一种挖掘机回转马达装置的制作方法
本发明涉及工程机械,特别涉及一种挖掘机回转马达装置。
背景技术:
1、挖掘机是一种常见的可回转式的工程机械,其主要用于土石方作业,通过动臂、斗杆、铲斗、回转进行复合动作以完成挖掘和卸载;其中,回转马达是挖掘机实现上车回转动作的执行元件,回转动作不仅影响挖掘机的操作性更影响整体的作业效率;
2、目前,回转马达的智能化、自动化程度较低,都是在马达出现工作异常,无法启动等情况时,才会对回转马达进行维修更换等,回转马达装置的监测系统较少,无法监测回转马达内油温、油压、油量等情况,功能不够完善,且不具备报警提醒等功能。
技术实现思路
1、本发明提供一种挖掘机回转马达装置,以解决上述背景技术中提出的问题。
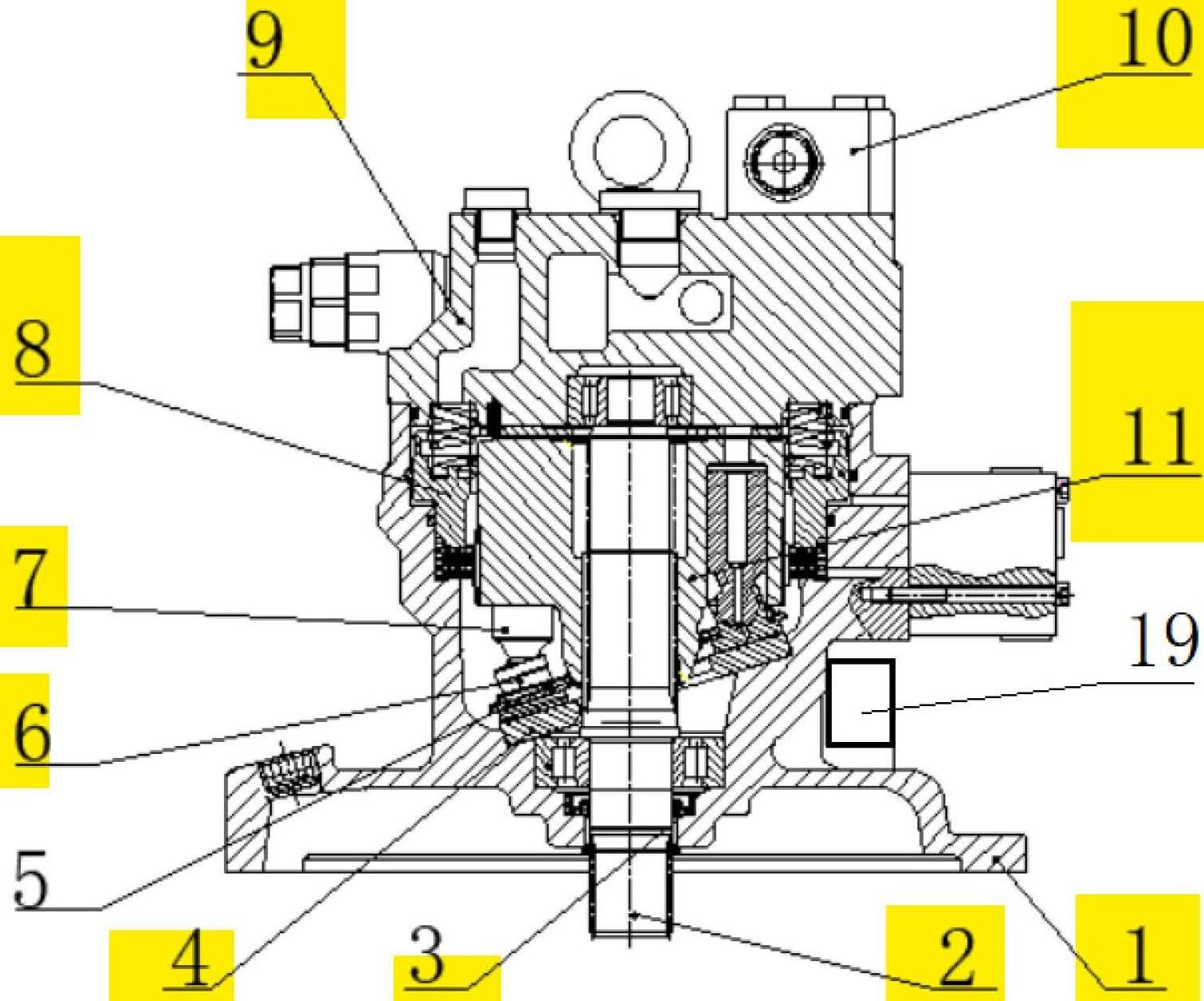
2、为解决上述技术问题,本发明公开了一种挖掘机回转马达装置,包括壳体,壳体内转动安装有缸体,缸体内一体成型设有驱动轴,驱动轴向下延伸出缸体和壳体,且驱动轴与缸体和壳体延伸位置转动连接,缸体还设有若干柱塞组件,柱塞组件可向下延伸出缸体,柱塞组件下端抵接有回程盘组件,回程盘组件套设于驱动轴上,且壳体上还设有智能监测模块。
3、优选的,柱塞组件包括柱塞,柱塞安装于缸体内,柱塞下端固定连接圆头,圆头下端铰接有滑靴,滑靴下端抵接有回程盘组件,回程盘组件包括回程盘,回程盘与滑靴抵接,回程盘下端固定连接止推板,且回程盘和止推板均套设于驱动轴上。
4、优选的,壳体上安装有后盖组件,后盖组件上设置有平衡阀组件,壳体内还安装有刹车组件,且驱动轴延伸出缸体的位置设有骨架油封。
5、优选的,壳体右侧前后分设有油口a和油口b,油口a和油口b用于马达输油和排油,壳体上侧中央位置设有过载补油口,壳体上侧偏心位置还设有卸油口,壳体右侧设有解除制动油口,解除制动油口下侧设有换向先导油口,平衡阀组件上侧设有检测口a和检测口b,且油口a、油口b、过载补油口、卸油口、解除制动油口、换向先导油口、检测口a和检测口b均与壳体贯通连接。
6、优选的,智能监测模块包括:油量检测单元、第一提示单元、第二提示单元;
7、油量检测单元设置于壳体内壁上;
8、第一提示单元、第二提示单元与油量检测单元相连;
9、油量检测单元用于基于壳体内的实时液面高度确定出壳体内的实时油量;
10、第一提示单元,用于当实时油量小于油量最低阈值时发出第一提示信号;
11、第二提示单元,用于当实时油量超出油量最高阈值时发出第二提示信号。
12、优选的,油量检测单元包括:液面获取子单元、倾斜度测量子单元、油量计算子单元;
13、液面获取子单元设置于壳体内壁上;
14、倾斜度测量子单元设置于壳体表面;
15、油量计算子单元与液面获取子单元、倾斜度测量子单元相连;
16、液面获取子单元,用于获取壳体内的实时液面高度;
17、倾斜度测量子单元,用于检测壳体的实时倾斜角度;
18、油量计算子单元,用于基于第一实时液面高度、第二实时液面高度和实时倾斜角度以及壳体的三维尺寸,计算出壳体内的实时油量。
19、优选的,液面获取子单元包括:依次相连的图像获取端、图像拼接端、界线确定端、曲线拟合端、高度确定端;
20、图像获取端,用于从多个预设拍摄角度获取壳体中的液面高度图像;
21、图像拼接端,用于基于预设拍摄角度的空间位置关系,将所有液面高度图像依次拼接,获得壳体中的液面高度环绕图像;
22、界线确定端,用于基于液面高度环绕图像确定出壳体中的液面与壳体内壁的环绕接触界线;
23、曲线拟合端,用于将环绕接触界线用预设坐标系表示,并确定出环绕接触界线中每个极大值和在预设方向上相邻的极小值之间的高度差,按照顺序将所有高度差拟合成高度差曲线;
24、高度确定端,用于基于高度差曲线校正环绕接触界线,获得环绕接触光滑界线,基于环绕接触光滑界线确定出壳体内的实时液面高度。
25、优选的,高度确定端包括:依次相连的曲线划分子端、曲线确定子端、高度确定子端;
26、曲线划分子端,用于确定出高度差曲线中的极值点,将极值点作为划分位置,将高度差曲线划分为多个部分高度差曲线;
27、曲线确定子端,用于确定出每个部分高度差曲线的一次导数函数,确定出与一次导数函数相似度最大的线性函数,基于线性函数确定出对应的部分校正高度差曲线;
28、高度确定子端,用于基于所有部分校正高度差曲线校正环绕接触界线,获得环绕接触光滑界线,基于环绕接触光滑界线确定出壳体内的实时液面高度。
29、优选的,高度确定子端基于所有部分校正高度差曲线校正环绕接触界线,获得环绕接触光滑界线,基于环绕接触光滑界线确定出壳体内的实时液面高度的方法,包括:
30、将所有部分校正高度差曲线进行拼接,获得完整校正高度差曲线,基于完整校正高度差曲线计算出环绕接触界线中每个极值的校正值,基于对应的校正值校正环绕接触界线中对应的极值,获得环绕接触校正界线;
31、对环绕接触校正界线进行光滑处理,获得环绕接触光滑界线,基于环绕接触光滑界线上每个点在液面高度环绕图像中的参考高度值确定出环绕接触光滑界线上每个点在壳体中的实际高度值,基于环绕接触光滑界线上所有点在壳体中的实际高度值计算出壳体内的实时液面高度。
32、优选的,智能监测模块还包括:油压检测单元、油温检测单元、第一报警单元、第二报警单元;
33、油压检测单元设置于检测口a内壁上,油温检测单元设置于检测口b内壁上;
34、油压检测单元,用于检测检测口a处的实时油压;
35、油温检测单元,用于检测检测口b处的实时油温;
36、第一报警单元,用于当实时油压超出油压安全范围时发出第一报警信号;
37、第二报警单元,用于当实时油温超出油温安全范围时发出第二报警信号。
技术特征:
1.一种挖掘机回转马达装置,其特征在于,包括壳体(1),壳体(1)内转动安装有缸体(11),缸体(11)内设有驱动轴(2),驱动轴(2)向下延伸出缸体(11)和壳体(1),且驱动轴(2)与缸体(11)和壳体(1)延伸位置转动连接,缸体(11)还设有若干柱塞组件(7),柱塞组件(7)可向下延伸出缸体(11),柱塞组件(7)下端抵接有回程盘组件,回程盘组件套设于驱动轴(2)上,且壳体(1)上还设有智能监测模块(19)。
2.根据权利要求1所述的一种挖掘机回转马达装置,其特征在于,柱塞组件(7)包括柱塞,柱塞安装于缸体(11)内,柱塞下端固定连接圆头,圆头下端铰接有滑靴(6),滑靴(6)下端抵接有回程盘组件,回程盘组件包括回程盘(5),回程盘(5)与滑靴(6)抵接,回程盘(5)下端固定连接止推板(4),且回程盘(5)和止推板(4)均套设于驱动轴(2)上。
3.根据权利要求2所述的一种挖掘机回转马达装置,其特征在于,壳体(1)上安装有后盖组件(9),后盖组件(9)上设置有平衡阀组件(10),壳体(1)内还安装有刹车组件(8),且驱动轴(2)延伸出缸体(11)的位置设有骨架油封(3)。
4.根据权利要求1所述的一种挖掘机回转马达装置,其特征在于,壳体(1)右侧前后分设有油口a(13)和油口b(14),油口a(13)和油口b(14)用于马达输油和排油,壳体(1)上侧中央位置设有过载补油口(16),壳体(1)上侧偏心位置还设有卸油口(15),壳体(1)右侧设有解除制动油口(12),解除制动油口(12)下侧设有换向先导油口(11),平衡阀组件(10)上侧设有检测口a(17)和检测口b(18),且油口a(13)、油口b(14)、过载补油口(16)、卸油口(15)、解除制动油口(12)、换向先导油口(11)、检测口a(17)和检测口b(18)均与壳体(1)贯通连接。
5.根据权利要求1所述的一种挖掘机回转马达装置,其特征在于,智能监测模块(19)包括:油量检测单元、第一提示单元、第二提示单元;
6.根据权利要求5所述的一种挖掘机回转马达装置,其特征在于,油量检测单元包括:液面获取子单元、倾斜度测量子单元、油量计算子单元;
7.根据权利要求6所述的一种挖掘机回转马达装置,其特征在于,液面获取子单元包括:依次相连的图像获取端、图像拼接端、界线确定端、曲线拟合端、高度确定端;
8.根据权利要求7所述的一种挖掘机回转马达装置,其特征在于,高度确定端包括:依次相连的曲线划分子端、曲线确定子端、高度确定子端;
9.根据权利要求8所述的一种挖掘机回转马达装置,其特征在于,高度确定子端基于所有部分校正高度差曲线校正环绕接触界线,获得环绕接触光滑界线,基于环绕接触光滑界线确定出壳体(1)内的实时液面高度的方法,包括:
10.根据权利要求1所述的一种挖掘机回转马达装置,其特征在于,智能监测模块(19)还包括:油压检测单元、油温检测单元、第一报警单元、第二报警单元;
技术总结
本发明提供了一种挖掘机回转马达装置,涉及工程机械技术领域,包括壳体,壳体内安装有缸体,缸体内一体成型设有驱动轴,驱动轴向下延伸出缸体和壳体,且驱动轴与缸体和壳体延伸位置转动连接,缸体还设有若干柱塞组件,柱塞组件下端铰接有回程盘组件,回程盘组件下端固定连接止推板,且止推板套设于驱动轴上,且壳体上还设有智能监测模块。本发明通过设置智能监测模块,可以有效的提高回转马达装置的智能化、自动化程度,并对回转马达装置中的油温、油压、油量进行实时监测,并实时提醒人员回转马达的工作情况。
技术研发人员:周国东,余倡合,朱凯明,虞伟
受保护的技术使用者:广州华欣液压科技股份有限公司
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!