据权利要求3所述的挖土机,其中,
5.根据权利要求3所述的挖土机,其中,
6.根据权利要求1所述的挖土机,其中,
7.根据权利要求1所述的挖土机,其中,
8.一种挖土机用控制装置,控制挖土机,所述挖土机具有:下部行走体;上部回转体,可回转地搭载于所述下部行走体;及附属装置,安装于所述上部回转体,所述挖土机用控制装置构成为如下:
技术总结
挖土机(100)具有:下部行走体(1);上部回转体(3),可回转地搭载于下部行走体(1);及附属装置,安装于上部回转体(3)。并且,挖土机(100)构成为如下:在上部回转体(3)回转时,在预想到附属装置横过作为停止对象面的设计面的情况下,使上部回转体(3)的回转自动减速或停止。并且,挖土机(100)也可以构成为如下:在使上部回转体(3)的回转减速或停止时,禁止基于自动控制的动臂提升动作。
技术研发人员:泉川岳哉
受保护的技术使用者:住友建机株式会社
技术研发日:
技术公布日:2024/1/16
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1