轮式装载机的制作方法
本发明涉及搭载了自动挖掘控制系统的轮式装载机。
背景技术:
1、近年来,出于提高作业效率等目的,出现了通过控制器控制作业装置的动作来进行挖掘作业的轮式装载机。控制器判定轮式装载机处于开始挖掘作业的状态,代替由操作员对操作装置进行操作,将与提升臂的提起操作有关的指令信号、与铲斗的立起操作(也称为倾转操作或倾卸操作)有关的指令信号向作业装置的驱动回路输出而使作业装置动作。
2、例如,在专利文献1中公开了一种轮式装载机,控制器根据铲斗的倾转动作速度、铲斗缸的驱动量以及预先设定的时间来生成指令信号,按照在控制器内生成的指令信号来开始以及结束铲斗的倾转动作。在该轮式装载机中,能够以事先设想的铲斗动作量的轨迹进行挖掘。
3、另外,在专利文献2所记载的轮式装载机中,控制器根据提升臂缸的底压以及车速自动地开始铲斗的倾转动作(自动倾转动作),根据铲斗开始自动倾转动作的时间点的提升臂缸的自底压起的上升量结束铲斗的自动倾转动作。因此,该轮式装载机能够根据牵引力的大小来控制作业装置。
4、现有技术文献
5、专利文献
6、专利文献1:美国专利申请公开第2006/0245896号说明书
7、专利文献2:国际公开第2015/004809号
技术实现思路
1、发明要解决的课题
2、作为轮式装载机的作业对象物的土堆根据砂土、矿物等构成要素的性状,斜面与水平面所成的角度即安息角不同,但在专利文献1所记载的轮式装载机的情况下,铲斗从挖掘作业的开始到结束以事先设想的轨迹进行动作,因此,可能无法根据安息角的大小,将足够量的货物铲入到铲斗内。例如,在安息角大的情况下,在铲斗的角度为水平状态或比水平状态向近前(车身侧)稍微进行了倾转动作的状态下,在挖掘作业中从土堆(砂土、矿物等)受到的反作用力不会过大,能够一边将作业装置向上方抬起一边使车身前进,因此,能够将铲斗相对于土堆插入至深处而将大量的货物取入到铲斗内。另一方面,在安息角小的情况下,在铲斗的角度为水平状态或比水平状态向前方(远离车身的方向)稍微进行了倾卸动作的状态下,在挖掘作业中从土堆(砂土、矿物等)受到的反作用力不会过大,能够一边将作业装置向上方抬起一边使车身前进,因此,能够将铲斗相对于土堆插入至深处而将大量的货物取入到铲斗内。另外,即使是挖掘相同大小的安息角的土堆的情况,若作业装置的初始姿势不同,则动作轨迹也不同,因此,该情况下有时也无法将足够量的货物铲入到铲斗内。
3、另一方面,在专利文献2所记载的轮式装载机中,控制器根据提升臂缸的底压来判定挖掘作业的开始以及结束,铲斗的动作轨迹根据土堆的安息角的大小而变化,因此,与专利文献1所记载的轮式装载机不同,即使相对于安息角的大小不同的土堆,也能够将足够量的货物铲入到铲斗内。
4、轮式装载机在将货物铲入到铲斗内时,利用相对于前进的驱动力的来自土堆的反作用力使货物向铲斗的里侧移动。因此,在挖掘作业结束之前的阶段,优选铲斗的姿势未大幅后倾。然而,在专利文献2所记载的轮式装载机的情况下,控制器根据提升臂缸的底压来判定挖掘作业的结束,因此,例如,根据挖掘开始前的车速的大小、土堆的硬度的不同,在挖掘作业的最终阶段之前的阶段,提升臂缸的底压上升至接近结束时的压力的值,有时铲斗变化为大幅后倾的姿势(接近全倾转的姿势)。该情况下,无法以挖掘作业的最终阶段的铲斗动作使货物充分地移动至铲斗的里侧,货物装载于铲斗的爪尖侧(开口附近),在挖掘作业后的搬运作业时货物可能从铲斗洒落。
5、因此,本发明的目的在于提供一种无论作业对象物的大小、性状、挖掘开始前的动作内容如何,都能够将货物充分地装载到铲斗内的轮式装载机。
6、用于解决课题的手段
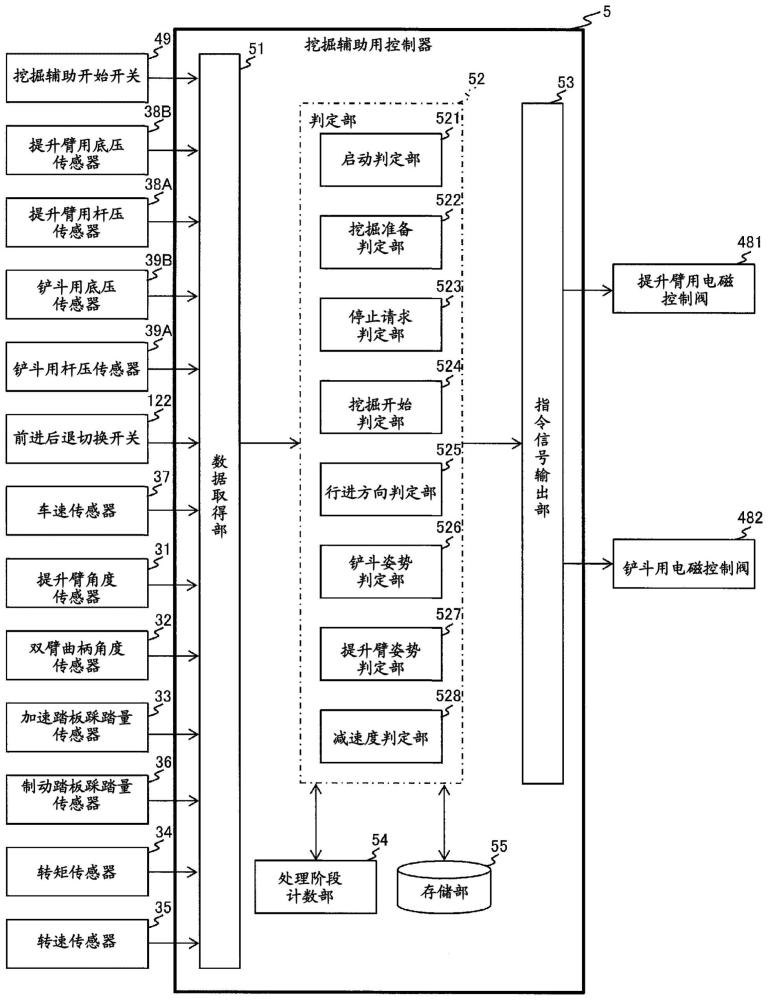
7、为了达成上述目的,本发明提供一种轮式装载机,具有:提升臂,其安装于车身的前部,相对于所述车身沿上下方向转动;铲斗,其安装于所述提升臂的前端部,通过相对于所述提升臂沿上方向转动而向所述车身侧后倾的倾转动作来挖掘作业对象物;提升臂缸,其驱动所述提升臂;铲斗缸,其驱动所述铲斗;提升臂用电磁控制阀,其控制所述提升臂缸;铲斗用电磁控制阀,其控制所述铲斗缸;以及控制器,其分别控制所述提升臂用电磁控制阀及所述铲斗用电磁控制阀,所述轮式装载机的特征在于,所述轮式装载机具有:压力传感器,其检测所述提升臂缸的底压;以及铲斗姿势传感器,其检测所述铲斗的姿势,所述控制器在由所述压力传感器检测到的底压达到了与所述提升臂未动作的状态且所述铲斗与所述作业对象物接触的状态的所述提升臂的底压相当的第一压力阈值的情况下,对所述提升臂用电磁控制阀输出与所述提升臂的上升动作有关的指令信号,在由所述铲斗姿势传感器检测出的所述铲斗的姿势是比预定的姿势前倾的姿势的情况下,向所述提升臂用电磁控制阀继续输出与所述提升臂的上升动作有关的指令信号,并且向所述铲斗用电磁控制阀输出与所述铲斗的倾转动作有关的指令信号,直至所述铲斗成为所述预定的姿势为止,在由所述铲斗姿势传感器检测出的所述铲斗的姿势达到了所述预定的姿势的情况下,对所述铲斗用电磁控制阀输出与所述铲斗的全倾转动作有关的指令信号。
8、发明效果
9、根据本发明,无论作业对象物的大小、性状、挖掘开始前的动作内容如何,都能够在铲斗内充分地装载货物。上述以外的课题、结构及效果通过以下的实施方式的说明而明确。
技术特征:
1.一种轮式装载机,具有:
2.根据权利要求1所述的轮式装载机,其特征在于,
3.根据权利要求2所述的轮式装载机,其特征在于,
4.根据权利要求1所述的轮式装载机,其特征在于,
5.根据权利要求1所述的轮式装载机,其特征在于,
技术总结
本发明提供一种无论作业对象物的大小、性状、挖掘开始前的动作内容如何,都能够向铲斗内充分地装载货物的轮式装载机。在具有自动控制作业装置(2)的挖掘辅助用控制器(5)的轮式装载机(1)中,挖掘辅助用控制器(5)在铲斗(23)为比预定的姿势前倾的姿势的情况下,对提升臂用电磁控制阀(481)继续输出与上升动作有关的指令信号,并且对铲斗用电磁控制阀(482)输出与倾转动作有关的指令信号,直至铲斗(23)为预定的姿势为止,在铲斗(23)的姿势达到预定的姿势的情况下,对铲斗用电磁控制阀(482)输出与全倾转动作有关的指令信号。
技术研发人员:堤芳明,森木秀一,井村进也
受保护的技术使用者:日立建机株式会社
技术研发日:
技术公布日:2024/4/22
- 还没有人留言评论。精彩留言会获得点赞!