建筑机器的液压系统的控制的制作方法
本公开大体上涉及一种液压系统,并且例如涉及液压系统的控制。
背景技术:
1、作业机器或建筑机器,例如挖掘机或另一类似类型的机器,可以用于执行一个或多个工地操作(例如,材料转移、挖掘、平整等)。通常,这样的机器包括用于控制机器和/或机器的一个或多个部件的移动的液压系统。例如,液压系统可以用于控制机器的作业器具。更具体地,挖掘机的液压系统可以用于控制挖掘机的移动、挖掘机的主体的旋转(例如,用于摆动操作)和/或包括动臂、斗杆和铲斗的挖掘机的部件的移动。
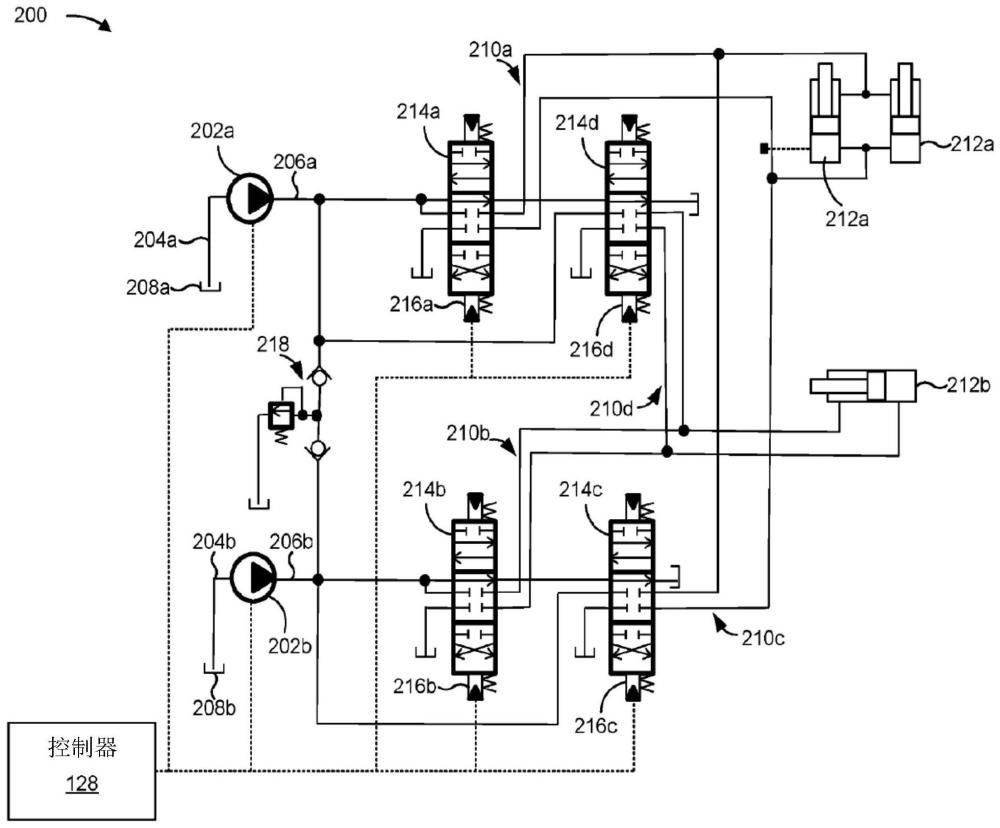
2、液压系统可包括泵,所述泵将加压流体供应到一个或多个液压回路以由此引起一个或多个致动器(例如,缸)的致动。在一些实例中,液压系统可以利用两个或更多个泵,所述两个或更多个泵使流体流过相应的液压回路以引起一个或多个致动器的致动。例如,用于挖掘机的液压系统可包括与一个或多个动臂致动器流体连通的主动臂液压回路和次动臂液压回路,以及与一个或多个斗杆致动器流体连通的主斗杆液压回路和次斗杆液压回路。第一泵可以使流体流过主动臂液压回路和次斗杆液压回路,并且第二泵可以使流体流过主斗杆液压回路和次动臂液压回路。在利用动臂和斗杆两者的挖掘机的操作期间,液压回路中的压力和限制差可能导致干扰,该干扰导致(一个或多个)动臂致动器和/或(一个或多个)斗杆致动器处的过量或减少的流动。与期望流体流动的偏差可能导致液压回路的速度的不平衡,从而导致降低的运动精度。
3、由机器执行的一些操作可能需要高精度。例如,挖掘机可以使用操作员辅助模式执行平整操作。在操作员辅助模式中,可以使动臂、斗杆和/或铲斗的移动自动化以将铲斗的轨迹保持在平整线处。因此,由于与期望流体流动的偏差而导致的降低的运动精度可能阻止实现将铲斗的轨迹保持在平整线处所必要的精度。
4、美国专利号9,845,590(’590专利)公开了一种包括第一液压泵和第二液压泵的液压系统,该液压系统用于为土方机器上的作业器具和子组件提供液压动力。’590专利指示第一液压泵可以与提升回路相关联,所述提升回路包括可以相对于机器升高和降低的提升臂,并且第二液压泵可以与用于使枢转地连接到提升臂的铲斗倾斜的倾斜回路和用于使机器转向的转向回路两者相关联。’590专利指出,由于第一液压泵和第二液压泵的布置,提升回路以及倾斜和转向回路可以同时地且彼此独立地操作。
5、用于本公开的液压系统的控制器在需要高精度的操作(例如使用操作员辅助模式的平整操作)期间提供使用第一泵对第一致动器的独立控制和使用第二泵对第二致动器的独立控制。在其他的情况下,第一致动器可以协同使用第一泵和第二泵被控制,并且第二致动器可以协同使用第一泵和第二泵被控制。因此,用于本公开的液压系统的控制器解决了上述问题和/或本领域其他问题中的一个或多个问题。
技术实现思路
1、液压系统可包括:用于控制第一连杆构件的第一致动器;用于控制连接到所述第一连杆构件和机器的作业器具的第二连杆构件的第二致动器;包括所述第一致动器的第一主液压回路和第一次液压回路;包括所述第二致动器的第二主液压回路和第二次液压回路;第一泵,所述第一泵用于使流体流过所述第一主液压回路和所述第二次液压回路;第二泵,所述第二泵用于使流体流过所述第二主液压回路和所述第一次液压回路;以及控制器。所述控制器可以配置成:确定为所述机器启用操作员辅助模式;以及基于确定所述操作员辅助模式被启用,使控制通过所述第一次液压回路的流体流动的第一阀和控制通过所述第二次液压回路的流体流动的第二阀关闭。
2、一种方法可包括确定为具有作业器具的机器启用操作员辅助模式,其中所述机器的第一连杆构件由第一致动器控制,并且连接到所述第一连杆构件和所述作业器具的所述机器的第二连杆构件由第二致动器控制,并且其中第一主液压回路和第一次液压回路包括所述第一致动器,并且第二主液压回路和第二次液压回路包括所述第二致动器。所述方法可包括检测所述作业器具的位置满足与所述操作员辅助模式有关的条件。所述方法可包括基于确定所述操作员辅助模式被启用并且检测到所述作业器具的所述位置满足所述条件,使控制通过所述第一次液压回路的流体流动的第一阀和控制通过所述第二次液压回路的流体流动的第二阀关闭。
3、挖掘机可包括:铲斗;连接到所述铲斗的斗杆构件;连接到所述斗杆构件的动臂构件;用于控制所述斗杆构件的斗杆致动器;用于控制所述动臂构件的动臂致动器;包括所述斗杆致动器的主斗杆液压回路和次斗杆液压回路;包括所述动臂致动器的主动臂液压回路和次动臂液压回路;第一泵,所述第一泵用于使流体流过所述主动臂液压回路和所述次斗杆液压回路;第二泵,所述第二泵用于使流体流过所述主斗杆液压回路和所述次动臂液压回路;以及控制器。所述控制器可以配置成:检测所述铲斗的位置满足条件;以及基于检测到所述铲斗的所述位置满足所述条件,使控制通过所述次动臂液压回路的流体流动的第一阀和控制通过所述次斗杆液压回路的流体流动的第二阀关闭。
技术特征:
1.一种液压系统(200),包括:
2.根据权利要求1所述的液压系统(200),其中所述作业器具是铲斗(118),所述第一连杆构件是动臂构件(114),并且所述第二连杆构件是斗杆构件(116)。
3.根据权利要求1-2中任一项所述的液压系统(200),其中所述控制器(128)配置成使所述第一阀(214c)和所述第二阀(214d)关闭以将所述第一致动器(212a)与所述第二泵(202b)隔离并且将所述第二致动器(212b)与所述第一泵(202a)隔离。
4.根据权利要求1-3中任一项所述的液压系统,其中,为了使所述第一阀(214c)和所述第二阀(214d)关闭,所述控制器(128)配置成:
5.一种方法,包括:
6.根据权利要求5所述的方法,其中所述条件是所述作业器具的所述位置距平整线为阈值距离。
7.根据权利要求6所述的方法,其中距所述平整线的所述阈值距离可以比用于激活所述操作员辅助模式的距所述平整线的不同阈值距离更远离所述平整线。
8.根据权利要求5-7中任一项所述的方法,其中所述操作员辅助模式用于平整操作、夷平操作或挖掘操作。
9.根据权利要求5-8中任一项所述的方法,其中所述操作员辅助模式使所述第一连杆构件、所述第二连杆构件或所述作业器具中的一个或多个的移动自动化。
10.根据权利要求5-9中任一项所述的方法,还包括:
技术总结
液压系统可包括:用于控制第一连杆构件的第一致动器;用于控制第二连杆构件的第二致动器;包括所述第一致动器的第一主液压回路和第一次液压回路;包括所述第二致动器的第二主液压回路和第二次液压回路;第一泵,所述第一泵用于使流体流过所述第一主液压回路和所述第二次液压回路;第二泵,所述第二泵用于使流体流过所述第二主液压回路和所述第一次液压回路;以及控制器。所述控制器可以配置成确定启用操作员辅助模式,以及使控制通过所述第一次液压回路的流体流动的第一阀和控制通过所述第二次液压回路的流体流动的第二阀关闭。
技术研发人员:A·M·那克斯,R·G·梅茨格,C·R·西苏尔,S·D·斯潘塞
受保护的技术使用者:卡特彼勒公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!