用于控制作业机械的系统、方法以及程序与流程
本公开涉及用于控制作业机械的系统、方法以及程序。本申请针对2021年9月30日在日本提出申请的特愿2021-161745号而主张优先权,并将其内容援引于此。
背景技术:
1、在专利文献1中,公开了具备能够倾转旋转的倾转铲斗的建筑机械(作业机械)的控制系统。这样,已知有搭载能够绕相互不同的轴转动的多个转动机构且能够使铲斗等作业工具按照期望地转动的作业机械。
2、在先技术文献
3、专利文献
4、专利文献1:日本特开2020-125599号公报
技术实现思路
1、发明所要解决的课题
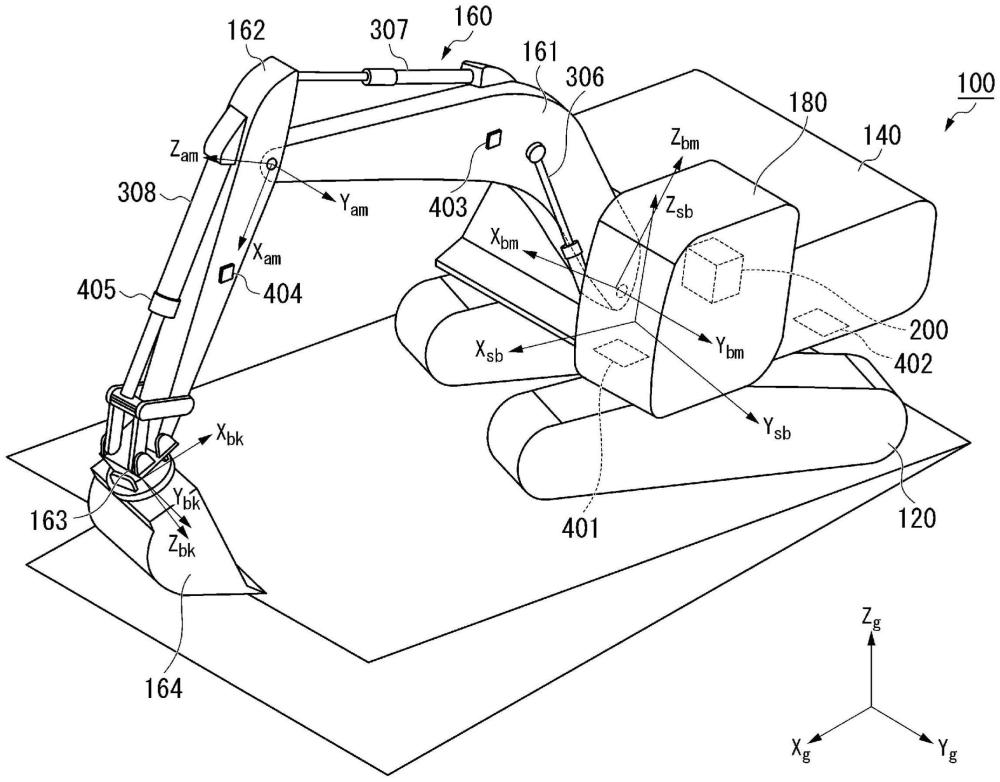
2、然而,己知有将作业机械的配件支承为能够绕相互正交的三个轴旋转的倾转旋转器这样的部件。通过将倾转旋转器安装于作业机械,能够使配件朝向任意的方向。另一方面,在液压挖掘机等作业机械中,最频繁地进行的基本操作之一有使铲斗沿着其开口方向转动的操作(铲斗操作)。铲斗操作是在进行挖掘、排土时等使用的操作。若是通常的液压挖掘机,则这样的操作能够通过简单的杆操作容易地执行。然而,在搭载有倾转旋转器的液压挖掘机中,为了使铲斗沿着其开口方向转动,要求与该铲斗的开口方向相应的复合操作。
3、本公开的目的在于提供一种在具备经由倾转旋转器而支承于工作装置的作业工具的作业机械中,能够简化使作业工具沿着其基准方向(例如,铲斗的开口方向)转动的操作的系统、方法以及程序。
4、用于解决课题的手段
5、根据本公开的一方案,一种用于控制作业机械的系统,所述作业机械具备:倾转旋转器,其安装于系统工作装置的前端;以及作业工具,其经由倾转旋转器以能够绕在相互不同的平面上交叉的三个轴旋转的方式支承于工作装置,且具备处理器。在处理器中,从多个传感器取得计测值。在处理器中,基于计测值,计算作业工具的当前的姿势。在处理器中,基于计算出的作业工具的当前的姿势,决定假想旋转轴。在处理器中,基于来自操作装置的操作信号,生成用于使作业工具绕假想旋转轴旋转的所述倾转旋转器的控制信号。在处理器中,输出所生成的所述控制信号。
6、发明效果
7、根据上述方案,在具备经由倾转旋转器而支承于工作装置的作业工具的作业机械中,能够简化使作业工具沿着其基准方向(例如,铲斗的开口方向)转动的操作。
技术特征:
1.一种用于控制作业机械的系统,所述作业机械具备:倾转旋转器,其安装于工作装置的前端;以及作业工具,其经由所述倾转旋转器以能够绕在相互不同的平面上交叉的三个轴旋转的方式支承于所述工作装置,
2.根据权利要求1所述的系统,其中,
3.根据权利要求1或2所述的系统,其中,
4.根据权利要求1至3中任一项所述的系统,其中,
5.一种用于控制作业机械的方法,所述作业机械具备:倾转旋转器,其安装于工作装置的前端;以及作业工具,其经由所述倾转旋转器以能够绕在相互不同的平面上交叉的三个轴旋转的方式支承于所述工作装置,
6.一种程序,其使具备安装于工作装置的前端的倾转旋转器、以及经由所述倾转旋转器以能够绕在相互不同的平面上交叉的三个轴旋转的方式支承于所述工作装置的作业工具的作业机械的控制系统的计算机执行:
技术总结
计测值取得部从多个传感器取得计测值。位置姿势计算部基于计测值来计算作业工具的当前的姿势。目标姿势决定部基于计算出的作业工具的当前的姿势,决定假想旋转轴。旋转量计算部基于来自操作装置的操作信号,生成用于使作业工具绕假想旋转轴旋转的倾转旋转器的控制信号。控制信号输出部输出所生成的控制信号。
技术研发人员:铃木光,岩村力,野崎匠,神田竜二,岩永大司,平尾友一,内田悠太,岛野佑基,佐佐木淳,北岛仁
受保护的技术使用者:株式会社小松制作所
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!